

Ijraset Journal For Research in Applied Science and Engineering Technology
Sky Cultivation Using Remote and Solar Power Source
Authors: Y. Shivani, A. Navya Sri Goud, V. Sathvik Phanindra, T Swapna
DOI Link: https://doi.org/10.22214/ijraset.2022.44164
Certificate: View Certificate
Abstract
How to grow more food in less space with less water is the main concept involved in this project work. The former who doesn’t have more land can adopt this system by which more land can be created to produce more food than existing land. Rolling type of sky container garden concept is presented here which can be exposed to the sun with water and fertilizer feeding accessibility.A mini module of giant wheel structure is constructed with 8 compartments for cultivating the crops, the idea of choosing this kind of mechanism is to grow more crops in less ground place/area. This rotary type of multi soil containers attached to the main structure of wheel mechanism operates on a simple wheel mechanism that can minimize the ground area or volume required for cultivating the food items like vegetables, grains, etc. The wheel mechanism is attached to the shaft of high torque DC motor at its centre point at certain height, now this motor is controlled through a remote control unit designed with RF modules and mini embedded systems. The control circuit built with 89C2051 chip & relays is designed to rotate the wheel either in clock wise or in anti-clock wise such that hanging containers attached to this mechanism can be positioned to the ground level accessible point for watering and other maintenance activities. Hanging containers filled with soil are constructed with acrylic sheets. Since it is a prototype module, the basic concept of 8 hanging type of small soil containers are used and are attached to the moving wheel for demo purpose. But for real time applications giant wheels can be constructed with less expenditure. The structure of mechanism occupies very less ground place such that the vacant place also can be used for cultivation. Solar energy is used to drive the wheel, for this purpose, 10W panel is used and its output is used to charge the battery such that in absence of Sun also the mechanism can be activated.
Introduction
I. INTRODUCTION
By 2050, the world’s population is expected to grow to 9.7 billion people, and feeding it will be a huge challenge. Due to industrial development and urbanization, we are losing arable lands (suitable land for growing crops) every day. In 2015, scientists reported that the Earth had lost a third of its arable lands over the previous 40 years. We don’t know how much more we are going to lose in the next 40 years. Increasing food demand due to a growing population along with ever decreasing arable lands poses one of the greatest challenges facing us. Many believe that vertical farming can be the answer to this challenge. Is vertical farming the future of agriculture, if so which is the best solution or best design? Many people believe that they can grow their crops over their building roof top; this culture became very popular because many people adapted this technique. But the major drawback of this system is maintenance would be very difficult and in addition we cont pore more soil over the roof because it cont except excess weight. In this regard here a unique concept is presented such that the technology of automatic rotating giant wheel structure is implemented for the ease of easy maintenance and more sky space. The utility model constructed here is known as a Ferris wheel farm, and solves food crisis caused by population crisis & shortage of farmland. The Ferris wheel agriculture method can be characterized in that the Ferris wheel farm is a type of greenhouse cultivation when the soil containers are covered with glass chambers. (Since it is a prototype module this facility is not made in this demo module). The soil containers arranged in the rim of the ferris wheel and conducts vertical circulation motion, it is called a sail transmission system or circulation system, also it is known as a moveable planting frame. When soil trays are covered with glass cabins, it can be said as a microclimate planting cabins. In this method, no need of using pesticides and produces the organic food products.Along with the surge of population and the raising of the level of consumption, human demand to earth resource is more and more, and the per capita cultivated land is fewer, and the world food problem is very severe. Food shortage, provision price rise, hungry, etc, may increase the crisis in future. Having a large population in a small area is the fundamental realities of the country of China & India. To solve above-mentioned by population crisis, leave the land uncultivated due to the deserts & drought areas, crisis in food that agricultural pollution, and climate change problems, the invention presented here discloses a kind of Ferris or giant wheel farm. The present invention's technical scheme that is adopted in the system is soil containers attached to the wheel rims, here two wheels are required and they must be attached to a fixed strong metal stand through an axel type of mechanism.
