

Ijraset Journal For Research in Applied Science and Engineering Technology
Signature Verification Using Neural Network
Authors: K. Priyadarshini, Nisanth Sai. A, P. Sai Krishna, Dr. Shruti Bhargava Choubey
DOI Link: https://doi.org/10.22214/ijraset.2022.40948
Certificate: View Certificate
Abstract
In this paper we are about to present a latest improved off-line signature verification system using global and texture features of the signatures. This version is based on the technique that applies pre-processing on the signature to get a binary image and then calculate the global and features points from it and than maintain a updated vector. All calculations are done on the basis of these feature points. The feature vector obtained from the global and texture features is used to compare with the feature vector of incoming testing signature. Based on the values obtained, the network will decide the appropriateness of the signature. The suggested scheme discriminates between original and the forged signatures using artificial neural network (ANN) for training and verification of signatures. The method takes care of simple and the random forgeries and the skilled forgeries are also eliminated in greater extent. The objective of the work is to reduce two vital parameters, False Acceptance Rate (FAR) and the False Rejection Rate (FRR). So the results are expressed in terms of FAR and FRR and subsequently comparative analysis has been made with standard existing techniques. Results obtained by our proposed algorithm are more efficient than most of the existing techniques.
Introduction
I. INTRODUCTION
A signature is generally a type of special case of handwriting which includes special and flourishes. It’s a behavioural biometric which is in control of the subject & tend to change over the short and long terms due to various factors such as health, aging and physiological state. Other traits like speaking and walking also come under behavioural biometric. Physiological biometrics on other hand mainly measures the physical features of the subject such as face, fingerprint, iris, hand and finger geometry. The physical features mostly remain same unlike the behavioural characteristics. A behavioural biometric generally mainly requires to the several samples due to the inherent variations. Signature variations depend on mental , fatigue, & physical state, writing position & physical state. Signature recognition and verification is one of the most important ways to identify the owner of the signature and also to find whether the signature is genuine or not. It also holds a particular importance as it the only widely accepted method for endorsing financial transactions. The signature verification can be also mainly divided into two methods which are online (dynamic) and off-line (static) verification. In this study, we are going for off-line verification
where the subject’s signature is acquired on paper and scanned where biometric system recognizes with the specific features and states the genuinely consists of it.
A. Online Signature Recognition & Verification
Online signature recognition and verification refers to a process where the user’s signature is acquired on a digital device. The signer with the special uses a special pen called stylus to create their signature. As the Figure 1.1 shows the process where there the user’s signature is acquired on a digital device.

B. Off-line Signature Recognition & Verification
Off-line signature recognition and verification and recognition are concerned with the verification of signature made by a normal pen. Figure 1.3 shows the process where the user’s signature is acquired on paper using a pen.
Off-line SVRS can be done using two different approaches. One is the writer which his dependent signature verification, where models for genuine and forgery signatures are constructed for each writer. Then, the test signature sample of the writer is compared to its own training sample of its kind. The second approach is as called writer-independent signature verification is used by majority of the forensic experts. Figure 1.4 shows the static with off-line form of signature which is acquired on paper using a pen by the user.
C. Organization of the Report
This report starts with an overview of different ways of signature recognition and verification. We analyze the impact of different techniques and procedures to be performed on the images before comparison called pre-processing and feature extraction techniques in order to get an accurate output. The report is organized as follows:
- Chapter 1: Introduction - This chapter briefly explains the overview of the report.
- Chapter 2: Database - This chapter describes how the database should be collected.
- Chapter 3: Pre-processing Techniques - This chapter discusses about the pre-processing techniques that are performed on the investigation image before feature extraction takes place.
- Chapter 4: Feature Extraction - This chapter explains about the features to be extracted from the image in order to compare between genuine and forged signature.
- Chapter 5: Feature Matching - This chapter describes the process of feature matching which happens between two images.
- Chapter 6: Decision for Authentication - This chapter explains about how the output decision is made after the comparison between two images.
- Chapter 7: Conclusions - This chapter summarizes the major accomplishments of this report.
II. LITERATURE REVIEW
Verification of signature in addition to being the most research area in the field of pattern in recognizing and image processing also plays a key role in many applications such as access control, security, privacy etc. Verifying a signature is piece of work to be done or undertaken by validating it based on hardcopy like signature. There are two types of signature verification systems
- On-line Signature Verification System which use electronic device such as a tablet to capture features like pressure speed direction etc.
- Offline Signature Verification System in which the signature is written offline and the system read the image scan then verifies it with the already stored image of its signature. Offline signature verification can be done using two different approaches.
There are various ways to determine and verify Signatures.
