

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart Traffic Management System
Authors: Ashwani Dhar Dwivedi, Ashish Kumar Singh, Dr. Pankaj Kumar
DOI Link: https://doi.org/10.22214/ijraset.2023.53186
Certificate: View Certificate
Abstract
An efficient management system is imperative to address the frequent traffic congestion experienced at major intersections. This paper proposes the implementation of an intelligent traffic controller that utilizes real-time image processing. By employing various edge detection algorithms and object counting methods, the camera footage is analyzed to effectively manage the traffic flow. Previously, a matching method was employed, wherein cameras were installed alongside traffic lights to capture sequential image sequences. These images were then compared to a reference image depicting an empty road. However, in my paper, a filtering method is utilized instead. This method effectively filters out unwanted objects, focusing solely on vehicles, and accurately determines the number of cars present in each image. The software presented in my paper is specifically designed to process both images and videos. Its purpose is to be adaptable for future use in controlling traffic light signals. By considering the number of cars present in each direction, the software allocates sufficient time for each traffic signal, ensuring efficient traffic management.
Introduction
I. INTRODUCTION
Object recognition technology in computer vision is used to identify and select objects in images or video sequences, even when they vary in size, scale, rotation, or are partially obstructed. Traffic congestion is a growing problem, leading to accidents and other challenges. By foreseeing traffic patterns and spotting bottlenecks, Intelligent Transportation Systems (ITS) seek to resolve these problems[6]. However, computer vision systems still face difficulties in these tasks.
To detect and count vehicles on roads, traditional methods involve motion detection or laser installations, which can be complex and labor-intensive[4].
Alternatively, our paper proposes an image processing approach for vehicle counting, providing a smart traffic control solution. By utilizing filtering techniques instead of background subtraction, our method accurately counts cars in videos or images without requiring human intervention.
Overall, our methodology aims to automatically detect and count vehicles on highways, contributing to effective traffic congestion evaluation without relying on time-consuming hardware setups or manual intervention[3].
II. LITERATURE SURVEY
A. Edge Detection Techniques
- Edge
Edges are many times an assortment of bended line sections comprised of the places where a picture's brilliance suddenly changes. It is feasible to classify the edges that are separated from a two-layered portrayal of a three-layered scene as point of view ward or perspective free. An edge that is autonomous of the perspective as a rule reflects highlights that are intrinsic to three-layered objects, like surface stamps and surface structure.
Ordinarily mirroring the calculation of the scene, for example, objects impeding each other, a perspective ward edge might modify as the perspective changes. A commonplace edge may be, for instance, the line isolating a block of red from a block of yellow. Conversely, a line can be few pixels of an alternate variety on a generally constant foundation. For a line, there may in this way typically be one edge on each side of the line.
2. Steps In Edge Detection
a. Filtration: Each picture is related with some force values, arbitrary change in these qualities can bring about clamor. Some normal commotion is: salt and pepper clamor, drive commotion and so forth. Commotion can bring about hardships in powerful edge recognition; subsequently picture should be sifted to lessen the clamor content that prompts loss of edge strength [2]. It is likewise named as Smoothening.
b. Enhancement: Working on the nature of picture is named as improvement. It intends to create a picture which is preferable and more reasonable over unique. A channel is applied to improve the nature of edge in picture[5].
c. Detection: A few techniques are taken on to figure out which focuses are edge focuses and which an edge pixels ought to be disposed of as commotion. These means ought to be followed cautiously to distinguish the edges eff ectively, as the subsequent stages are exclusively subject to edges identified.
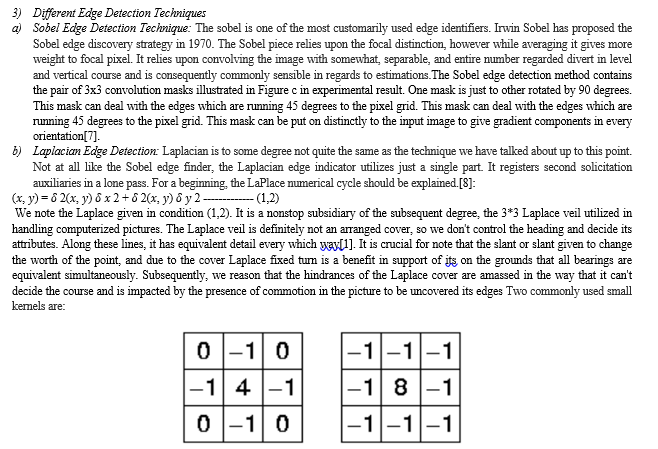
These veils are extremely susceptible to clamor because they approximate a second subordinate estimation on the image. To address this, the image is every now and again Gaussian smoothed before applying the Laplacian channel.
c) Canny Edge Detection: John Vigilant presented the watchful edge identification method at MIT in 1983. It is the norm, strong and typically utilized edge location technique. It isolates the commotion from the picture prior to removing edges. Vigilant is a superior technique for extricating the edges than other existing strategies and produces the great outcome. The Vigilant administrator have some control over various subtleties of edge picture and can stifle the commotion effectively. This strategy follows following advances:
- For smoothing the picture, the Gaussian channel is utilized with the distinguished worth of sigma which decreases commotion.
