

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart Surveillance Rover: Real-Time Monitoring with ESP32-CAM and Pan-Tilt Servo Motor Integration
Authors: Jitendar Gaikwad, Jyoti Madake, Aditya Jilla, Swapnil Pamu, Atharva Chavan, Amit Barde, Dipali Khatave, Sapna Wagaj
DOI Link: https://doi.org/10.22214/ijraset.2023.57362
Certificate: View Certificate
Abstract
This study delves into the development of a robot-guided vehicle using a Wi-Fi module and a mobile phone, with a specific emphasis on creating a discreet device for covert operations, serving as a portable espionage robot equipped with a wireless communication system. The spy robot incorporates crucial components, including a camera, motor drivers, batteries, and two mobile wheels. The implementation involves the AI Thinker ESP32-CAM module, which boasts an ESP32-S processor, OV2640 camera, and a microSD card slot for image storage. Video streaming is facilitated through the HTTP communication protocol, allowing users to access live video feeds from the OV2640 camera via a web browser. The web interface provides intuitive buttons for controlling the car\'s movements. The robotic car is assembled with two DC motors, a Robot chassis, and an L293D motor driver module, complementing the ESP32-Camera module. Vehicle operation is controlled by signals transmitted from the user\'s smartphone, while live streaming occurs through the camera mounted on the robot, with the user\'s smartphone receiving the live streaming data via the Wi-Fi wireless infrastructure.
Introduction
I. INTRODUCTION
As information technology progresses swiftly, video surveillance systems have gained widespread usage in our everyday routines, playing crucial roles in surveillance and security. Closed-circuit television (CCTV), a popular form of video surveillance, involves transmitting video signals from cameras to a restricted number of monitors. In its early stages, CCTV encountered challenges related to low video quality and expensive installation costs.[1] Another prevalent use is observed in dashboard cameras, providing video evidence for incidents like car accidents or vandalism.[2] CCTV is traditionally employed for monitoring specific areas such as banks and hospitals, where security is paramount. However, its coverage is restricted by its fixed location. In contrast, dashboard cameras, installed within vehicles, provide the advantage of recording while the car is in motion. Integrating both types of devices can enhance car tracking capabilities. CCTV, with its fixed location and superior hardware performance, proves highly effective in monitoring car movements within predefined areas.[3] Our proposed system aims to leverage the advantages of both conventional surveillance tools, providing an effective solution to tasks that are typically time-consuming and labor-intensive. For instance, in police investigations involving the movement of a stolen vehicle, the process often commences with the examination of CCTV and dashboard camera footage in the vicinity, expanding to a broader area as needed.[8] Our system simplifies this process by enabling users to generate queries based on car number, time of the crime, and location to ascertain the detailed trajectory of the stolen vehicle.[9] Furthermore, our system exhibits versatility in various applications, including traffic congestion analysis, optimal driving route searches, identification of access points and evacuation exits during accidents, and planning for new road construction.[4] We introduce a spy camera car system, an integrated video-based automobile tracking system that utilizes the ESP32-CAM module to merge a camera with a robot.[5] In addition to the ESP32-Camera module, the robotic car integrates two DC motors, a Robot chassis, and an L293D motor driver module to create a comprehensive surveillance robot vehicle capable of collecting real-time environmental video data for the user.[6]
II. LITERATURE SURVEY
V SHANKAR Intelligent Combat Robot 2015:[1] V SHANKAR has developed an intelligent combat robot designed for remote operation utilizing RF technology and a wireless camera for monitoring. The robot and camera can transmit real-time footage, including night vision capabilities, through a wireless network. This particular robot is designed for applications in war zones, especially for surveillance purposes. However, it's noteworthy that the operational range of this robot is limited to ten meters.
ROBOT WITH BLUETOOTH CONTROL:[4] A new classification technique has been introduced to enhance the range of a robot controlled via Bluetooth. Although the increased speed was achieved, there were challenges as the camera link frequently faced disruptions with this technology.
JOVITA SERRAO AND AWAB FAKIH - MOBILE OPERATED VEHICLE:[8] The concept here involves the remote or wireless operation of a vehicle by a human using an Android app, eliminating the need to be physically present inside the vehicle. The project includes a battery-powered car and a controller with Bluetooth connectivity. The system comprises a controller with a Bluetooth communication IC connected to the vehicle's motors and other components. When the Android app, linked to this system via Bluetooth, is activated, wireless commands from the app can control the vehicle. The operational range of Bluetooth for this system is approximately 10 meters or 33 feet.
DR. S. BHARGAVI AND S. MANJUNATH ELECTRONICS AND COMMUNICATION:[3] The research aims to mitigate human casualties in terrorist attacks, such as the one on September 11, 2001. A combat robot has been developed to address such heinous acts. This radio-controlled, self-powered robot is equipped with all controls typically found in a standard car. Additionally, it features a wireless camera for long-distance surveillance. The spy robot is designed for deployment in high-end hotels, shopping malls, and jewellery showrooms, where intruders or terrorists may pose a threat.
