

Ijraset Journal For Research in Applied Science and Engineering Technology
Survey on Battery Explosion Detection System
Authors: Raghav Bhutada, Shashwat Vora
DOI Link: https://doi.org/10.22214/ijraset.2023.50381
Certificate: View Certificate
Abstract
In recent years, the development of electric vehicle is gaining healthy growth. So, to maintain the steady growth of these, the state prediction and fault diagnostics of these vehicles need to be considered and managed effectively. To ensure safe and durable operation for battery systems voltage of the battery becomes the main characteristic for identification. Predicting the RUL (Remaining useful life) gives you an idea of the state of the battery. The capacity degradation curve of a lithium-ion battery can be understood using variations of RNN (Recurrent Neural Network). Using early-cycle, charge voltage, and temperature curves that show signs of battery failure, we apply a data-driven model to determine the state of health based on our observational, empirical, physical, and statistical understanding of multiscale systems. And predict and classify sample data. The ability to accurate state of charge (SOC) estimation is crucial to ensure the safety of the operation of battery-powered electric devices and to guide users taking behaviors that can extend battery life and re-usability.
Introduction
I. INTRODUCTION
The transition from fossil fuel to green energy is well known as the desired change in our society. To reduce the emission of Carbon dioxide (CO2) from conventional transportation, the development of Electric Vehicles (EV) is growing quickly. Battery technology will be one of the most important key enablers for the green energy transition. Lithium-ion batteries have been widely used in electric vehicles. It is projected that the global EV stock will expand to 140 million by 2030 [1]. Lithium-ion (Li-ion) battery is the most popular adopted power supply of EV due to its high energy density, long lifespan, lightweight, and low self-discharge rate [2]. Several factors could affect the performance and safety of Li-ion battery such as ambient temperature, over-charge, or over-discharge [3, 4]. A misuse of the battery can lead to a shorter battery life. To overcome these issues, Battery Management Systems (BMS) are applied to ensure the reliability and stability of the usage of Li-ion batteries. However, as the hardware and software implementation of the BMS becomes increasingly complex, battery faults can become complicated, and these safety measures prove to be inadequate [5]. So, we need to implement an efficient algorithm that will provide a smooth execution and take less computational speed for the BMS (Bat- tery Management System). One important parameter for the BMS battery health management is the battery State of Charge (SOC) estimation which helps to prevent the battery from over-charge and over-discharge [6, 8]. SOC indicates the amount of available charge in the battery which can be represented by a value in percentage. This value is intended to remain between 0% and 100%, although it is possible to violate these limits in an over-discharge or over-charge situation [7]. Relevant information such as the measured discharge current, voltage, and ambient temperature can be used to measure the SOC indirectly [9]. In general, the SOC estimation techniques stud- ied in the literature can be divided into three categories: direct methods, model-based methods, and data driven methods [10]. The direct methods look for the relationship between SOC and the physical battery characteristic parameters. Thus, our work proposes a data-driven approach for SOC estimation based on Deep Learning techniques. Different types of neural networks (NNs) such as Convolutional Neural Networks (CNNs) and Recurrent Neural Networks (RNNs) have been studied in the literature to solve various problems of different nature [11, 13]. RNNs are designed to handle sequential data, and they have been well studied in the domain of speech recognition and natural language processing with successful outcomes [15, 16]. However, RNNs struggle to handle long-term dependencies as long time series could cause exploding/vanishing gradient during the training phase. To tackle this problem, Hoch Reiter and Schmid Huber [12] proposed the use of RNNs with Long Short-Term Memory (LSTM) cells which can correlate a long- range of precedent information. The research result in [14], has shown that the CNN part helps to extract the spatial features from the input data (voltage, current, and temperature) while the LSTM layers explore the correlation of current SOC and historical input data.
II. LITERATURE REVIEW
Condition and failure prediction is of great interest in relation to battery systems due to the healthy development dynamics of electric vehicles. Voltage is one of the most important characteristic parameters for various faults in bat- teries.