K. Krishnaditya et.al [1] has proposed offline signature recognition using CNN (Convolutional neural networks). It is high proficient in areas like identification of objects faces etc. Still have some security issues when compared with dynamic form of signature verification.
L. G. Hafeman [2] had mentioned, or a forgery (produced by an impostor).This paper formalized the problem at hand, and list the main datasets that available to evaluate such systems. Hidden markov model was proposed for scanner resolution problem i.e. for 45 dpi to 600 dpi we need 150dpi. Feature Extraction such as Local features are extracted from a small part or a small region of the signature, Global features are extracted considering the complete signature image as a whole new thing.
Parameters of sign such as like the autograph dimensions height to width ratio, height and width this includes basic descriptors, such as the signature height, width, caliber (height-to-width ration) and area. Statistical extractors some statistical features extracted from offline signatures are mean, centre of gravity of the signature image, global maxima, local maxima, moments etc. Statistical features can tolerate slight variations in signature style and distortion. And model training using deep learning techniques. Not been suf?ciently addressed in the literature is the usage of one-class classi?cation models. One-class classi?cation systems that work well with low number of samples per user in deep learning.
T. Islam [3] and Feature extraction where some features such as distance travelled by pen number of pen lifts etc…The issue with this paper is they didn’t focus on correlations between the hesitation feature and type of signature, and its complexity.
S. Mushtaq et.al [4] has proposed to consider more reliable biometric feature, signature verification for the considering. The techniques are the Normalized signature area is the total number of signature pixels or foreground pixels in the signature image., Aspect ratio is defined as ratio of Width &Height. the quality or state of being correct or precise is gained from the previous systems is not high and more of investigate systematically on verification of offline signature is done. Future work may also include the fusion of different classifier for better verification results.
A. I. Al-Shoshan et.al [5] had proposed the neural network used for pattern classification is done by structural analysis and Fourier descriptor.
III. DATABASE
Signature should be made on an unscrambled blank sheet of paper and shot with a camera which is focused on the image. The image should then be modified to a square resolution to be used.
A. Database Preparation
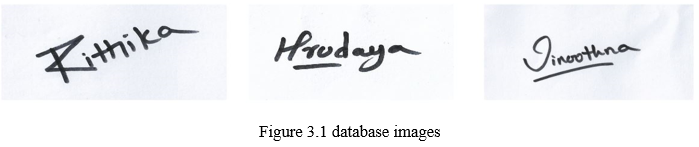
Metrics database plays a vital role in the procedure of signature verification. In pattern classification, there are two phases - (i) training and (ii) testing. In training phase, the signature classifier is modeled. Adequate number of the signature versions are needed to classify the classifier. The larger database represents a population properly and it helps in producing more reliable results. Over a large area or range , extensively accepted and a norm benchmark signature database is even not available for the verification of offline signature. Therefore, we tried to develop our own signature databases for our experimentation. Figure 3.1 tells the autographs which are considered as data models with a set of five for each signature.
B. Scanner Resolution
A scanner is specified by many factors such as - Scanner Type, Scanner Resolution, Maximum Resolution, Maximum Scan Area, Scanning Speed, Light Source, Color Bit Depth etc. Our concern was only the Scanner Resolution. Because other parameters do not affect the essential quality of the signature images required for our purpose. Scanner Resolution is a measurement of the resolving power of a scanner. Resolution of a scanner is the measurement of number of pixels that it can text in processed picture. It conveyed in dots per inch (dpi). 200 dpi means 200×200 or 40k dots per sq inch. If resolution of a scanner is more, it implies that more numbers of dots or pixels are captured per inch of the image by the scanner. picture verified with a high resolution can be extracted more. Thus scanner solution indicates extensively more withstandness of the scanner. Resolution of scanned images is also an important factor that influences the stages of signature verification. High resolution results more detailed images. But, there required a large quantity of data storage space and also have some noise. Thus computational cost is also higher. But required information may be lost in such images as their quality is affected by lower resolution. Thus intensions to resolve the pictures of signatures is appropriately decided.
C. Signature Preparation
There must be a proper way of collecting the signature samples.The amount of signature data base depends upon the protocols collections of signature. To develop a high quality signature database for research purpose, their collection must be carefully controlled. It is seen that the genuine signatures possess high stability and less variation. But the forged signatures are highly inconsistent. Forged signatures are collected from lay forgers. It is not possible to convince (or even find) a professional forger to develop a database of forged signatures. Such forged signatures are not only deviated from their genuine counterpart, they contain large variations among themselves. These influence the act of presenting the verification of the signature to get the better of inconsistency infraud signature, here are few ways to explain it by the any researches.