II. PROPOSED System
The proposed system makes use of the Ferris Wheel Mechanism and the Radio Frequency communication system. A ferris wheel is an amusement park attraction that consists of a big vertical wheel with seating or standing areas placed equally around the outside circle. The similar technique is used here, with the soil containers affixed to the wheel equally around the circle. The Ferris wheel spins on a horizontal axis, and the soil containers are alternately elevated and then lowered as they travel in a cycle around the wheel. The wheel may be remotely positioned wherever it is needed, and under this design, all containers can be brought to the ground level one after the other for maintenance services.The first designs of amusement ride wheels may have been based on big, circular wheels used to raise water for irrigation
A. Manufacturing Process
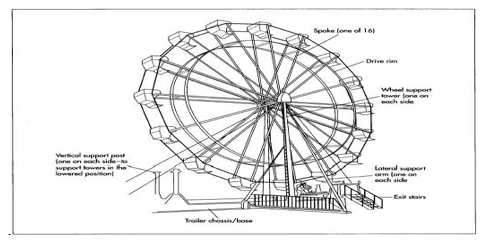
The manufacturing procedures used to construct ferris wheels vary depending on the wheel's design and the manufacturer. The majority of the components are constructed in various regions of the shop before being moved to the main construction area for final assembly. A typical sequence of activities for building a transportable ferris wheel used in carnivals and county fairs is shown below. In operation, the stated wheel is around 60 feet (18.3 metres) in circumference and can transport up to 48 people in 16 seats. Installing the towers
- 4 The two wheel support towers are built and painted elsewhere before being hoisted onto the chassis. The bottom ends are fastened to hinges on either side of the chassis, while the higher ends are supported by two support posts. Ladders are welded along one edge of the towers to give access to the electrical rings and brushes at the wheel hubs, as well as the electrical drive motors and wheels that spin the driving rim on either side. After that, the centre axle is fitted between the wheel hubs at the summits of the two towers.
- 5 On either side, about midway down the length of the tower, a long hydraulic cylinder is placed between the chassis and the wheel support tower. When the Ferris wheel is being put up for operation, these hydraulic cylinders are utilised to elevate the towers into an upright posture. A pivot pin at either end holds the cylinders in place.
- 6 Each wheel support tower has a separate lateral support arm attached towards the top. These arms are made up of two sections of square tubing, one of which is slightly smaller in cross section than the other and slips within the other. When the wheel support towers are raised for use, the lateral support arms are drawn out to the side and the inner part of each is extended and secured with a pin.7 .
- 7 Hydraulic and electrical cables are routed inside chassis frame sections for protection. The operator's control station has been installed and is linked. The chassis axles, brakes, tyres, wheels, and stabiliser jacks can be added now or after all other work is completed.
- 8 Installing the spokes Sixteen pairs of spokes extend from the tower tops' central hubs to the seats. To install the spokes in the factory, the first pair of spokes is set flat on the factory floor, followed by the installation of two crossmembers between the spokes.
- One crossmember is situated about 5 feet (1.5 metres) in from the outer end of the spokes, where the driving rims will be mounted. A set of curved drive rim portions are also fastened in place on either side at the same spot. Only one end of the drive rim parts is fastened together, leaving the other end unbolted. Repeat for the remaining spokes, crossmembers, and drive rim pieces until they form a stack. Each pair of spokes' inner ends are pinned
.
B. Description Of Radio Frequency Communication
Radio Frequency (RF) and wireless have been around for over a century, with Alexander Popov and Sir Oliver Lodge establishing the framework in the early twentieth century for Guglielmo Marconi's wireless radio innovations. Marconi's most famous experiment took place in December 1901, when he successfully broadcast Morse code from Cornwall, England, to St John's, Canada.Radio signal physics in generalRF communication works by producing electromagnetic waves at a source and then receiving those electromagnetic waves at a specific destination. These electromagnetic waves move at almost the speed of light across the air. An electromagnetic signal's wavelength is inversely related to its frequency; the greater the frequency, the shorter the wavelength.Radio frequencies are measured in kilohertz (KHz or thousands of cycles per second), megahertz (MHz or millions of cycles per second), and gigahertz (millions of cycles per second) (GHz or billions of cycles per second). Shorter wavelengths arise from higher frequencies. A 900 MHz gadget has a longer wavelength than a 2.4 GHz device.Ones with longer wavelengths go farther and penetrate deeper into and around objects than signals with