

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart Luggage System
Authors: Abhishek Jagtap, Ashutosh Kabra, Jayaprakash Dharmavaram, Shital Raut
DOI Link: https://doi.org/10.22214/ijraset.2022.48129
Certificate: View Certificate
Abstract
For ages humans have travelled to different places in the world and have required luggage for supplies of goods and other things. To make the travel experience of people better day by day new technologies are coming up. Going back to luggage being made of leather and stuff to now luggage’s being smart luggage, technology is growing adversely. In this paper we would be talking about the smart luggage system in which we would be aiming to solve difficulties faced by people while carrying luggage.
Introduction
I. INTRODUCTION
To make the people's journey comfortable, newer and newer technologies are coming up as we already know. In this paper we would be talking about the smart luggage system in which we would be aiming to deal with the difficulties faced by people and much more. There are many difficulties faced by people in carrying their luggage like stacking of telescopic handles where the passenger has to lift the heavy load by himself thus making his travel experience worse. In places like India, people carry heavy luggage and have to struggle to carry them from places and so to deal with these problems faced by people we have come up with this prototype.
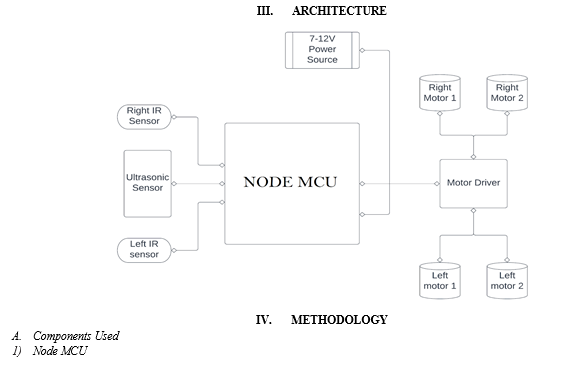
In this model, we have provided two features for the ease of the passenger:1)automatic decision making luggage and 2) mobile controlled luggage which can be used alternatively based on the user's choice. Automatic decision modules make decisions by using sensors. These sensors send The information to nodeMCU and instead convey the message to the motors and wheels through the help of the motor driver. More about this would be discussed in the methodology. Also for mobile control or manual mode we have used the functionality but used blink app for controls of the luggage or vehicle.
II. LITERATURE REVIEW
Up to this point, a lot of research has been finished on this kind of robot that comes into the category of the "Human Assisting Robots". People have used different kinds of algorithms and logic to Implement their design ideas. The primary focus was to develop a robot that follows a human/ target. In addition, some research work is also available regarding WIFI or Bluetooth controlled robot cars using IoT. In research of P.L. Sanathana Krishnan, Smart Luggage carrier system with [1] theft prevention and real time tracking using nano Arduino structure was developed, goal was to reduce human efforts of carrying luggage and security concerns. An automated luggage carrier which is compact and lightweight, follows its user wherever they go with the help of signals transmitted by the smart watch he/she is wearing. By this process the luggage can be easily transported autonomously or manually by choice.
Researchers have used different types of sensors for the detection process like a [2] laser sensor to detect the motion of legs and camera module is used to find the person in front of the system. On the other hand, a distance sensor, that is an Ultrasonic sensor, is in use to detect the distance between human and the robot so that a specific distance [3] robot can follow its user behind it. The sound waves emitted by the ultrasonic sensor and get received by the sensor again after getting reflected from humans.
As for the research (Amit K. Sharma, 2021), the researchers build a human following robot which is capable of following humans autonomously in a certain range. It uses [4] Ultrasonic sensor and IR sensor for human following. Ultrasonic sensor is basically a device used to measure the distance of a target object by emitting ultrasonic sound waves which get reflected after hitting an object and are received back Mostly human following robots contain different types of sensors like Ultrasonic, IR, [5] RFID, camera, ranging sensors, wireless transmitter and receiver, laser, etc. for recognition and detection of target. The capability of robots to follow moving objects can be used for various purposes like automated luggage carrier suitcases as well .