HEBAH H.O. NASEREDDIN AND AMJAD ABDULLAH ABDELKARIM:[2] In their experiment, Bluetooth technology is utilized to control a robot using a smartphone. The proposed experiment involves two modes: Direct Drive Mode (DDM), where the robot moves in all directions based on user requirements, and Map-Based Mode (MBM), where the user can draw an initial point, end point, and obstacles to calculate the shortest path. Users can choose between these two modes for wireless communication to control the robot.
III. METHODOLOGY
The foundational requirement for any robot is a structure or body to which its control circuits and actuators can be attached. In our design, the primary objective is to enable device movement in response to button commands. As a result, we have developed a straightforward robot capable of moving forward, backward, left, and right with the press of a button.
A. Components Used
- ESP32-CAM
- FTDI Programmer
- DC Motors (2)
- Motor Driver (L293D)
- Battery
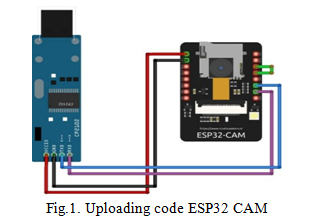
As the ESP32-CAM lacks a USB port, an FTDI board is essential for code uploading. The ESP32's VCC and GND pins are connected to the FTDI board's respective pins, and the Tx and Rx pins are linked accordingly. Two DC motors are connected to the ESP32 through the L293D module, with the module's pins connected to the ESP32's IO4, IO2, IO14, and IO15 pins as shown in fig.1.
The surveillance bot's ESP32-CAM module comprises an ESP32-S processor, an OV2640 camera, and a microSD card slot. Captured images can be stored on a MicroSD card. Video streaming from the OV2640 camera is facilitated via the HTTP communication protocol, accessible through a web server. The interface includes options for controlling the rovers movements.
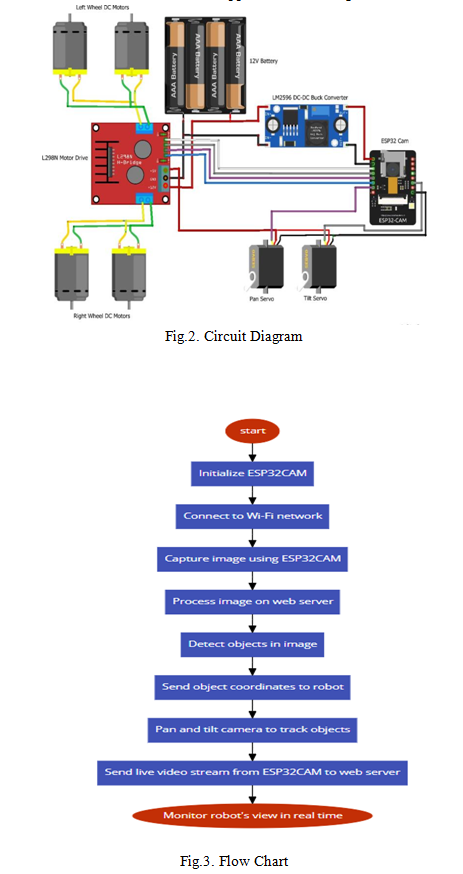
After code upload, disconnect GPIO 0 from GND, set a baud rate of 115200, and open the Serial Monitor. Press the RST button on the ESP32-CAM to display its IP address. Remove the FTDI programmer, reconnect the ESP32-CAM to the Pan/Tilt platform as shown in fig.2, turn on the power, and press the on-board RST button.
To enable live video transmission to the Android application, you should access your router settings and set up port forwarding. Specify the "Port Range" as 80-81 and select your ESP32-CAM device or its IP address, depending on your router. The captured live video from the camera is then transmitted to the Android application, allowing us to control the vehicle's movement.
A. Expected Outcomes
While these robots primarily provide live footage of scenes, they lack the capability to actively engage or provide information on various aspects. Nevertheless, their utility is extensive for analyzing diverse and potentially hazardous situations that may be inaccessible to humans. Instances such as mining accidents, urban disasters, and other scenarios often necessitate the use of remotely controlled surveillance robots. These robots play a crucial role in assessing damage, strategizing effective access points, and identifying evacuation exits to confront challenges and save lives. Human surveillance in sensitive areas, especially in war zones or adversary territories, involves skilled personnel constantly monitoring for changes. However, this method poses the inherent risk of personnel getting caught by adversaries. Technological advancements over the years have made it possible to remotely surveil critical areas using robots, reducing the risks associated with human surveillance. Certain regions may require temporary video surveillance, making it impractical to install stationary CCTV systems. Agricultural settings, for instance, may only need video surveillance when crops are reaching maturity, or pastures are occupied by roaming livestock. Moreover, areas like pastures, fields, and hills ideal for surveillance often lack a power supply. In agricultural contexts, the use of mobile video surveillance through Surveillance Robot Cars proves more advantageous than stationary surveillance systems. Mobile robots eliminate the need for expensive infrastructure, pole installation, or cable laying, making them a more convenient and cost-effective solution.
