

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart Wheelchair Based on IoT for Disabled and Elderly People
Authors: Anantha Rushitha Lakshmi, M Praveen Reddy, Sangan Ruchitha, Y Sreenivasulu
DOI Link: https://doi.org/10.22214/ijraset.2022.44392
Certificate: View Certificate
Abstract
Pervasive devices are becoming an integral part of people\'s daily lives. Smart gadgets make people\'s lives easier and are becoming an essential part of the lives of physically tested and matured people. The need for safe and unrestricted mobility for the elderly and physically challenged is critical. The study deals with the creation of an Intelligent Wheel-Chair (IWC) that focuses on a certain issue in an exceptionally moderate and prominent manner.Wheel-Chair is controlled by RTOS as its center working framework. It comprises of touchscreen based route navigation alongside obstacle avoidance and fall identification. As a result with voice command movement of the wheel chair is dependent which will help disable and old aged people. The Node MCU used successfully detected the commanded and he Arduino micro-controller used in this project has successfully delivered its purpose.
Introduction
I. INTRODUCTION
According to the NSSO survey, locomotor disability is considered to be a prevalent disability. It is estimated that 1.6 per cent of the Indian population (around 16 million people) is inflicted with locomotor disability.
People want to be self-sufficient in this competitive world, whether they are old or disabled, because it makes them feel confident, and being self-sufficient has become their primary goal. Circumstances have eventually developed significantly in health care innovations and the development of exciting.
People with locomotor disabilities have difficulty moving from one place to another and require assistance. Many clever alternatives have been created for them to enable them to move freely and independently from one place to another. As a consequence, technology advancement is achieved in both software and hardware.
There is a wider range of walking sticks, basic wheelchairs, and power wheelchairs available on the market for disabled and elderly people. For walking sticks and basic wheelchairs, we need manual strength. The power wheelchair meets the needs of many disabled and elderly people, but some members of the community find it difficult to operate with a manual joystick and are unable to afford the power wheelchair. In some cases, locomotor disability affects hands too. In such cases, walking sticks, basic wheelchairs, and power wheelchairs with joysticks will not be so helpful.
The main purpose of this project is to provide and increase the mobility of people who suffer from locomotor disability in their hands as well as their legs, and elderly people who don't have strength in their hands. People want to be self-sufficient in this competitive world, whether they are old or disabled, because it makes them feel confident, and being self-sufficient has become their primary goal.
II. PROBLEM DEFINITION AND STATEMENT
Existing wheelchair solutions, which have GSM, GPS, and weather forecast, are built into the wheelchair. In total, the number of people that own a smart and feature phone is 7.26 billion, making up 91.54% of the world's population. When we have a phone that has features like GPS navigation, GSM, compass, radio, internet, Bluetooth, etc., then why do we need them separately on the wheelchair? Instead, connect the phone to the wheel chair, which has the same features as the inbuilt one. The goal of this project is to control the movement of a wheelchair via human voice, which enables locomotor disabled or elderly people to move independently and freely using voice recognition applications that are interfaced with the motors along with a sudden obstacle detection system.
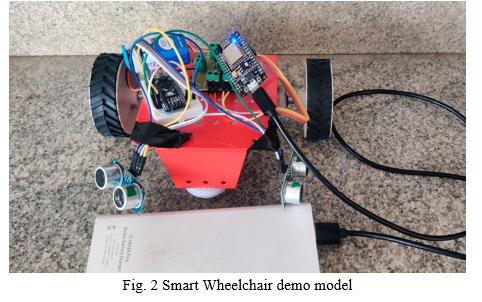
The wheel chair has been designed and developed in such a way that it can be implemented in a cost-effective and well-proposed manner, allowing us to commercialize our project for the benefit of the needy user.
III. PROPOSED MODEL
We are continually thinking of removing unnecessary things from the smart wheelchair, like GPS (Navigation Tool), GSM, etc., because we have them on the smart phone that is connected to the wheelchair. Phones are owned by 91.54 percent of the world's population. If we do this, the wheelchair will be cost effective. And we can provide commands via phone.
This device includes following components:
- Power Supply
- Arduino Nano
- Ultrasonic Sensor
- Node MCU
- L293d Driver
- Motor
- Buzzer
In this project, we use voice recognition technology to give voice commands for the movement of wheels in a wheelchair. Every smart phone can use Google's voice assistant. In this project, Google Voice Assistant recognizes the speech signal. This speech signal is used to convert the voice signal to a corresponding binary code, and that code is given to the micro-controller (Node MCU), and the micro-controller gives the output to the driver (L293d Driver) according to the voice input.