(i) The forger should be motivated by an award for his good consistent work and they must be encouraged to practice sufficiently.
(ii) Forgers with inconsistency should be denied while developing the database.
(iii) Stability of the signatures should be checked using statistical test. Signature samples passing a minimum predefined threshold limit should only be included in the database.
IV. METHODOLOGIES
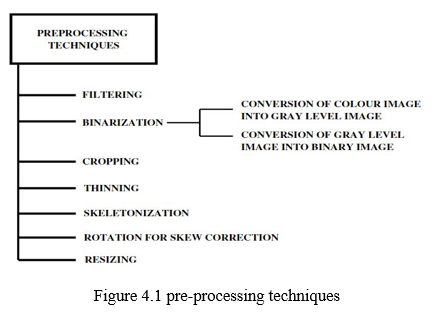
A. PRE-PROCESSING Techniques
After capturing the signature samples, the next step is to enhance the images and make them ready for the subsequent processing. The pictures need to be preliminary process earlier by giving them the further process. Pre-processing is done using signal processing algorithms. The technique which is pre-processing will highly assistance to improve the efficiency of the further feature extraction and thereby classification. Depending on the type of signature pattern, signature image quality and classification techniques to be used, pre-processing operations are determined. It must be kept in mind that during pre-processing, information from the images should not be discarded. The process of loosing data will influence the complete preciseness of the systems signature verification.
- Filtering
A scanned signature image may contain noise. Noise in the picture deteriorates the feature removal and its successive processes. Hence, filtering of an noise is not able to avoid. pre-processing step in pattern recognition. It has been keenly noticed that the scanned picture are usually affects the salt-pepper noise. A median filter effectively removes such type of noise preserving the edges of the images we applied a median filter of 3×3 window on our signature images. The median filter [13] is a non-linear spatial filter that uses a sub-image area or window. This window is usually of square shape and is of fixed size. with the median of all the pixel values in the window.
The pixel value of the window in Fig. 4.2 in ascending order is 1, 4,5,5,6,6,7,10,67
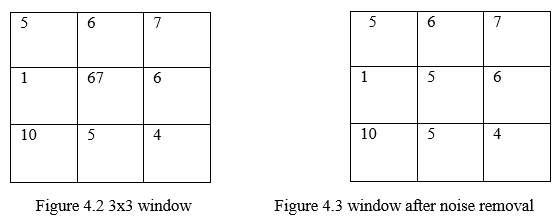
Figure 4.2 Shows the median which is an (the middle value in a string) 5. When the center value in the window (67) which is possibly a disturbance, is replaced with an intermediate value (5), the following new window in Figure 3.3 is found, where the noise is removed.
2. Binarization
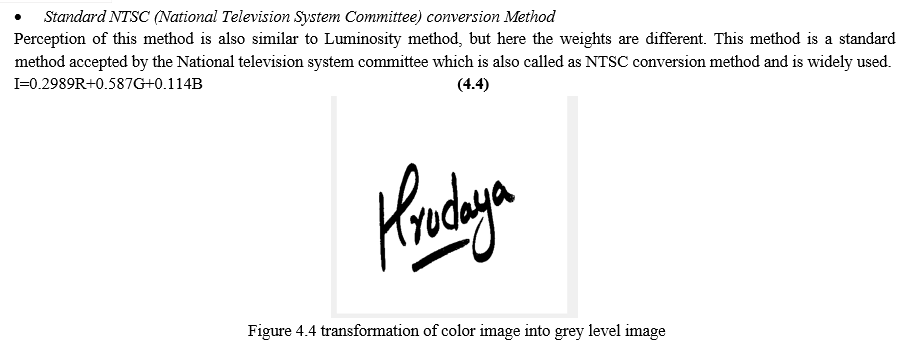
In The shades of colour for the image consists of three types of colour planes they are red which is denoted by r, green which is denoted by g, and red which is denoted by r .In a color image, every pixel value is defined by the combination of the values of these three plans. In the level of grey, there is no information about which is about its colour .The image is defined by the pixel values of a single plan (the intensity plan). However, in a grey level image, the pixel values will have a range which is specified by the number of bits of the image. Example if we consider 8 bit image the range of pixel values varies from 0 – 255.
a. Conversion of Color image into Grey level image
Huge amount of various algorithms are there for changing the colour image to a grey level image.The following four algorithms are found to be more common in used:
b. Conversion of Grey level image into Binary image
An appropriate threshold value is noted down to change it from grey level image to a binary image . Let’s suppose if a grey level image is having a threshold which is higher the value than that of the new pixel value which is assigned is one else zero . Thus, the new image will have only two pixel values ‘1’ (which corresponds to white) and ‘0’ (which corresponds to black).