Wi-Fi control robot using Node MCU (R. K. Mistri) used Wi-Fi technology to operate the robot remotely using [6] ESP8266 Wi-Fi module and Arduino UNO development boards. Blynk app is getting in use to operate robots manually via android phone. Blynk is an android application where we can design interfaces according to our requirements.
Also, the robot car can be operated using voice command and these commands can be accessed using an app which converts voice into text. By voice command and manual mode the robot is able to move left, right, forward and backward. Ultrasonic sensors, the Global Positioning System (GPS), the Global System for [7] Mobile Communication (GSM), a Bluetooth module, a mobile application, and a power bank are the methods employed in this work. Even the locking mechanism uses fingerprints. It lacks a theft prevention system. The user's phone and the bag are both connected to the Bluetooth module it possesses. They each receive a power bank to charge their own devices. The bag may not always follow the owner because just ultrasonic sensors are being used. It might even follow another person as well. If the bag is misplaced, the Global System for Mobile Communication (GSM) and GPS will be able to find it, but only within Bluetooth range.
They employed a solar cell and [8] Radio Frequency Identification technique in this research (RFID). The solar cell, which is fastened to the bag's front portion, recharges the battery. This allows for the charging of smartphones. It has a Liquid Crystalized Display (LCD) screen that shows the users the schedule. It contains a warning system that notifies the user if there are any more books kept in the bag. Radio Frequency Identification (RFID) tracking is an extremely laborious process and is not recommended. It mostly benefits day students in schools and colleges. The bag is not commonly used because it is linked to a Bluetooth module. The benefits include an alarm system and the ability to trace kidnapped individuals. The drawback is that solar cells won't always be useful.
Here, a Global Positioning System (GPS) module, an alarm, and an Arduino board—to which all other parts are connected—are employed as the technique. In the event that the bag is misplaced, a map is built and synchronized to trace its location. The alarm informs the user that the object has left its owner's line of sight. The alarm's benefit is that it will make it easier for the bag's owner to locate and identify the bag. The drawback is that if the bags travel outside of the map area given to the server, they cannot be tracked. It is challenging to engage with an application when using Arduino. Due to the use of Arduino, the system will be exceedingly complex and difficult to use.
In this study, customers and their luggage are identified using radio frequency identification (RFID). Radio Frequency Identification (RFID) tags are affixed to luggage and included in traveller tickets. The consumers' bags are tracked by Radio Frequency Identification (RFID) scanners. There are three levels of testing in this case: unit testing, used to provide a system free of errors, system testing, used to determine whether the work is harmonious and compatible with one another, and acceptance testing, the last testing stage, which is then recommended to users and stakeholders. It can only be put into practice[10] in airports. It is applicable to every place in the airline's network.
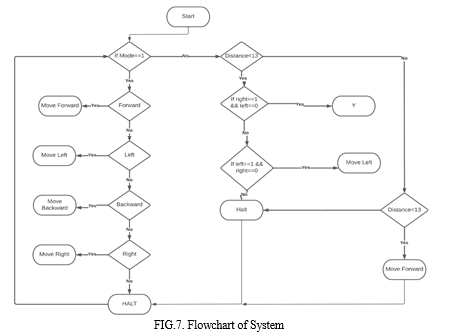
Above flowchart shows the decision making of /working of our model .It has two modes i.e. human following mode(0) and a remote control car robot(1).When it is mode(1) we can control our car remotely through our mobile using Blynk app. We need to connect our nodeMCU to internet for the connectivity between our WIFI module and Blynk server. Through Blynk we can change modes, adjust speed and control the car remotely as long as there is connection between nodeMCU and the Blynk server.
