

Ijraset Journal For Research in Applied Science and Engineering Technology
Solar Agricultural Sprayer Robot
Authors: Vinaykumar K, Abhilash H, Gururaj A, M S Rajashekar, B Seema
DOI Link: https://doi.org/10.22214/ijraset.2022.45724
Certificate: View Certificate
Abstract
Manual spraying of pesticides and herbicides to crops and weed inhibitors onto the field are quite laborious work to humans. Manual trimming of selected unwanted plants or harvested crops from the field is also difficult. Our project proposes a multipurpose solar powered, flexible, Remote Controlled, semi-automated spraying robot with 4 Degrees of Freedom (DOF) in spatial movement, with additional plant moving equipment. The robot is designed to spray pesticide/insecticide directly onto individual lesions minimizing wastage or excess chemical spraying, hence making the system cost effective and also environment friendly. It is designed to cut down undesired plants selectively by remotely controlling the start and stop of the moving system. Alternatively, it also serves the purpose of maintaining lawns and sports field made of grass. The same system can be used for water spraying and mowing the grass to desired levels, leading to proper maintenance of the field. The robot is designed to move at 1.4m/s, with an effective spraying area of 0.98 sq. m. by the nozzle and an effective cutting area of 0.3 sq. m. by the mower, when stationary. The prototype has a battery back-up of 7.2hrs under minimum load conditions
Introduction
I. INTRODUCTION
India is agrarian economies and most of rural populations depend on agriculture to earn their livelihood. The farming methods at present are manual or semi-automatic with high involvement of labourers. In the recent years, the number of labour availability is reducing continuously along with increase in their wages. There is a requirement of higher productivity. Hence the device is to be designed which helps farmers to overcome the stated problem. Automated Robots can provide us the solution.
II. OBJECTIVES
- Create a robot that can be controlled remotely using a Bluetooth enabled controller.
- Create a user interface that allows the robot to travel in all of the required directions and conduct triggering actions such as pesticide spraying.
- To change the movement direction of the robot by detecting obstacles in forward and backward path..
- It should perform all operations on command.
- It should be safe and simple to control.
III. LITERATURE SURVEY
- Camargoa, J.S. Smith. (2009). An image-processing based algorithm to automatically identify plant disease visual symptoms. elsevier journal of computer and electronics in agriculture.
- Joaquin Gutierrez, Juan Francisco, Villa-Medina, Alejandra Nieto- Garibay, and Miguel Angel Porta-Gandara. (2014). Automated Irrigation System Using a Wireless Sensor Network and GPRS Module. IEEE Transactions On Instrumentation And Measurement, Vol.
- Mohamed Rawidean Mohd Kassim, Ibrahim Mat, Ahmad Nizar Harun. Wireless Sensor Network in Precision Agriculture Application. (2014). IEEE conference MIMOS, Malaysia.
IV. METHODOLOGY
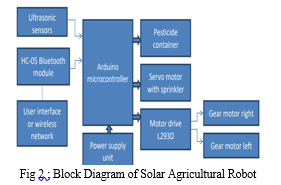
- The user can send commands to the system using android app, which are then relay to the controller over Bluetooth .
- For spraying pesticides, fertilizers and water, DC pump can be turned on and off .The robot is moved by a pair of wheels operated by L293D motor driver.
- Using ultra sonic sensor, obstacles can be detected in the forward and backward path of the robot movement which is used to change direction of the motor movement
The proposed robotic model provides a facility to control the movement of agriculture vehicle by the use of a SST micro controller. The micro controller is programmed using Embedded C software according to the navigation buttons provided in the android application which controls the agribot’s movement. The robot is placed in the farm and is switched on through IoT and its direction is controlled by Android application.
The spraying of pesticides, which can be done with the help of pesticide sprinkling pump, this can be periodically sprayed whenever the relay switch is on.
The system focuses on the design, development and the fabrication of the agricultural. robot with pesticide spraying system in addition to security system using IOT.
The agricultural robot is used to control the function like pesticide spraying and controlled through Bluetooth module which will communicate between android application and robot with low budget. The system is provided with dc motors for moving the robot and an intruder detection sensor, whenever the intruder is detected then a message is sent to the farmer, if the farmer’s smart phone is in silent mode then a voice announcement is played about the event occurred at the farm. The farmer can take the photo of the intruder using IOT technology and view the farm.