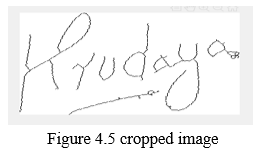
3. Cropping
When scanned, signature image contains the signature and some white cultured non-signature regions. Those superfluous non-image portions are removed by cropping the image to the bounding rectangle of the signature part. Cropping is a necessary pre-processing step for any type of techniques in this classification. Figure 4.5 shows one of the pre-processing techniques where the image is cropped to a bounding rectangle.
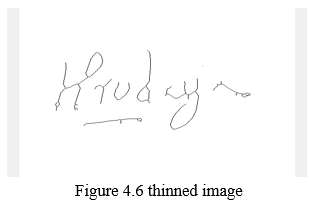
4. Thinning
In the signature image stroke are done one pixel thick. Thinning is prominently made to lessen the amount of data in the image . This inculcate to reduce the available space requirement as well as to decrease the complexities in further stages . But during thinning, some information of the signature images such as stroke width may be lost. So, depending on the features to be extracted, thinning may or may not be required. Figure 4.6 shows one of the pre-processing techniques where the image is thinned for removing the foreground.
5. Skeletonization
Skeletonization is applied on binary images. It maintains the bridging of the signature segment which are actually/natively connected and it selectively removes forefront pixels from the picture. After skeletonization, the signature picture is changed to combination of few thin arcs and curves . One of the methods to perform skeletonization is with the help of the morphological thinning process which selectively removes pixels from all over the boundaries . Hence this process goes on until no more thinning is feasible .
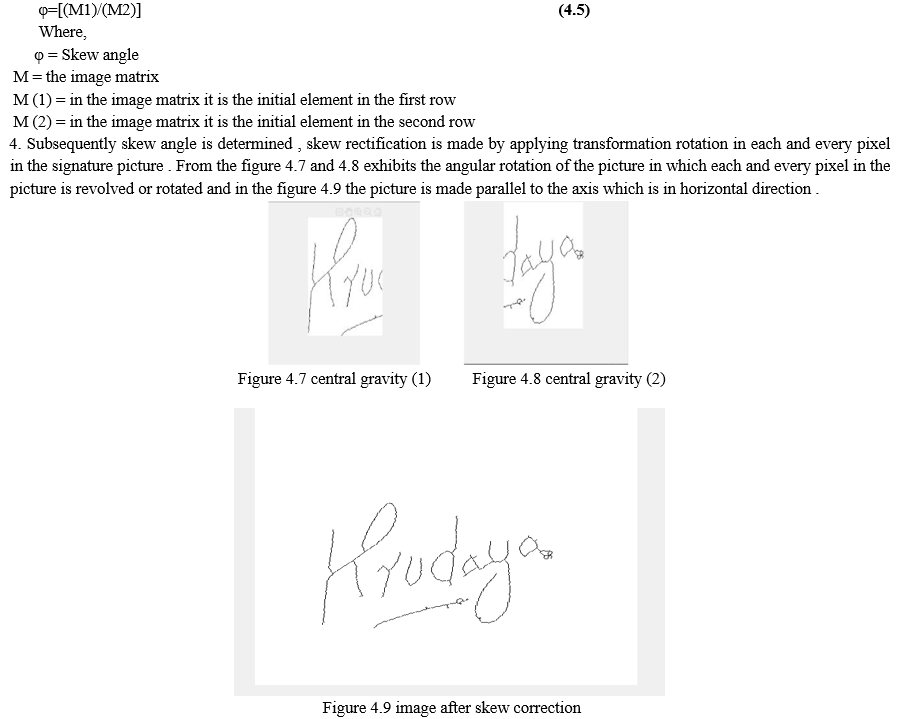
6. Rotation for Skew Correction
Many a times, it is seen that during scanning of the signature images, the images are not properly oriented .It is called skew . Skew may result poor classification (depending on the classification technique used). Therefore there may be a need for skew correction of the signature images by rotating them. In one method of skew correction, the bottom pixels of the signature image are used. Skew angle of this line is measured and then skew correction is done by rotating the signature image by a negative skew angle. These are the steps involved in skew correction:
a. Adjust the autograph to centre with the help of co-ordinates of centre of mass of the autograph image .
b. Calculate the minimum Eigen Value of the matrix formed by using the new co-ordinates of the signature image.
c. Calculate the Skew angle using the Eigen vector
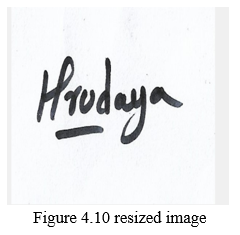
7. Resizing
Signature lengths are different for different signers. But when a grid based signature verification approach is used, the signatures are projected on the grid of same size. Thus each and every signature should be of similar size .Therefore in that case, resizing of signature becomes important but, resizing is not a compulsory pre-processing step for all signature verification approaches. In this method, there are two basic operations: (i) spatial transformation and (ii) grey level interpolation.