Accurate prediction of voltage anomalies is therefore essential for the safe and long-term operation of battery systems. We investigate a novel deep learning-enabled method for performing accurate multi-forward step voltage prediction of battery systems using long short-term memory (LSTM) recurrent neural networks. Offline training of the LSTM model after all hyperparameters are pre-optimized, many-to-one (4- 1) model structure using improved pre-dropout technology and developed dual-model collaborative prediction strategy are applied. The results show that the proposed method has a strong predictive ability of battery voltage, and the accuracy and robustness of this method are validated through com- parisons between different hyperparameters. This is the first application of LSTM to battery system voltage prediction and failure prediction. Fault diagnosis is an important function in the battery management system (BMS) and is responsible for detecting faults early and providing control actions to minimize fault effects, to ensure the safe and reliable operation of the battery system. BMS is very important to identify various faults in EV’s. Few basic tasks of EV’s are Parameter Estimations, Data Storage, Diagnosis, Control. This project thus provides an efficient fault diagnostic algorithm, which include non-model-based methods (ANN, LSTM) which will take less computational power and will operate in real time to predict the output with greater accuracy.
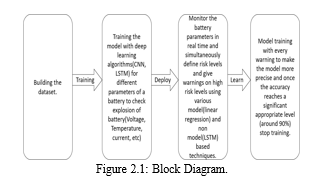
A. Proposed Algorithm
B. Dataset Description (UNIBO Power tools Dataset)
The UNIBO Power tools Dataset has been collected in a laboratory test by an Italian Equipment producer. The cycling experiments are designed to analyze different cells intended for use in various cleaning equipment such as vacuum and automated floor cleaners.The vast dataset is composed of 27 batteries, and it is summarized in Table 1. The main features of the dataset are: (1) the use of batteries from different manufacturers, (2) cells with several nominal capacities, (3) cycling is performed until the cell’s end of life and thus data regarding the cell at different life stages are produced, which is useful to assess how SOC is affected by the cell’s age and State of Health (SOH) as well as to validate the capability of the proposed model on estimating SOC under different health status. The dataset provides both raw (.xlsx) and processed (.mat) data. Raw data are saved in excel spreadsheets, that can be used to extract raw diagnostic and cycling data.
C. Algorithm implementation
We have used non-model-based algorithms like CNN, and LSTM to predict the output. We will predict the outcome in real-time. These methods primarily rely on collecting battery data, but still, make some use of battery modeling. They can improve the accuracy of fault diagnosis, but either require large amounts of often unavailable fault data or are very computationally expensive, making them impractical to use in BMS.
D. Long Short-term Memory Approach
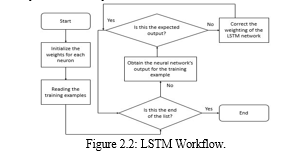
Firstly, at a basic level, the output of an LSTM at a particular point in time is dependent on three things: 1.The current long- term memory of the network — known as the cell state. 2.The output at the previous point in time — known as the previous hidden state. 3.The input data at the current time step. LSTMs use a series of ‘gates’ which control how the information in a sequence of data comes into, is stored in and leaves the network. There are three gates in a typical LSTM; forget gate, input gate and output gate. These gates can be thought of as filters and are each their own neural network. The first step in the process is the forget gate. Here we will decide which bits of the cell state (long term memory of the network) are useful given both the previous hidden state and new input data. The next step involves the new memory network and the input gate.
The goal of this step is to determine what new information should be added to the networks long-term memory (cell state), given the previous hidden state and new input data. Now that our updates to the long-term memory of the network are complete, we can move to the final step, the output gate, deciding the new hidden state. To decide this, we will use three things; the newly updated cell state, the previous hidden state and the new input data. Thus, this approach will be applied to the entire features present in the dataset and the output obtained will be constantly checked with the data obtained by the model when its trained in offline mode. If the desired output is not obtained then the reassignment of the weights to the neuron will take place and again the model will get trained. Thus, since the data is cross verified from the model trained in offline mode the real time data which is obtained can be treated time effectively and efficiently.
E. Data Normalization
Since the input features have different ranges, such as the temperature has much higher values than voltage and current, the trained model could give more importance to this feature over the others due to its larger value. To avoid this problem, the minimum maximum normalization method is used to scale all input features into the same common scale.