shorter wavelengths. RF has become synonymous with wireless and high frequency communications, defining anything from AM radio between 535 kHz to 1605 kHz to computer LANs at 2.4 GHz. RF, on the other hand, has historically defined frequencies ranging from a few kHz to around 1 GHz. If microwave frequencies are considered RF, this range extends to 300 GHz.Radio frequency (RF) is the frequency, or rate of oscillation, of electromagnetic radiation between 3 Hz and 300 GHz. This frequency range corresponds to the frequency of alternating current electrical impulses utilised in the production and detection of radio waves. Because the majority of this spectrum is above the vibration rate at which most mechanical systems can respond, RF is commonly used to refer to oscillations in electrical circuits. There are three basic kinds of RF measuring methodology: spectrum analysis, vector analysis, and network analysis. The most common form of RF instrument in many general-purpose applications is a spectrum analyzer, which provides basic measuring capabilities. A spectrum analyzer, in particular, may display power-versus-frequency information and can occasionally demodulate analogue forms such as amplitude modulation (AM), frequency modulation (FM), and phase modulation (PM).Vector instruments include vector signal analyzers and vector signal generators. These devices analyse and create broadband waveforms, as well as extract time, frequency, phase, and power information from signals of interest. These devices are far more powerful than spectrum analyzers and provide superior modulation control and signal analysis. S-parameter measurements and other characterisation measurements on RF or high-frequency components are commonly performed by network analyzers. Network analyzers are devices that correlate both generation and analysis on several channels, although they are significantly more expensive than spectrum analyzers and vector signal generators/analyzers.We can see from the frequency spectrum that it is highly fractured and dense. This is one of the reasons why we are always pushing applications to higher and higher frequencies. Other factors influencing this shift to higher frequencies include propagation efficiency, immunity to certain types of noise and impairments, and the size of the antenna required. In practise, the antenna size is generally 14 wavelength, which is linked to the wavelength of the signal.This raises an intriguing topic. At low frequencies, data is often organised and easily represented; how can we represent or physically convert it to these higher RF frequencies? The human hearing range, for example, is 20 Hz to 20 kHz. According to the Nyquist theorem, sampling at 40 kHz or, more specifically, 44.1 kHz may entirely reflect the human hearing spectrum (this is where stereo audio is sampled). Cell phones, on the other hand, operate at roughly 850 MHz.This occurs because much of the research into RF and high-frequency measurements takes place in the frequency domain. This occurs because much of the research into RF and high-frequency measurements takes place in the frequency domain. There is a duality between time-domain functions and those expressed in frequency-domain functions. Shifting the human audible range to communicate via cellular frequencies. The most popular method for shifting frequency is mixing, which is comparable to multiplying your signal by a sinusoidal signal.Consider an RF transmitter wriggling an electron in one place. This wriggling electron creates a ripple effect, similar to dropping a pebble into a pond. An electromagnetic (EM) wave moves out from the starting point, causing electrons to wiggle in distant regions. This distant electron wiggle can be detected by an RF receiver.The RF communication system then uses this phenomena to express information by wiggling electrons in a certain pattern. The receiver may send this information to a remote place without the need of cables.Most wireless systems have two overarching constraints: they must function over a particular distance (range) and send a specific quantity of data within a certain time frame (data rate). The system's economics (pricing) must then be worked out, as well as government agency permissions (regulations and licensing).To correctly determine range, it is necessary to grasp a few terms: dB stands for decibels. Decibels are logarithmic units that are commonly used to indicate radio frequency power. When it comes to RF, line-of-site implies more than just being able to see the receiving antenna from the emitting antenna. No objects (including trees, homes, or the ground) may be in the Fresnel zone in order to have true line-of-site. The Fresnel zone is the area around the visual line of sight into which radio waves propagate after leaving the antenna. The signal strength will weaken if this region is not clear. When attempting to calculate range, there are essentially two characteristics to consider.