In spatial transformation, some pixels or points (‘tie-points’) are selected whose positions in the original image and the resized image are precisely known. From the two images , a different kind of equation is formulated . This equation is used as a mapping equation to find out the positions of all the pixels in the new resized image.
In the resized image the grey level interpolation is made to allot grey levels to the new pixels . It uses a nearest neighbour approach. In this method, grey level is assigned according to the pixel which is the nearest to the mapped pixel. Figure 4.10 shows one of the pre-processing techniques where the image is resized so that signatures projected are of same size.
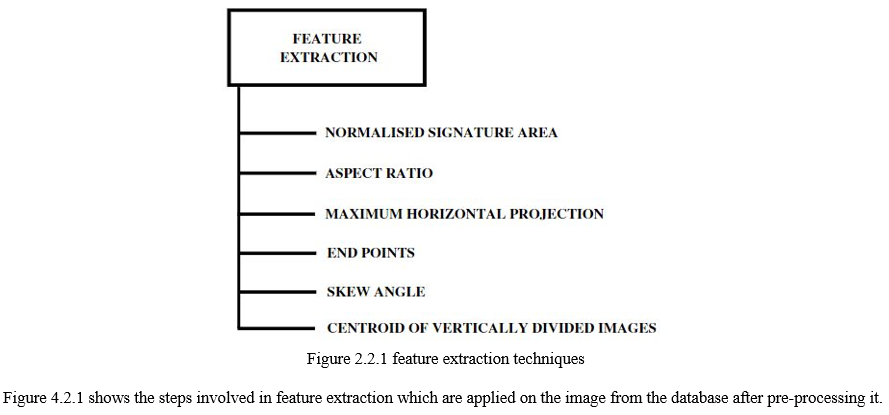
B. Feature Extraction
In image processing the main focal point of feature extraction is to obtain the most appropriate information from the input image. In the feature extraction, not only the important features are extracted, but also the surplus data is being eliminated. Converting the pictures to a set of features is known as feature extraction . Feature Extraction plays a vital role and it is helpful in many applications like data compression , recognition of an object , recognition of an pattern , etc.,
- Normalized Signature Area
The main cause of using normalized signature is to discern the ratio of number of black pixels to the total number of pixels in the input image . The main motive for finding out only the black pixels is, the track of the image is a black pixel. Determining out the number of black pixels would make feature matching implementation easier.
To determine the number following methods can be implemented such as, transmuting the image in to its negative and determining the number of pixels by the ratio among black and total number of pixels in the image. And the other is, the pixel is confirmed to be black if comparison with other intensity pixel is false .Determining the ratio among the obtained black pixels and total number of pixels results the area of black pixel. This is one of the feature extraction processes to obtain the ratio of black pixels in the image.
Normalized Signature Area = number of pixels which belong to the signature / total number of pixels in the signature image
2. Aspect Ratio
Aspect ratio gives the relation between the image’s width and height. Aspect ratio may vary in line with the application or in accordance with the processing method. There are many standard aspect ratios. There are two types of aspect ratios namely, PAR (Pixel Aspect Ratio) and DAR (Display Aspect Ratio) [8]. In the project, the image stored in the database is a square image. Display Aspect Ratio of a square image is 1:1. Aspect ratio can be helpful in cropping. The amount of cropping done on an image can be decided by having a specific aspect ratio according to the particular application that the image is being used. The aspect ratio can be calculated with two parameters height and width; these parameters can be obtained by size function in the mat lab which gives the size of the image.
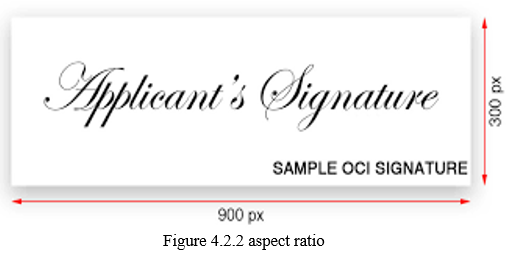
Figure 4.2.2 shows the aspect ratio which describes the width and height of the user’s signature.
3. Maximum Horizontal Projection
Maximum horizontal projection is to obtain the number of black pixels per a horizontal row of an image. The number of black pixels can be obtained by a piece of code comparing the reference pixel i.e., pixel of intensity value zero with all pixel intensities in the image and updating the count value. The other method to find black pixel is by using the mat lab function nnz. The nnz function [9] gives the number of zeroes in the matrix. By passing the input image as a parameter in the nnz function the number of pixels having intensity value of zero i.e., black pixels are obtained.
