

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart Turns: Revolutionizing Road Safety
Authors: Amruta Bhawarthi, Aashish Kapase , Sahil Kapase, Kapil Sangmeshwar, Ved Kapre, Bhakti Kapse, Yogita Kapse
DOI Link: https://doi.org/10.22214/ijraset.2023.55986
Certificate: View Certificate
Abstract
A technological replacement for traditional convex mirrors at blind curves and T-junctions is presented in the abstract of this research article. The suggested system makes use of ultrasonic proximity sensors to see oncoming cars and sends timely notifications to drivers on both sides of the turn. The technology also computes and shows the oncoming vehicle\'s speed. A typical signal system or direct roadside projection of the alerts are both options provided by the system. This approach facilitates safer navigation at blind bends and T-junctions by using proximity sensors to measure vehicle speed and improve driver awareness. Our method improves accuracy, range, and reliability in vehicle detection and alerting by overcoming the limitations of convex mirrors. This technology improves safer driving by enhancing driver awareness and reducing accidents.
Introduction
I. INTRODUCTION
Blind turns and T-junctions are hazardous areas on roadways due to limited visibility, leading to an increased risk of collisions. Traditional convex mirrors have been employed as a visual aid to enhance safety at these locations. However, such mirrors have inherent limitations, including restricted viewing angles and potential distortion. To overcome these drawbacks, an innovative technological solution is proposed to replace convex mirrors with an intelligent vehicle detection and alert system. The primary objective of this project is to provide real-time detection and alerts for approaching vehicles near blind turns and T-junctions, ensuring driver awareness and facilitating informed decision-making. By employing advanced vehicle detection technologies, such as sensors or cameras, the system can accurately identify the presence of an approaching vehicle. Once detected, immediate alerts are generated and relayed to drivers on both sides of the turn. The system incorporates a speed calculation feature to further enhance driver safety and situational awareness. By accurately estimating the speed of the approaching vehicle, the system provides valuable information to drivers on the opposite side of the turn, enabling them to gauge the potential risk and adjust their driving behaviour accordingly. Additionally, the alert system offers flexibility by providing two notification options. The traditional signal system utilizes visual indicators or audio alarms to alert drivers. Alternatively, alerts can be projected directly onto the road surface, improving visibility and reducing driver distraction. This adaptability allows for customization based on local infrastructure and driver preferences. The proposed system aims to address the limitations of traditional convex mirrors by offering enhanced accuracy, wider detection range, and reliable performance in identifying and alerting approaching vehicles. By providing real-time information about the speed of oncoming vehicles, drivers can make well-informed decisions, reducing the likelihood of accidents and improving overall road safety. It is a comprehensive study of an intelligent vehicle detection and alert system for blind turns and T-junctions. The system's innovative features, including accurate vehicle detection, speed calculation, and customizable alert options, are expected to significantly enhance driver safety in these critical areas. The subsequent sections of this paper will delve into the technical details, implementation, performance evaluation, and potential impact of this proposed solution.

II. METHODOLOGY
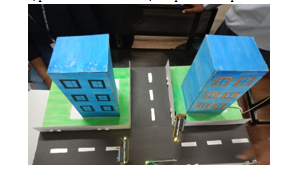
We have implemented a system of ultrasonic sensors, using 2-3 ultrasonic sensors to increase vehicle detection accuracy. Our proposed system utilizes proximity sensors, specifically ultrasonic sensors, to detect approaching vehicles near such turns. We used ultrasonic sensors as they can accurately detect the distance of the object in front of it. By attaching three sensors at predetermined distances before the turns, we can accurately capture the activity of the approaching vehicles.
We measured the distance from the sensor to the divider of the road and if any vehicle passes between the rays and the divider it is detected a trigger is generated. The system provides alerts to drivers on both sides of the turn, ensuring their awareness of potential oncoming traffic.
The ultrasonic sensors are placed at a certain distance to detect the incoming vehicle and store the data in the microcontroller (here we used Arduino UNO). The system calculates the speed of the approaching vehicle by analysing the time it takes for the vehicle to pass the three sensors. This speed information is then displayed on the other side of the turn, enabling drivers to have a comprehensive understanding of the approaching vehicle's speed.
We offer two options to alert drivers: a traditional signal system or the projection of alerts directly onto the road surface. This flexibility allows drivers to choose the method that best suits their preferences and provides maximum visibility. We used LCDs to display/announce the incoming vehicle.
III. RESULT AND DISCUSSION
The implementation of the vehicle detection and alert system using ultrasonic proximity sensors yielded positive results. As vehicles approached blind turns and T-junctions, all three sensors detected the activity and triggered the alert system, effectively notifying drivers on both sides about the approaching vehicles. The speed calculation algorithm accurately determined the speed of the vehicles by analysing the time it took them to pass the sensors, and the calculated speeds were displayed on the opposite side of the turn. Feedback from drivers involved in field trials was overwhelmingly positive, with drivers reporting improved awareness and safer navigation. Overall, the system effectively enhances driver safety by providing timely alerts and speed information locations.
Conclusion
We have presented a technologically advanced solution to replace traditional convex mirrors at blind turns and T-junctions. Though we have used ultra sensors in our project, the scope of ultra sensors being limited we suggest that IRs or MEMs are used in practice. IRs though have gained popularity may pose problems in case of excess light. When the light content is very high there are chances of the readings being distorted more so since these are to be used in open spaces where sunlight is prevalent. Micro Electromechanical systems (MEMs) are a better option. Another methodology which can be viable is the construction of electromagnetic-based speed breakers which will raise the trigger and consequently the signal when the vehicle passes over it.
References
[1] https://www.researchgate.net/publication/334652898_A_Study_on_Development_of_the_Camera-Based_Blind_Spot_Detection_System_Using_the_Deep_Learning_Methodology [2] https://www.sciencedirect.com/science/article/pii/S1877042813024154?ref=cra_js_challenge&fr=RR-1
Copyright
Copyright © 2023 Amruta Bhawarthi, Aashish Kapase , Sahil Kapase, Kapil Sangmeshwar, Ved Kapre, Bhakti Kapse, Yogita Kapse. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET55986
Publish Date : 2023-10-03
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online