B. Application With Scope
In today's technological landscape, the presence of robots is imperative, emerging as an essential element for the future. Ensuring virtual safety has become a requisite in any situation involving technology.
C. Patrolling
Consistently patrolling the streets to ensure public safety and promptly alerting authorities when necessary.
The likelihood of receiving inaccurate or biased information is extremely low.
Efficiently identifying, gathering, and swiftly relaying information to authorities in case it corresponds to an individual's criminal history in the criminal database.
For example, if a criminal is evading capture, the robot can transmit a message to the police containing the last known location.
D. Application In The Military
Certain locations are designated for information gathering and monitoring, making the surveillance car bot an ideal choice. Through advanced enhancements, we can deliver real-time data and execute military actions as required.
E. Applications For Traffic
It can be employed for monitoring adherence to traffic rules, checking whether individuals are wearing helmets and seat belts.
In situations such as the COVID pandemic, the robot can also observe compliance with mask-wearing and social distancing measures.
F. Concerns About The Environment
Promoting cleanliness is emphasized, with online penalties implemented for non-compliance with established standards and littering in the surroundings. Utilizing short audio messages to remind individuals about adhering to regulations and maintaining a clean environment.
IV. FUTURE SCOPE
- In the ongoing development of the Surveillance Robo Car, there is a significant focus on advancing its capabilities to meet evolving security and surveillance needs. One key area of enhancement is the implementation of advanced autonomous navigation. By integrating sophisticated navigation algorithms and sensors, the robot gains the ability to autonomously navigate complex environments. This includes the capability to avoid obstacles seamlessly and optimize its path, ensuring efficient and reliable surveillance operations.
- Additionally, the integration of AI-based object recognition is a pivotal aspect of the robot's future development. Through the implementation of artificial intelligence, the Surveillance Robo Car can achieve real-time object recognition. This empowers the robot to identify and categorize objects and activities swiftly, significantly enhancing its surveillance capabilities and responsiveness in dynamic environments.
- Furthermore, the incorporation of machine learning is integral to the robot's continued evolution. By leveraging machine learning algorithms, the Surveillance Robo Car can continually improve its decision-making capabilities over time. This not only facilitates more accurate threat detection but also enables the robot to adapt effectively to different scenarios, making it a versatile and adaptive tool for surveillance applications.
- Exploring the potential of multi-robot collaboration is another avenue for advancement. The concept involves multiple surveillance robots working collaboratively to cover larger areas and share information. This collaborative approach enhances the overall efficiency and effectiveness of surveillance operations, providing a comprehensive and synchronized security solution.
- Energy efficiency remains a crucial consideration in the ongoing development. Implementing energy-efficient technologies, potentially including renewable energy sources and efficient power management systems, aims to extend the operational time of the robot. This ensures prolonged and sustainable surveillance capabilities, particularly in scenarios where extended deployment is necessary.
- Improving human-robot interaction is another key objective. Enhancements in this area involve refining the interaction between the Surveillance Robo Car and human operators. This includes the development of more intuitive control interfaces and advanced communication systems, fostering efficient data interpretation and seamless collaboration.
- The seamless integration of the Surveillance Robo Car with centralized command centers is a pivotal goal. Enabling real-time data streaming, monitoring, and control by security personnel enhances the overall security infrastructure, ensuring a coordinated and responsive surveillance system.
- Adaptability to various weather conditions and challenging environments is paramount. Enhancing the robot's capability to operate in scenarios such as extreme temperatures, heavy rain, or low visibility ensures reliable performance under diverse conditions.
- Cybersecurity measures are of utmost importance to safeguard the robot's communication channels and data storage. The implementation of robust cybersecurity protocols ensures the resistance of the Surveillance Robo Car to unauthorized access and tampering, preserving the integrity of surveillance data.
- Ultimately, customization for specific applications is a targeted objective. Tailoring the Surveillance Robo Car to meet the unique requirements of applications such as industrial security, border patrol, or disaster response involves incorporating features and functionalities that optimize its performance in each specific scenario. This comprehensive approach ensures that the Surveillance Robo Car remains at the forefront of technological advancements in the field of surveillance robotics.