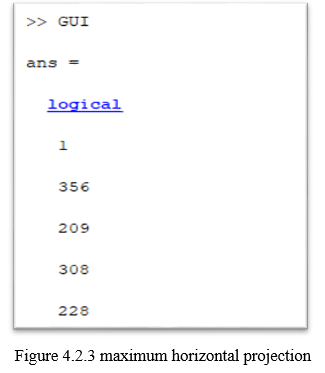
Figure 4.2.3 shows the number of black pixels per a horizontal row of the image from the database.
a. Maximum Horizontal Projection (Maximum horizontal histogram): In a horizontal projection, the row with maximum value gives the maximum horizontal histogram. Maximum vertical projection (Maximum vertical histogram): The highest value of the projection histogram in the vertical histogram is the maximum vertical projection.
b. Centre of Gravity or Centroid: In a binary signature image with black signature pixels, Centre of Gravity (CG) or Centroid is the average coordinate point of all black pixels.
4. Centroid of Vertically Divided Images
In a binary image or a black and white image with black signature pixels centroid is the average of all coordinate points of the pixel intensity with zero value.
Figure 4.2.4 the signature image is vertically divided into two halves. These halves have two centers of gravities of each respectively.
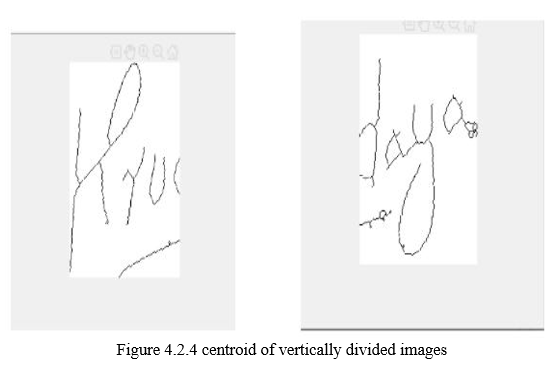
Figure 4.2.4 the signature image is vertically divided into two halves. These halves have two centers of gravities of each respectively.
5. Skew Angle
Skew angle is the angle between the normal plane of an image and the horizontal plane of the coordinate system. Skew angle aids to what amount the image should be rotated or shifted such that the image is properly aligned with the plane of coordinate system.
To align an image appropriate to the coordinate system, there three methods namely translation, rotation and scaling. Skew angle will categorize in rotation. There are two parameters to be known skew correction. The skewness of the image can be corrected by rotating the image at such an angle.
Many methods have been developed for the skew correction of images. Basically, they are using projection profile using Hough transform technique Fourier method by nearest-neighbour clustering and correlation. In the projection profile method, a series of projections are obtained at a number of angles close to the expected orientation, and the variation is calculated for each of the projection. The profile that gives the maximum variation corresponds to the projection with the best alignment to the text lines. This projection angle is the skew angle.
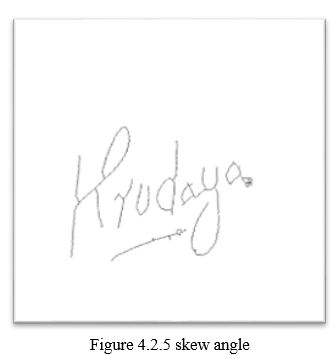
Figure 4.5 the signature image is rotated or shifted such that it is properly aligned with the plane of coordinate system.
6. End Points
The boundary pixels of an image are generally called as end points of an image. End points of an image can be detected by the neighbourhood of the particular pixel. There are three types, namely 4-neighbourhood, 8-neighbourhood and diagonal neighbourhood of a pixel. Edges can also be found out using neighbourhood. If an edge does not have right side elements it is said to be a corner edge. Correspondingly, the end points can be distinguished by neighbourhood. According to the coordinate location and neighbourhood condition of a particular pixel in an image, the end points could be detected.
Figure 4.6 the signature image’s boundary pixels are shown.
7. Number of cross points
In a skeletonized signature image, Cross point is a signature pixel or point that has more than two 8-neighbours. (When pixels are considered on a grid, a pixel is surrounded by 8-neighbouring pixels; they are called its 8-neighbours)
8. Choice of Features
While considering the choice of features in an offline signature verification system, following two aspects need to be considered:
a. Types of Features
Geometric Features
Graph metric features
Directional features
Mathematical transformations
Texture features
Interest point matching
Pseudo-dynamic features
b. Total Number of Features
In pattern recognition, feature selection is a process of selecting a subset of the most important and relevant features from the complete set of extracted features so that the total number of features is reduced but their class discriminatory information is still intact .All the extracted features carry information of the pattern from which they were extracted. But all of them don’t carry information about the pattern equally. In a feature set, some of the features are irrelevant or redundant. If the classifier is fed with the irrelevant features, there three problems may be induced by the irrelevant features:
(i) Due to more number of features, computational cost increases.