V. SYSTEM REQUIRMENTS
A. Hardware Requirements
- Arduino UNO
- Solar panel
- Servo motor
- DC pump
- Relay module
- Bluetooth Module
- DC motors and Wheels
- Motor driver
- Battery
B. Software Requirements
- Arduino IDE
- Embedded C
- Android Application
C. Software Used
- For Programming Microcontroller, we used Arduino 09 Software.
- USB Cable Standard A-B Cable is required.
- Language used is “Embedded C”.
- Arduino 09 is an advanced C/C++ development platform with peripheral configuration, code generation, code compilation and debug features for Arduino Microcontroller IC ATmega328.
- Android Application used is “Arduino Bluetooth Controller”.
D. Features
- Arduino Microcontroller

2. What is Arduino UNO: Arduino UNO is a low-cost, flexible, and easy-to-use programmable open-source microcontroller board that can be integrated into a variety of electronic projects. This board can be interfaced with other Arduino boards, Arduino shields, Raspberry Pi boards and can control relays, leds, servos, and motors as an output. Arduino UNO features AVR microcontroller Atmega328, 6 analogue input pins, and 14 digital I/O pins out of which 6 are used as PWM output. This board contains a USB interface i.e. USB cable is used to connect the board with the computer and Arduino IDE (Integrated Development Environment) software is used to program the board.The unit comes with 32KB flash memory that is used to store the number of instructions while the SRAM is 2KB and EEPROM is 1KB. The operating voltage of the unit is 5V which projects the microcontroller on the board and its associated circuitry operates at 5V while the input voltage ranges between 6V to 20V and the recommended input voltage ranges from 7V to 12V.
L293D DRIVER
A motor driver acts as an interface between the motors and the control circuits. Motor requires high amount of current whereas the controller circuit works on low current signals. So, the function of motor drivers is to take a low-current control signal and then turn it into a higher-current signal that can drive a motor
E. Hardware Used
- Solar Panel: Solar panels are those devices which are used to absorb the sun's rays and convert them into electricity or heat

2. Servo Motor: A servomotor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback

3. Dc Gear Motor: A gear motor is an all-in-one combination of a motor and gearbox. The addition of a gear head to a motor reduces the speed while increasing the torque output. The most important parameters in regards to gear motors are speed (rpm), torque (lb-in) and efficiency (%). In order to select the most suitable gear motor for your application you must first compute the load, speed and torque requirements for your application. ISL Products offers a variety of Spur Gear Motors, Planetary Gear Motors and Worm Gear Motors to meet all application requirements. Most of our DC motors can be complemented with one of our unique gearheads, providing you with a highly efficient gear motor solution
4. Dc Gear Motor Driver Circuit
a. L293D IC is used to control the DC Gear Motor.
b. 0 0 Forward
c. 0 1 Right
d. 1 0 Left
e. 1 1 Reverse
f. This IC Decides the movement of the motor.
5. Bluetooth Module
a. HC-05 is 6 Pin IC
b. Its range is 10M according to Transmitter and Receiver.
c. It uses serial communication to communicate with devices. It communicates with microcontroller using serial port (USART).
VI. FUTURE SCOPE
- It is very useful in agriculture Sector and reduce the workload.
- It reduces the time consumed in spraying the pesticide liquid and work very effectively.
- It will help the farmers to do work in any terrain, season and conditions.
- It will reduce the danger for the farmers from different breathing and physical problems.
VII. APPLICATION
- Agricultural fields
- Weed control
- Utility platforms
- Industrial applications
- Hazardous applications
- Hospital and safety applications..
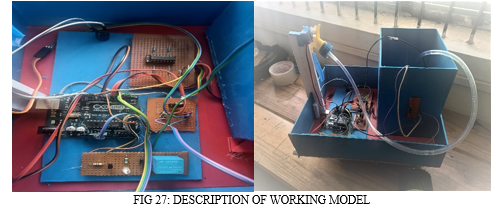
VIII. DESCRIPTION OF WORKING MODEL
The below images depict the working model of this project along with the components of the Agribot.