V. RESULT
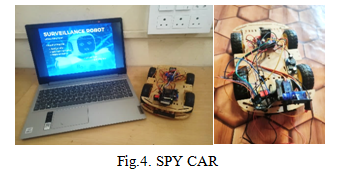
Our surveillance robot car has undergone comprehensive testing, revealing remarkable performance across key features. The pan-tilt mechanism demonstrated exceptional responsiveness, allowing the robot to swiftly adjust its viewing angle and capture a diverse range of perspectives [Image: Pan-tilt mechanism in action, capturing a wide range of perspectives].

Utilizing the ESP32-CAM module, the robot excelled in real-time monitoring, providing clear and uninterrupted video streaming through a web browser [Image: Screenshots showcasing real-time video feed with high clarity]. The directional movements of the robot were seamless, showcasing a prompt response to user commands for forward, backward, left, and right motions [Image: Images depicting the robot moving in different directions]. Incorporated obstacle detection sensors proved highly effective, enabling the robot to navigate through challenging environments with precision [Image: Robot successfully avoiding obstacles in its path]. The implementation of remote control via a smartphone showcased user-friendly operation, with efficient control of the robot's movements [Image: Screenshots of the smartphone app interface for controlling the robot].
Maintaining a stable connection through Wi-Fi, the robot ensured uninterrupted live streaming and responsive control signals [Image: Testing the robot's wireless connectivity in various environments]. The integration with an Android application seamlessly transmitted the live video feed captured by the robot's camera, enhancing the convenience of monitoring and control [Image: Android app displaying live video feed and control options]. In summary, our surveillance robot car has successfully demonstrated its capabilities in pan-tilt operation, real-time monitoring, directional movements, obstacle detection, smartphone-controlled operation, wireless connectivity, and Android application integration. These results affirm the reliability and versatility of our system, positioning it as an effective solution for security, surveillance, and remote exploration.
Conclusion
To sum up, the Surveillance Robot Car, enriched with pan-tilt capabilities and an array of cutting-edge features, emerges as a groundbreaking technological leap in the domain of security and surveillance. The inclusion of pan-tilt functionality enhances its coverage, enabling the robot to adeptly navigate diverse scenarios. The ESP32-CAM module facilitates live-streaming capabilities, complemented by a user-friendly web interface for seamless remote control. This amalgamation creates a fluid and responsive system for monitoring and addressing various situations. The integration of an intelligent control system, utilizing components like the FTDI programmer, Motors, and the motor driver, empowers the robot to execute precise movements in accordance with user commands. Beyond conventional surveillance applications, the Surveillance Robot Car showcases remarkable versatility. Its potential applications extend to critical scenarios such as mining accidents, urban disasters, and agricultural surveillance, showcasing its adaptability in addressing real-world challenges. The robot\'s capacity to transmit real-time data, conduct video surveillance, and navigate challenging terrains positions it as a valuable asset for enhancing safety and security. As technology undergoes continuous evolution, the Surveillance Robot Car signifies a paradigm shift in surveillance approaches, presenting an efficient, cost-effective, and adaptable solution for a broad spectrum of applications. Its ability to monitor traffic, enforce safety regulations, and respond dynamically underscores its pivotal role in creating a safer and more secure environment.
References
[1] Kim M., Kang K.C., Lee H. Formal Verification of Robot Movements - a Case Study on Home Service Robot SHR100. In the Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 4739-4744p, 2005. [2] Loukianov A.A., Kimura H, Sugisaka M. Implementing distributed control system for intelligent mobile robot. 8th International Symposium on Artificial Life and Robotics, Oita, Japan, January 24– 26 2003, [3] JIovine J. PIC Robotics: A beginner’s guide to robotics projects using the PIC micro. McGraw-Hill, 2004. [4] Khatun M.S., Zarrin J. Bluetooth Wireless Monitoring, Managing and Control forInter Vehicle in Vehicular Ad-Hoc Networks Helia. Department of Computer and Communication System Engineering, Faculty of Engineering, University Putra [5] http://www.electronicshub.org/remoteoperated-spy-robot-circuit/ [6] Butnaru T., Gi?rbacia F., Ti?rziu F., Talab D. Mobile Robot System Controlled Through Mobile Communications. Product Engineering, Springer, 2004. [7] Perotoni M.B., Garibello B.E., Barbin S.E. Low Cost Planner Antenna for a Mobile Robot. IEEE802.11, 2006 [8] Taipalus T., Kazuhiro K. Development of service robot for fetching objects in home environment. In the Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA), 451-456p, 2005. [9] Lenser S., Veloso, M. Sensor resetting localization for poorly modeled mobile robots. In the Proceedings of the International Conference on Robotics and Automation (ICRA), 1225–1232p, 2000.
Copyright
Copyright © 2023 Jitendar Gaikwad, Jyoti Madake, Aditya Jilla, Swapnil Pamu, Atharva Chavan, Amit Barde, Dipali Khatave, Sapna Wagaj. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET57362
Publish Date : 2023-12-05
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online