(ii) Presence of the irrelevant features may cause misclassification and thus the classification efficiency is decreased.
V. DECISION FOR AUTHENTICATION
The Decision for Authentication procedure passes through the feature space to find out the best feature subset. Various algorithms are used for the Decision for Authentication. Some popular search algorithms are: greedy hill climbing, Exhaustive, Best first, Simulated annealing, Genetic algorithm, Greedy forward selection, Greedy backward elimination, Particle swarm optimization, Targeted projection pursuit, Scatter Search, Variable Neighborhood Search etc. Following are some of the search methods available in WEKA data mining software which have been used in our research work.
A. Greedy Hill Climbing Search Algorithm
Only the local changes to a feature subset are considered in greedy hill climbing search algorithm. This algorithm [15] evaluates the resulted local changes in the present feature set by adding or removing one feature. The change which improves the score is chosen. A change made once for a feature subset is not considered again.
B. Best First Search Algorithm
The system backtracks after it encounters a pre-specified number of non-improving nodes. The search process may start from an empty set or from a full set of features or it may start from an intermediate point.
C. Exhaustive Search Algorithm
This algorithm [15] searches for every possible subset that scores a minimum specified threshold. Sometimes, under some special requirements this threshold may be set to zero. At a defined stopping point, the highest scoring subset is selected as the best subset. The stopping criterion may be minimum threshold score, a maximum allowed run time etc.
D. Ranker Search
This search algorithm [15] uses a single feature evaluator and sorts the features and the potential feature subsets are ranked.
E. Ranker
This is not essentially a search method. This is a scheme used to rank the individual features. It is used with a feature subset evaluator. Every feature is evaluated individually. There is another option to keep hold of some features not considering their rank.
F. Stop Point of Decision for Authentication
A search algorithm goes on adding (if it is using forward selection) or removing (if it is using backward selection) features by continuously checking the score based on classification error. Another way is to revise the feature subset continuously till its score doesn’t go down . Out of the different stopping criteria used to stop the search procedure, following two criteria are more commonly found to be in use: search stops when the minimum node size (minimum number of features) is reached and when the maximum tree depth is attained .
Conclusion
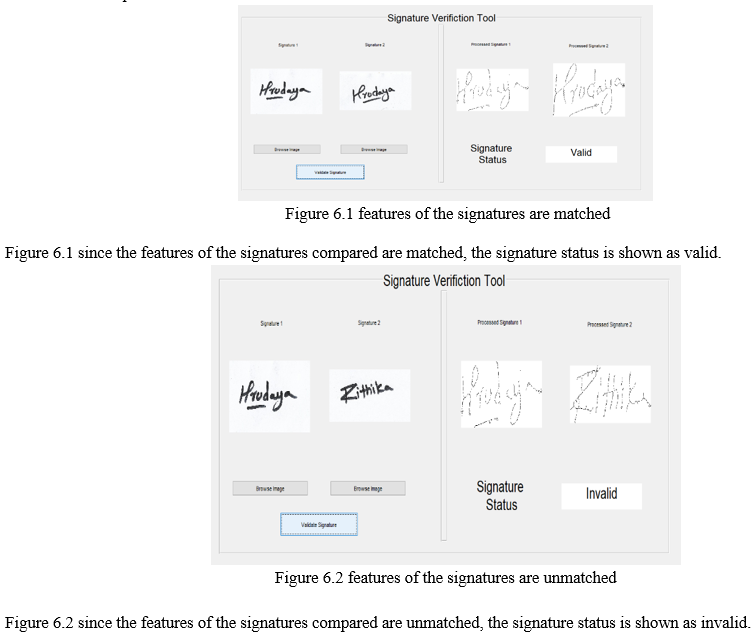
A novel signature verification method was introduced, which is able to preserve and take usage of semantic information during signature comparison. Experimental results are promising, even now, when the algorithm uses only a fragment of this semantic information. Therefore, an effective signature recognition and verification system has been built in order to draw a comparison between valid and invalid signatures. This system can be used in various applications like land documents, cheques, etc. to overcome forgery which takes place in huge number in day to day life. Our experiences show that tremor is a very typical feature for forged signatures. This tremor could be measured using a Fourier transformation for calculating the distance from the smoothed curves. Threshold values in our system could be refined by loading the results from the different feature evaluations into an expert system.