The Node MCU Developer Kit has Arduino like Analog (i.e. A0) and Digital (D0-D8) pins on its board. It supports serial communication protocols, i.e. UART, SPI, I2C, etc. After setting up the ESP8266 with Node MCU firmware, Node MCU with Arduino IDE Here is another way of developing Node MCU with a well-known IDE, i.e., the Arduino IDE. The Node MCU will send instructions to the L293D. The L293D is a common motor driver IC that allows a DC motor to drive in either direction
In this project, we will use four voice commands to control the direction of the motor.
a. Forward
b. Back
c. Stop
d. Rotate
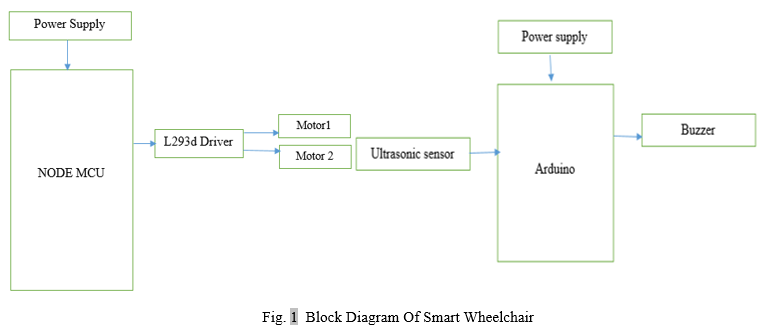
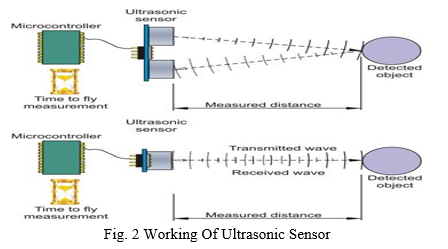
Obstacles and the falling of a wheelchair are detected by the ultrasonic sensor. The Ultrasonic sensor will send the ultrasonic waves and waves reflected back and indicate the danger with the help of a buzzer. It indicates danger when an obstacle is detected and the proper distance between the wheelchair and the floor is not maintained.
IV. FUTURE SCOPE
The system employs a fall detection and accident avoidance counteractive action module, and the reaction time is kept to a minimum. The database is refreshed every 5 seconds, and the module displays critical client signals on a regular basis. GSM can be triggered in cases of complication (i.e. when a fall is detected or when vital signs of the body become abnormal) to activate it and send messages to the concerned individual about the location and issue that has occurred. The obstacle avoidance module flips Wheel-Chair and prevents the client from colliding head-on. As a result, the suggested technology addresses the subject of sheltered and autonomous portability of physically challenged and elderly people in general. The cost of the developed Wheel-Chair is almost 60% less than the cost of Smart Wheel-Chairs.
Conclusion
As a result, the main goal of this project is to provide a safe and self-sufficient ride to the riders (locomotive-disordered and elderly people). With the command of speech or voice, which is detected by the Google assistant, the movement has occurred. And the ultrasonic sensor will detect the obstacles and fall of the wheel chair with the help of a buzzer.
References
[1] “A Novel Multipurpose Smart Wheelchair”, Deepesh K Rathore, Pulkit Srivastava, Sankalp Pandey, Sudhanshu Jaiswal, Department of Electronics and Communication, National Instituteof Technology, Bhopal , India ,2014 IEEE Students’ Conference on Electrical, Electronics and Computer Science [2] “An Approach of Human - Smart Electric Wheelchair Interaction in Intelligent Space”, Mihoko Niitsuma, Terumichi Ochi, and Masahiro Yamaguchi,[1] Hideki Hashimoto [2], Dept. of Precision Mechanics, Chuo University, Tokyo, Japan [1], Institute of Industrial Science, The University of Tokyo, Tokyo, Japan [2], 2011 IEEE Conference, Japan [3] ”Embedded system design for real-time interaction with Smart Wheelchair” P. Doshi Siddharth; Shripad Deshpande 2016 Symposium on Colossal Data Analysis and Networking (CDAN) Year: 2016 Pages: 1 - 4, DOI: 10.1109/CDAN.2016.7570917 IEEE Conference Publications Link: http://ieeexplore.ieee.org/document/757091
Copyright
Copyright © 2022 Anantha Rushitha Lakshmi, M Praveen Reddy, Sangan Ruchitha, Y Sreenivasulu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44392
Publish Date : 2022-06-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online