III. METHODOLOGY
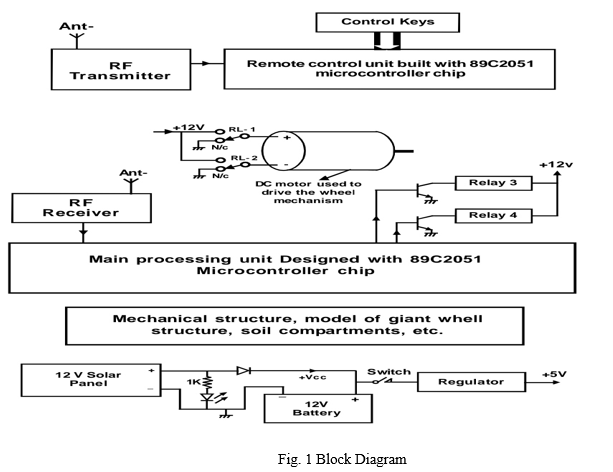
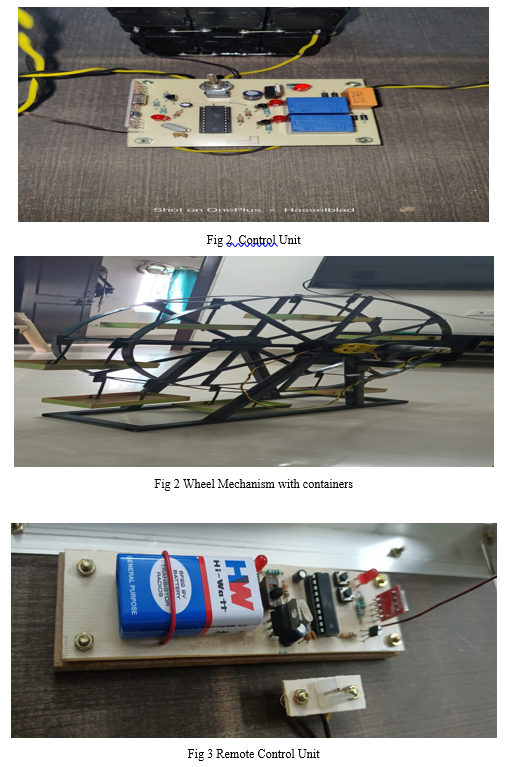
Because of the unique design of a ferris wheel, most of the component parts are fabricated by the manufacturer. Steel is the most common raw material and is used to make the trailer chassis, wheel support towers, wheel spokes, and wheel cross members. A variety of structural steel shapes are used depending on the application. Here in this project work for demo purpose, one small Ferris wheel of 20” diameter is constructed with MS (Mild Steel) rims and to maintain gravity, wheel rim driver mechanism is constructed with spur gears is arranged exactly at centre point of the wheel. 8 Small hanging type plastic containers are used as plantation cabins or trays. These trays attached to the rim remain in horizontal condition always irrespective of Ferris wheel position. To have a mechanical link between the wheel driver mechanism and rims, metal spokes are used and are welded carefully.The drive rims are rolled through high torque DC motor, for this purpose low speed DC motor is used. This motor built-in-with reduction gear mechanism reduces the speed and increases the torque. Since the rolling mechanism contains two equal size rims and both must be attached to each other, axel rod mechanism constructed with spur gears and bearings coupled with motor shaft is used to roll the wheel. The motor control circuit is constructed with 89C2051 microcontroller chip and the motor is driven through relays. With the help of a remote control unit constructed with another 2051 controller chip, motor can be rotated in both directions by which wheel can be rotated either in clock wise or in anti-clock wise to access the nearest plantation tray. The wireless communication system is constructed with RF modules, for this purpose, synchronized type of matched pair 433Mhz RF transmitter & RF receiver is used. The following is the detailed description of wheel control circuit.The process or functional description begins with the Remote control unit. This unit designed with 89c2051 microcontroller chip is programmed such that it generates 2 different command codes according to the activated control keys. These 2 control keys are interfaced with the microcontroller as input information source keys, whenever any key is activated, its corresponding digital code in 8 bits will be generated and delivered through its data output pin. In this IC, pin no. 3 is the data transmitting pin. Likewise the chip is programmed to generate 2 different codes and depending up on the activated key the chip can identify it, because that particular key input pin will be grounded momentarily. As the processing chip is aimed to encode the data, internally it generates 8-bit code in the form of 1s and 0s.The output of controller chip is fed to the input pin of RF transmitter. This device generates a high frequency of 433MHz which is used as carrier frequency, now the controller output (digital data) is fed to this high frequency as a modulated signal, this signal mixed with carrier signal and delivers through antenna. When the signal is delivered through antenna, the digital signal will be super imposed over the carrier and transmitted as modulated signal, means the carrier holds the digital code signal and carries to its destination, i.e. receiver. The following is the description of RF communication system.An-RF module-(radio frequency module) is a small electronic device used to transmit and receive radio signals between two devices. In an Embedded system it is often desirable to communicate with another device wirelessly. This wireless communication may be accomplished through radio-frequency (RF) communication. For many applications the medium of choice is RF since it does not require line of sight. RF communications incorporate a transmitter & receiver.RF modules are widely used in electronic design owing to the difficulty of designing radio circuitry. Good electronic radio design is notoriously complex because of the sensitivity of radio circuits and the accuracy of components and layouts required achieving operation on a specific frequency. In addition, reliable RF communication circuit requires careful monitoring of the manufacturing process to ensure that the RF performance is not adversely affected. Finally, radio circuits are usually subject to limits on radiated emissions, and require testing and certification by a standardization-organization such as-the Federal Communications Commission(FCC). For these reasons, design engineers will often design a circuit for an application which requires radio communication and then drop in a pre-made radio module rather than attempt a device discrete-design, saving time and money on development.RF modules are most commonly employed in medium and low volume goods for consumer applications; the possibilities are numerous, and in this case, this system is utilised to remotely manage the electric car. Several carrier frequencies, particularly those in the Industrial scientific and medical (ISM) radio bands, are routinely utilised in commercially available RF modules, including 433.92-MHz, 915-MHz, and 2400 MHz. Because of national and international restrictions controlling the use of radio for communication, certain frequencies are utilised. Short-range devices may also use unlicensed frequencies such