IX. RESULTS
The spraying time of insecticides is depending on the quantity of pesticide to be sprayed. For example, for a thousand ml of insecticides, spraying time is around five mins.If we want to grow the amount of pesticide to be sprayed, the burden lifting capability of the quadcopter must be elevated. This is achieved through deciding on the higher specification of BLDC i.e. Greater than one thousand rpm/kV. The flight time of the quadcopter is near approximately eight minutes. To boom the flight time we need to choose better specification for Lippo battery.
The height of spraying is 6-7 toes. The place protected is 10 x 10 toes. The biggest gain of the drone is that it's miles customizable according to the requirement. The drone may also be useful to spray now not best fertilizers and pesticides however also can be used to spray paints, display fields with the help of Wi-Fi digital camera too.
Conclusion
‘Internet of Things’ is far and wide castoff in relating devices and gathering statistics. This agriculture monitoring system serves as a reliable and efficient system and corrective action can be taken. Wireless monitoring of field reduces the human power and it also allow sestertii identify intruders causing trouble in the field. It is cheaper in cost and consumes less power. The smart agriculture system has been designed and synthesized. The developed system is more efficient and beneficial for farmers. It gives the information about the intruders in agricultural field through an alert message to the farmer, if the android phone is silent or is in vibrate mode, a voice alert message is sent announcing the nuisance caused in the field to the farmer. The system can be used in the current scenario of covid-19 to sprinkle sanitizing chemicals over the city without manual intervention. The application of such system in the field can definitely help to protect crops from intruders. In this project, IOT controlled robot, named, Agribot has been designed, built and demonstrated to carry out spraying pesticides in an agriculture field. The agribot will assist the farmers in increasing crop yielded and protect them from harmful chemicals of pesticides with security alert system.
References
[1] ASHISH LALWANI et al., “A REVIEW: AUTONOMOUS AGRIBOT FOR SMART FARMING”, Proceedings of 46th IRF International Conference, 27th December 2015, Pune, India, ISBN: 978-93- 85832-97-0 [2] 2) Burrell,J., Brooke T and Beckwih,R, \"Vineyard computing: sensor networks in agricultural production\", Pervasive Computing, IEEE(volume 3,issue 1) (3rd march 2004), pg. 38-45 [3] A. Linz, A. Ruckelshausen and E. Wunder(2014),\" autonomous service robots for orchards and vineyards: 3d simulation environment of multi sensor based navigation and applications\". [4] Oberg, Erik; Jones, Franklin D.; McCauley, Christopher J.; Heald, Ricardo M. (2004), “Machinery\'s Handbook” (27th ed.), Industrial Press, ISBN 978-0-8311-2700-8 [5] World Energy Outlook, Paris: IEA, 2015. Retrieved on 24/06/2017. [6] Pritam J.M., Yogesh G.A., Akash S.B. and Rajendra S.k., “Solar operated spray pump” International Research Journal of Engineering and Technology (IRJET), Vol. 03, No. 02, 2016. [7] S.Charvani, K.Sowmya, M.Malath, P.Rajani4, K.Saibaba “Design And Fabrication Of A Solar Sprayer” National Conference on Innovative Trends in Science and Engineering, page no 237to244 may 2017. [8] Tushar Maheshwaril, Upendra Kumar, Chaitanya Nagpae, Chandrakant Ojha and V. K . Mitta, “Capturing the spied image-Video data using a flexi-Controlled spy- robot”, 2015, Third International Conference on Image Processing. [9] Mr. V. Gowrishankar, Dr. K. Venkatachalam, “GRD Journals- Global Research and Development Journal for Engineering”, Volume 3, Issue 5, April 2018. [10] Prathibha S R, Anupama Hongal, Jyothi M P, “IOT Based Monitoring System in Smart Agriculture”, 2017, International Conference on Recent Advances in Electronics and Communication Technology. [11] Priyanka Yadav, Leena Chaudhari, Swati Gawhale, “War Field Spying Robot with Wireless Night Vision Camera”, International Journal for Research in Applied Science & Engineering Technology(IJRASET), 2017
Copyright
Copyright © 2022 Vinaykumar K, Abhilash H, Gururaj A, M S Rajashekar, B Seema. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET45724
Publish Date : 2022-07-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online