

Ijraset Journal For Research in Applied Science and Engineering Technology
Spy Robot
Authors: Tathagato Biswas, Supran Biswas, Vaibhavi Hanamshetti , Prof. Rageshri Bakare
DOI Link: https://doi.org/10.22214/ijraset.2022.44887
Certificate: View Certificate
Abstract
Nowadays, the technological and digital world is developing very fast. Everything is getting smart, so we are talking about the technological world the devices like home appliances and other things are getting control by mobile applications, and this only happens by the device Arduino Uno / raspberry pi3 and many others. Still, in our research we have used Arduino Uno to create a Wi-Fi controlled car with camera-top on it to monitor everything in its surrounding, we have seen many similar projects which using Arduino to makes things easy to use and its saving time and energy too. Automation is used for operating an electronic device such as the remote control car, home lighting system, and other useful things or reduced human invention. This report proposes a design and implementation of a remote. controlled camera car by Wi-Fi technology mobile devices. In this analysis work, radio code and hardware technologies area unit used, like the wireless module of ESP8266 for (transmitter and receiver), Arduino Uno as microcontroller, associate H-bridge L293D IC for motor controller and 2 electrical DC motors are used to move the car, & a Camera attached on the top of the vehicle.
Introduction
I. INTRODUCTION
In the Modern world. There are many people who are investing in Wi-Fi technology. Wi-Fi technology used in such as airport, home, office, and other public areas. Wi-Fi technologies supported by the computer, laptop, game consoles, and smartphones. Wi-Fi technology helps people to work and communicate without network cabling. This is very helpful for many users. Nowadays, Wi-Fi technology is not for internet use. Wi-Fi technology can control any kind of equipment like Aircondition, Television, Alarm, and many other appliances that support Wi-Fi technology. Hence it is possible to control the robot with Wi-Fi technology. This project is to design a robotic vehicle that can be utilized in defense. This robot is controlled by smartphone and hardware.
The remote camera is on a vehicle for checking the circumstance around the robot. This kind of robot is helpful in any spying reason field like military, and the police further it can be used for security of assets. Another benefit of this robot of this size can ignore people. It has endless applications and can be utilized as a part of various situations and environments. The use of this robot that can command is sent to a robot for controlling the operation of the robot to moves left, right, forward, or in reverse. The receiving command from application to the Wi-Fi module is connected with the Arduino to receiving control and motor with an Arduino via motor driver where they can help for movement of the vehicle. The power of the DC source is taken from batteries attached to a robot for Arduino, WI-Fi, camera, and motor driver.
II. LITERATURE SURVEY
Kyunghoon kim ; Soonil Bae ; Kwanghak Huh presented “Intelligent surveillance and security robot systems” published on 28 Oct. 2010 IEEE Workshop on Advanced Robotics and its Social Impacts which was held at Seoul, South Korea . This paper presents for this are also costly. Another point is that the signal strength may not be strong enough to reach every area, leaving portions of the location unmonitored. Also, bad weather can interfere with the signal of these systems. The purpose of the proposed system will be to eliminate the drawbacks of a new security solution that integrates vision, intelligent algorithm and robot technology. While conventional security solutions rely on human operator's vigilance on the images provided by cameras, the proposed solution uses machine intelligence to compensate for human factors and robots to provide immediate counter response. [1]
YungeunChoe ; Myung Jin Chung presented “System and Software architecture for autonomous Surveillance robots in urban environments” published in 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) which was held in Daejeon, South Korea. In this paper, they propose a system of the security robot and its software architecture. The proposed system and software architecture will make a robot to perform security missions. [2]
Ki Sang Hwang; KyuJin Park; Do Hyun Kim, presented “Development of a mobile Surveillance robot” Published in 17-20 October 2007 International Conference on Control, Automation and Systems which was held at Seoul, South Korea. In this paper, a simulation based design scheme has been adopted to a mobile order to compensate the motion of the vehicle which experiences the rough terrain. [3]
Jung-Hyun Park; Kwee Bo Sim presented “A design of mobile robot based on Network Camera and sound source localization for intelligent surveillance system”, Published on 02 December 2008 International Conference on Control, Automation and Systems which was held at Seoul, South Korea. This paper proposes the system which complement the vulnerability. Purpose of this paper is loading network camera and tracking module of sound source in mobile robot based on embedded Linux for tracking intruder. [4]
R.Karthikeyan ; S Karthik ; Prasanna Vishal TR ; S.Vignesh presented “Snitch:Design and development of a mobile robot for surveillance and reconnaissance” published on 13 August 2015 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS) which was held at Coimbatore, India. This paper describes a novel robot named Snitch capable of climbing walls, scaling horizontal and vertical surfaces while automatically controlling surface transitions, and provides the controlling user with surveillance of its location. [5]