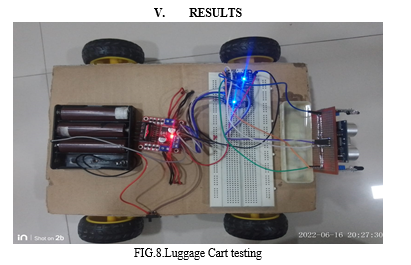
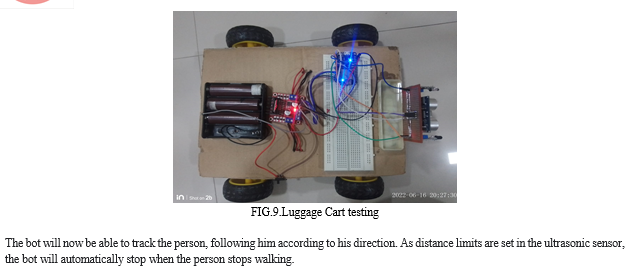
When it is in mode(0) our sensors come into play. When the distance calculated by ultrasonic sensors between robot and us is between 13 cm and 30cm our car will start following us in forward direction. And when it reaches below threshold of 13 cm it will make decision to stop or turn with the help of IR sensors.
Conclusion
As we know new things and new technology are being invented each and every day and this is a non-stop process. The proposed system highlights and focuses on auto and manual drive in which we have designed a smart luggage system that is reliable for transporting and carrying our luggage smartly. We have successfully built a prototype which is feasible for small scale but in the near future we would be able to build a model on a large scale which would solve all luggage related problems in a smart way using advanced technology. We can make our car GPS based so that it can follow us with the help of mobile GPS rather than using sensors. We can add utilities such as power banks, a small USB supported lcd touchscreen …etc to make our luggage system smart in true sense. GPS tracker so that we can track our luggage in case it is lost.
References
[1] P. L. S. Krishnan, R. Valli, R. Priya and V. Pravinkumar, \"Smart Luggage Carrier system with Theft Prevention and Real Time TrackingUsing Nano Arduino structure,\" 2020 International Conference on System, Computation, Automation and Networking (ICSCAN), 2020, pp. 1-5, doi: 10.1109/ICSCAN49426.2020.9262445. [2] D. F. Glas, T. Kanda, H. Ishiguro and N. Hagita, \"Simultaneous people tracking and localization for social robots using external laser range finders,\" 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2009, pp. 846-853, doi: 10.1109/IROS.2009.5354198. [3] A. K. SHARMA, A. PANDEY, M. A. KHAN, A. TRIPATHI, A. SAXENA and P. K. YADAV, \"Human Following Robot,\" 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), 2021, pp. 440-446, doi: 10.1109/ICACITE51222.2021.9404758. [4] Sowmya B J1, Supriya M2|Robot Controlled Car Using Voice and Wi-Fi Module |International Research Journal of Engineering and Technology (IRJET) |Volume: 08 Issue: 08 | Aug 2021. [5] P.L.Santhana Krishnan, R.Valli, R.Priya ,V. Pravinkumar ,”Smart Luggage Carrier system with Theft Prevention and Real Time TrackingUsing Nano Arduino structure” published in IEEE conference. [6] Afrin Khan, Bandini Nalwade, Neha Kharshinge, Sonali Kamble ,”SMART LUGGAGE SYSTEM” International Research Journal of Engineering and Technology (IRJET) ,2019. [7] Sebin J. Olickal, Amal Yohannan, Manu Ajayan, Anjana Alias, “Smart Bag (it can follow you)”, International Research Journal of Engineering and Technology, April 2017. [8] Shrinidhi Gindi, Irshad Ansari, Kamal Khan, Farooqui Bilal, “Smart Bag Using Solar and RFID Technology”, Imperial Journal of Interdisciplinary Research (IJIR), Issue 5 2016. [9] Sudha Senthilkumar, Brindha.K, Rathi.R, Charanya. R, Mayank Jain, VIT, Vellore – 632 014. Tamil Nadu, India, “Luggage Tracking System UsinG IoT. [10] [5] Deepti Mishra, Alok Mishra, “Improved Baggage Tracking, Security and Customer Service with RFID in Airline Industry”, Acta Polytechnica Hungarica, Feb. 2010.
Copyright
Copyright © 2022 Abhishek Jagtap, Ashutosh Kabra, Jayaprakash Dharmavaram, Shital Raut. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET48129
Publish Date : 2022-12-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online