as 315-MHz and 868-MHz.An RF transmitter module is a miniature Printed Circuit Board Assembly PCB that can send a radio wave and modulate it to convey data. Transmitter modules are often implemented in conjunction with a microcontroller, which provides data to the module that may be communicated. RF transmitters are often subject to regulatory regulations that govern the maximum permissible transmitter power output harmonics and band edge limitations.The modulated RF signal is received and demodulated by an RF receiver module. The RF receiver utilised here is referred to as a regenerative receiver. Super-regenerative modules are typically low-cost, low-power devices that extract modulated data from a carrier wave via a succession of amplifiers. The frequency of operation of super-regenerative modules varies significantly with temperature and pressure.The receiver module used here receives the signal from transmitter through its antenna, demodulates the signal by which carrier will be eliminated and it is filtered to suppress the noise, with the help of a signal amplifier original signal will be strengthened and original code (Replica) will be generated as it is, therefore it is called as re-generative receiver. Any information either in the form of analog or digital, it can be transmitted and received as it is. As specified above, it is very difficult to construct these modules practically. Licensed modules readily available in the market are used to control the machine. As per the specifications offered by the manufacturer of these modules, the range is defined as 150feet in open air and 100feet in closed concrete buildings. The main processing unit is designed with another 89C2051 microcontroller and it is programmed to perform various functions. The primary function is to decode the data that is received through RF receiver, depending up on the command code received from remote control unit it is the function of this programmable chip to drive the DC motor through motors driver circuit designed with relays. As the motor is supposed to be rotate in both directions, two relays are used to change the motor supply polarity. If one key is activated from the remote motor rotates in forward direction, similarly if another key is activated in the transmitter, the motor rotates in reverse direction by which the wheel be rotated in anti-clock wise.The prime use of micro controller in the receiver, which is supposed to control the Ferris wheel according to the data acquired from RF receiver, it is the main function of the controller to control DC motor. Initially the process begins from the transmitting section (remote), depending up on the control signals or command code in the form of 8-bit binary code produced by the micro controller 89C2051 in remote control unit, the received data in wheel control circuit will be decoded and wheel will be controlled accordingly. Whenever any key is activated in remote control unit, corresponding code will be generated by the controller chip and this digital code will be fed to the RF transmitter for modulation, these signals are transmitted in the form of electromagnetic waves in all the directions. In the receiver section the RF receiver demodulates the signal and the demodulated data is fed to another 89C2051 controller. Here the micro controller is playing major roll, hence it can be called as main processing unit of the project work.
IV. RESULTS AND DISCUSSIONS
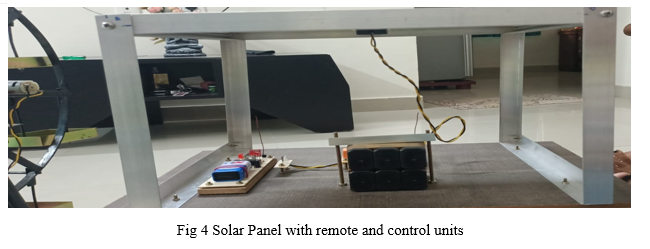
Following the completion of the project, we can conclude that the model of sky cultivation would be of great use to everyone as they can grow plants without the need of large lands and this model would also make it easier for the maintenance of crops like spraying fertilizers and pesticides waterning plants etc with the ferris wheel mechanism thereby increasing the yield of plants and promoting afforestation. The Ferris Wheel Model of sky cultivation employs the 89C2051 microcontrollers,Solar Panel and the RF modules as the main processing units.Due to the wireless radio frequency communication set up by the RF modules,the prototype works in the exact way as planned.The remote control unit has two control keys.On activating one key the wheel moves in clockwise directions and on activating another key the wheel moves in anti-clockwise direction.The solar panel also plays a major role in this project as the solar energy can be used to drive the wheel with the help of the charged battery in the absence of the Sun. Therefore the giant wheel model of sky cultivation is working efficiently as planned without causing any trouble,
V. FUTURE SCOPE
In the near future, in order to bring out a better version of the model presented, We would be adding glass covers over the 8 contains of the giant wheel in order to bring in the phenomenon of greenhouse effect. We would also plan on improving its mechanical design by making use of adequate gears and bearings. There is still room to improve in the system of control by giving more flexible control. A high torque DC motor can be used to improve the speed and efficiency of the model. In the immediate future, most vertical farms will focus on high-return, short-rotation crops like salad greens, with local restaurants frequently purchasing the whole harvest. Vertical farming will not totally replace traditional farming methods.