T.M. Sobh ; R. Sanyal ; Bei Wang presented “Remote surveillance via web-controlled mobile robots” Published in Proceedings World Automation Congress, 20 June 2004 which was held at Seville , Spain. This work addresses visual remote surveillance through the World Wide Web. A mobile robot built at the RISC lab is controlled via the Internet with the help of images obtained from a network camera. The user specifies the desired position by utilizing the real time Web based visual interface. The autonomous robot moves to that location avoiding obstacles. [6]
Ashish U. Bokade ; V. R. Ratnaparkhe presented “Video control using smartphone and Raspberry pi” published on 24 November 2016 International Conference on Communication and Signal Processing (ICCSP) which was held at Melmaruvathur, India. This paper proposes a method for controlling a wireless robot for surveillance using an application built on Android platform. [7]
Jae-Seong Han ; Sang-Hoon Ji ; Kyung-Ha Kim ; Sang-Moo Lee ; Byung-Wook Choi presented “Collective robot behavior controller for a security system using open SW platform for a robotic services” published on 19 December 2011 in 11th International Conference on Control, Automation and Systems which was held at Gyeonggi-do, South Korea. In this paper they suggest a method how to organize collective robot behaviors for a self-localization algorithm that allows a recursive state estimation process to be collective in a multi-robot coalition team that is guaranteed connected.[8]
Ghanem Osman Elhaj Abdalla ; T. Veeramanikandasamy presented “Implementation of spy robot for a system using Internet protocol of Raspberry Pi” pubished on 15 January 2017 in 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT) which was held at Bangalore, India. In this paper they highlight, an essential requirement of a robot which automatically detects trespasser and report nearby board security control unit.[9]
III. DESIGNS AND FIGURES
A. Block Diagram
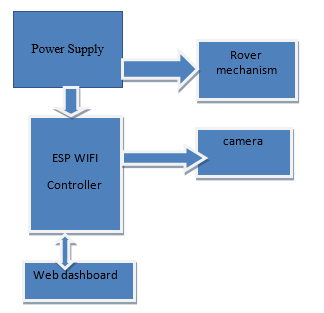
This project will make a remote control robot which has a view via an attached camera. In this project a remote control robot to be operate in a remote location. The robot can be driven remotely while viewing its perspective through a camera mounted on the robot. The robot also utilizes a robot that moves the camera around so that the user can see everything going on from where the robot is. We implemented this project where wifi network was obtainable across the entire campus. This will allow us to operate the robot anywhere that it could connect to the wifi. Realistically you can implement this project and control the robot from your computer anywhere that is within reachof that wifi signal. This WiFi Controlled robot is made using Esp8266 wifi module as a control unit We can power on the circuit using any battery as the power requirement is more than 5V. The Robot can be controlled using an blynk app.
C. Model Design

V. FUTURESCOPE
The paper is concluded that the robot has been designed and assembled with electronics, motors, camera .The robot moved on the ground. This robot system can be used in the attack and rescue operation to get the information from the human unreachable areas while doing military services. The study focuses mainly on supporting control methods for manual control. The CAD model developed shows maximum stress of 273MPa and is observed in the mass of the pendulum. This signifies that the appropriate control of up-righting the position of pendulum will balance the spherical spy robot for movement. Pure automated control without any manual operation, localization and navigation method of the robot can be implemented as a future study.
Conclusion
In this Research paper, we have a spy robocam that is used for the different field for surveillance. The paper contains information about the overall applications of the device to monitor and secure places that are difficult to reach, for instance, in the case of an investigation by intelligent agencies. It aims to provide accuracy and constant monitoring of the vacancy from any threat or break-ins via an embedded system and camera that sends information to the other end of the observer entity.
References
[1] N. MacMillan, R. Allen, D. Marinakis and S. Whitesides, \"Range-based Navigation System for a Mobile Robot,\" 2011 Canadian Conference on Computer and Robot Vision, St. Johns, NL, 2011, pp. 16-23. doi: 10.1109/CRV.2011.10 [2] A. Halme, T. Schonberg and Yan Wang, \"Motion control of a spherical mobile robot,\" Proceedings of 4th IEEE International Workshop on Advanced Motion Control - AMC \'96 - MIE, Mie, Japan, 1996, pp. 259-264 vol.1. [3] A. Bicchi, A. Balluchi, D. Prattichizzo and A. Gorelli, \"Introducing the \"SPHERICLE\": an experimental testbed for research and teaching in nonholonomy,\" Proceedings of International Conference on Robotics and Automation, Albuquerque, NM, USA, 1997, pp. 2620-2625 vol.3. [4] Q. Jia, H. Sun and D. Liu, \"Analysis of Actuation for a Spherical Robot,\" 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, 2008, pp. 266-271. doi: 10.1109/RAMECH.2008.4681363 [5] Knight, W. (2005), Spherical robot provides rolling security cover. New Scitentist.com news service [6] G. Zhan and W. Shi, \"LOBOT: Low-Cost, Self-Contained Localization of Small-Sized Ground Robotic Vehicles,\" in IEEE Transactions on Parallel and Distributed Systems, vol. 24, no. 4, pp. 744-753, April 2013. [7] D. Liu, H. Sun and Q. Jia, \"Stabilization and Path Following of a Spherical Robot,\" 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, 2008, pp. 676-682. doi: 10.1109/RAMECH.2008.4681358
Copyright
Copyright © 2022 Tathagato Biswas, Supran Biswas, Vaibhavi Hanamshetti , Prof. Rageshri Bakare. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44887
Publish Date : 2022-06-26
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online