References
[1] K. Krishnaditya, K. Varun, and K. Mohit, “Handwritten Signature Recognition: A Convolutional Neural Network Approach”, International Conference on Advanced Computation and Telecommunication, Bhopal, India, 2018, pp. 1-5, doi: 10.1109/ICACAT.2018.8933575 [2] L. G. Hafemann, R. Sabourin and L. S. Oliveira, \"Offline handwritten signature verification — Literature review,\" 2017 Seventh International Conference on Image Processing Theory, Tools and Applications (IPTA), Montreal, QC, 2017, pp. 1-8, doi: 10.1109/IPTA.2017.8310112 [3] T. Islam and M. Fairhurst, \"Investigating an objective measure of writer hesitation for forensic analysis of the handwritten signature,\" 2016 4th International Conference on Biometrics and Forensics (IWBF), Limassol, 2016, pp. 1-6, doi: 10.1109/IWBF.2016.7449686. [4] S. Mushtaq and A. H. Mir, \"Signature verification: A study,\" 2013 4th International Conference on Computer and Communication Technology (ICCCT), Allahabad, 2013, pp. 258-263, doi: 10.1109/ICCCT.2013.6749637. [5] A. I. Al-Shoshan, \"Handwritten Signature Verification Using Image Invariants and Dynamic Features,\" International Conference on Computer Graphics, Imaging and Visualisation (CGIV\'06), Sydney, Qld., 2006, pp. 173-176, doi: 10.1109/CGIV.2006.52 [6] Y. M. Al-Omari, S. N. H. S. Abdullah and K. Omar, \"State-of-the-art in offline signature verification system,\" 2011 International Conference on Pattern Analysis and Intelligence Robotics, Putrajaya, 2011, pp. 59-64, doi: 10.1109/ICPAIR.2011.5976912. [7] I. Abroug and N. E. Ben Amara, \"Off-line signature verification systems: Recent advances,\" International Image Processing, Applications and Systems Conference, Sfax, 2014, pp. 1-6, doi: 10.1109/IPAS.2014.7043294. [8] U. A. Jain and N. N. Patil, \"A comparative study of various methods for offline signature verification,\" 2014 International Conference on Issues and Challenges in Intelligent Computing Techniques (ICICT), Ghaziabad, 2014, pp. 760-764, doi: 10.1109/ICICICT.2014.6781376. [9] O. o-khalifa, M. K. Alam and A. H. Abdalla, \"An evaluation on offline signature verification using artificial neural network approach,\" 2013 INTERNATIONAL CONFERENCE ON COMPUTING, ELECTRICAL AND ELECTRONIC ENGINEERING (ICCEEE), Khartoum, 2013, pp. 368-371, doi: 10.1109/ICCEEE.2013.6633964. [10] B. Schafer and S. Viriri, \"An off-line signature verification system,\" 2009 IEEE International Conference on Signal and Image Processing Applications, Kuala Lumpur, 2009, pp. 95-100, doi: 10.1109/ICSIPA.2009.5478727. [11] M. Hanmandlu , A. B. Sronothara and S. Vasikarla , \"Deep Learning based Offline Signature Verification,\" 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York City, NY, USA, 2018, pp. 732-737, doi : 10.1109/UEMCON.2018.8796678. [12] D. R. Kisku , A. Rattani , P. Gupta and J. K. Sing, \"Offline signature verification using geometric and orientation features with multiple experts fusion,\" 2011 3rd International Conference on Electronics Computer Technology, Kanyakumari, 2011, pp. 269-272, doi: 10.1109/ICECTECH.2011.5942000. [13] R. E. Twogood and F. G. Sommer, \"Digital Image Processing,\" in IEEE Transactions on Nuclear Science, vol. 29, no. 3, pp. 1075-1086, June 1982, doi: 10.1109/TNS.1982.4336327. [14] S. Vanjimalar, D. Ramyachitra and P. Manikandan, \"A Review on Feature Selection Techniques for Gene Expression Data,\" 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Madurai, India, 2018, pp. 1-4, doi: 10.1109/ICCIC.2018.8782294. [15] K. Naidu, A. Dhenge and K. Wankhade, \"Feature Selection Algorithm for Improving the Performance of Classification: A Survey,\" 2014 Fourth International Conference on Communication Systems and Network Technologies, Bhopal, 2014, pp. 468-471, doi: 10.1109/CSNT.2014.99.
Copyright
Copyright © 2022 K. Priyadarshini, Nisanth Sai. A, P. Sai Krishna, Dr. Shruti Bhargava Choubey. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40948
Publish Date : 2022-03-23
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online