- At each point, the edge course and nearby slope are determined. According to the edge point, this is the slope course point with the highest local strength.
- The edge point increments edges in the angle picture greatness. In this calculation, top of these edges are thought of and gives no worth to all pixels that are not on the edges top. Then, at that point, as result, a slender line is created. This interaction is called non most extreme concealment.
Then, at that point, hysteresis thresholding is utilized here to edge the edges pixel. It has two limit values like T1 and T2.
- Case1: If T1>T2, the ridges' pixel value is greater than the threshold T2, indicating sharp edge pixels.
- Case2: If T2>T1, the ridges' pixel values are lower than the threshold T2, indicating a weak edge pixel.
- At Finally, the edge connecting process executes by coordinating the frail pixels that having 8-pixel network serious areas of strength for to.Initial two stages are extremely straight forward, note that in the second step we are additionally registering the direction of slopes "theta = arctan(Gy/Gx)" Gy and Gx are angle x heading and y bearing separately.Hysteresis is an approach to connecting the wrecked lines created in the past step.
This is finished by repeating over the pixels and checking in the event that the ongoing pixel is an edge. In the event that it's an edge, check encompassing region for edges. In case they have comparative bearing, we mark them as an edge pixel. We likewise utilize 2 limits, a high and low.
In the event that the pixels are more prominent than lower limit it is set apart as an edge. Then, at that point, pixels that are more noteworthy than the lower limit and are more prominent than high edge, are additionally chosen areas of strength for as pixels. We come to a stop when there are no more changes to the image.
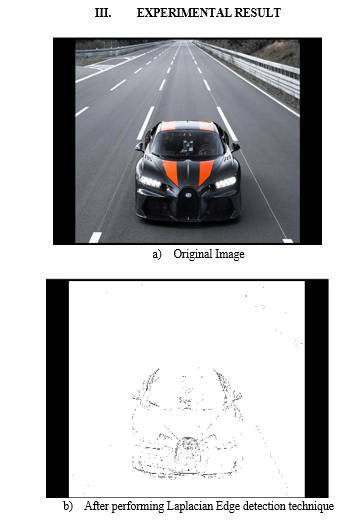
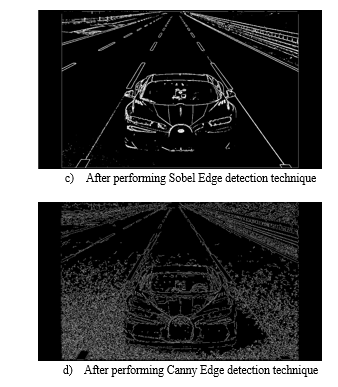
Conclusion
Since edge discovery is the underlying move toward object limit extraction and article acknowledgment, knowing the distinctions between various edge location operators is significant. In this paper an endeavor is made to survey the edge location strategies which depend on brokenness power levels. The general exhibition of different edge identification strategies is done with a picture by utilizing MATLAB programming. Vigilant outcome is better one when looked at than for a chose picture since various edge location work better under various circumstances. Regardless of such countless edges identification strategies are accessible in the writing, since it is a moving undertaking to the examination networks to recognize the specific picture without commotion from the first picture. As the future work, we can plan the new channel over the constraint to get better picture quality with the goal that the picture can be upgraded by diminishing the commotion.
References
[1] S. Das, “Comparison of various edge detection technique”, International Journal of Signal Processing, Image Processing and Pattern Recognition, vol.9, no.2, (2016), pp.143-158. [2] E. Nadernejad, S. Sharifzadeh and H. Hassanpour, “Edge Detection Techniques Evaluations and Comparisons”, Applied Mathematical Sciences, vol. 2, no. 31, (2008), pp. 1507 – 1520. [3] ] R. Maini and H. Agrawal, “Study and Comparison of Various Image Edge Detection Techniques”, International Journal of Image Processing (IJIP), vol. 3, issue 1, pp. 1-12. [4] Muthukrishnan.R and M.Radha “Edge Detection Techniques for image Segmentation” International Journal of Computer Science & Information Technology (IJCSIT) Vol3, No 6, Dec 2011. [5] S.Lakshmi and Dr.V.Sankaranarayanan “A study of Edge Detection Techniques for Segmentation Computing Approaches” IJCA Special Issue on Imaging and Biomedical Applications” CASCT, 2010. [6] Edge Detection by Trucco,Chapter 4 and Jain ct al.,Chapter 5. [7] Raman Maini and Dr. Himanshu Aggarwal “Study and Comparison of various Image Edge Detection Techniques” International Journal of Image Processing(IJIP),Vol3:Issue(1). [8] ] C. Solomon and T. Breckon, “Fundamentals of Digital Image Processing: A practical approach with examples in Matlab”, John Wiley & Sons, 2011.
Copyright
Copyright © 2023 Ashwani Dhar Dwivedi, Ashish Kumar Singh, Dr. Pankaj Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET53186
Publish Date : 2023-05-28
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online