Conclusion
The goal of the project \"Less room, more crops\" outlined in this capstone project is to build a basic model of a Ferris wheel framework. Vertically revolving wheel structures are stunning examples of modern engineering that can be used for a variety of purposes. To demonstrate the concept in practise, a miniature prototype model of a huge wheel structure is built for live display and is operated by a high starting torque DC motor by spur gears. The wheel is operated by a remote control device, and the results are satisfactory.We engaged a few experts who are knowledgeable in Mechatronics when designing and creating this prototype module, particularly when manufacturing the mechanical elements. These professionals, who work for various firms in Hyderabad, assisted us in fabricating the mechanism. The remaining electrical and electronic components, with the exception of mechanical elements, are readily available. Because it is a prototype module, little money is invested; the entire machine is built with locally available components; in particular, the pieces of metal used in this project are procured from mechanical assemblers, and they are not up to the task; therefore, several more design modifications are required to make it a real working system. As a result, the machine will be improved further in order to achieve greater outcomes.Vertical farms in urban areas are a relatively new phenomena, but interest in this technique is growing, and the number of vertical farms in the United States is increasing year after year, while it is still in the experimental stage in India. Several vertical farm versions are being tested across the world, and new technologies and technology will almost certainly boost the energy efficiency and profit margins of these farms in the future.
References
[1] Ajo Eldho Baby, Aphsana Salim, Rose Mary Benny, Riya Kuruvilla, Dr. Jinsa Kuruvilla: Automatic farming robot for smart and effective cultivation: International Research Journal of Engineering and Technology (IRJET) volume 06 Issue-June 2019. [2] Amrita Sneha. A, Abirami.E, Ankita. A, Mrs. R. Praveen, Mrs. R. Srimeena: Agricultural Robot for Automatic Ploughing and Seeding: IEEE International Conference on Technological Innovations in ICT 2015. [3] A.O. Hannure: Automation in Seed Planting : International Journal of Advance Research in Science and Engineering (IJARSE) Vol 5, 2018. [4] Gowtham Kumar SN, Anand G Warrier, Chirag B Shetty, Gerard Elston Shawn D’souza: Multipurpose Agricultural Robot: International Research Journal of Engineering and Technology (IRJET) Volume 06 Issue- Apr 2019. [5] Nagesh B. Adalinge et al: Development of Seed Sowing Machine: International Journal of Engineering and Technology innovation(IJETI) December 2019. [6] P.Usha, V. Maheswari, Dr. V. Nandagopal: “Design and Implementation of Seeding Agricultural Robot”: JIRAS Oct 2015. [7] Sachin Bharath jagpath, Saurav Mohan Bhosle, Vishal Atul Deshmukh, Gavin Madhukar Deshpande: Multipurpose agricultural robot: a multidisciplinary peer reviewed journal: March 2018. [8] Shiva prasad B: Innovative Agricultural Robot: International Journal of Advanced Research in Computer and Communication Engineering (IJARCCE) Oct,2017. [9] Swapnil Arun Baviskar, Prashant Mallaiah Kawre, Abhor Ashokrao Hormone, Nitin Dhanaji Aladar, Mrs. Rupali S. Shinde: Multipurpose Agriculture Robot Using Solar Energy: International Research Journal of Engineering and Technology (IRJET) Volume 07 Issue-06 June 2020. [10] Swati D.Sambare: New Trends in Agriculture of Robot: International Research Journal of Engineering and Technology(IRJET) 2019.
Copyright
Copyright © 2022 Y. Shivani, A. Navya Sri Goud, V. Sathvik Phanindra, T Swapna. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44164
Publish Date : 2022-06-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online