F. Real Time Monitoring
The main outcome of this work is to provide a real-time prediction of the output. To implement real-time output, we need to implement deep learning algorithms which store this output for a long time and predict the results efficiently. The main use of the LSTM algorithm is that we train the models offline and then predict the outcome in real-time so that the training process doesn’t interfere with the prediction process thus increasing computational efficiency
III. RESULT AND DISCUSSION
We have collected the required dataset to implement the deep learning algorithms and found out the basic parameters which will be needed for predicting the required output.
- The basic parameters needed in the dataset for predicting the output are: -
a. Pack Voltage.
b. Cell Voltage.
c. Temperature.
2. Datasets gathered till now are:-
a. UNIBO-powertools-dataset.
b. LGHG2 Original Dataset McMasterUniversity Jan 2020.
c. Custom-built battery prognostics tested at the NASA Ames Prognostics Centre of Excellence.
3. Dataset structure of NASA Ames Prognostics of Centre of Excellence-
a. Measured voltage at the battery terminal (Volts)
b. Current measured: Current drawn from the battery (Amps)
c. Battery temperature (Temperature measured) (degree C)
d. Charge current: Charger current measured (Amps)
e. Voltage charge: Charger voltage measured (Volts)
f. Time: The cycle’s time vector (secs)
4. Discharge-
a. Voltage measured: Voltage at the battery terminal (Volts)
b. Current measured: Current drawn from the battery (Amps)
c. Battery temperature (Temperature measured) (degree C)
d. Current charge: Current determined under load (Amps)
e. Voltage charge: Measured voltage under load (Volts)
f. Time: The cycle’s time vector (secs)
g. Capacity: Battery capacity (Ahr) for discharge down to 2.7V.
5. Impedance-
a. Sense Current: The current state of the sense branch (Amps)
b. Battery current: Battery branch current (Amps)
c. Current ratio: The ratio of the aforementioned currents
d. Battery impedance: Calculated from raw data, battery impedance (Ohms).
e. Rectified impedance: Battery impedance that has been calibrated and rounded (Ohms)
f. ReEstimated electrolyte resistance,paragraph six (Ohms)
g. Rct: Estimated charge transfer resistance is Rct (Ohms)
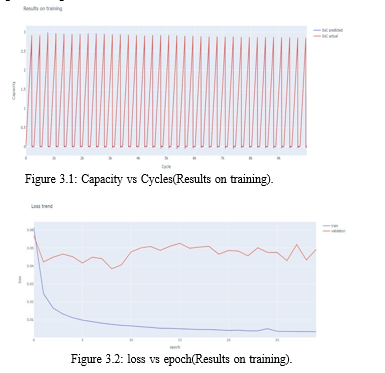
6. Results based on training and testing of dataset of UNIBO Power tools
IV. ACKNOWLEDGMENT
We would like to thank our Project Guide, Prof. Pranav Bhagwan Pawar, for his consistent and timely assistance, and significant contribution to the project’s success. The Head of Department,Dr.M.V.Munot provided invaluable assistance whenever needed. All laboratory faculty receive special recog- nition for providing laboratory equipment and equipment whenever needed. We would also like to thank my fellow members for their moral support and timely assistance in making the project a success.
Conclusion
The safety of lithium-ion battery systems has received sig- nificant attention from researchers. Battery failure, including internal and external failures, can affect the operation of the battery and lead to several potentially dangerous con- sequences, including fire and explosion . A key function of BMS is fault diagnostics, which provides early detection of faults and control measures to minimize their impact. Therefore, in recent years, methods for diagnosing failure in lithium-ion batteries have been widely developed. Machine learning approach for estimating, monitoring, and controlling battery management systems, including state-of-charge, health, and remaining useful life, are explored, focusing on their weaknesses and strengths used in this project thus provides a fast and efficient way which takes less computational speed as the models get trained offline and hence, they do not interfere with real time prediction, and this helps to boost performance of car system. In our work, for future implementation we will use various RNN’s combined mutually to overcome some shortcomings of LSTMs which is sensitive to various random weight initializations and GRU with low convergence rates will be improved by including more complex RNNs like the transformer in the ensemble as part of future scopes is used to obtain the results. Also, we plan to build a interface which shows all the required statistics of the car like the temperature, speed, battery conditions, battery heath etc. to the user.
References
[1] International Energy Agency. 2020. Global EV Outlook 2020. OECD Publishing, Paris. 276 pages. https://doi.org/10.1787/d394399e-en [2] Reiner Korthauer. 2018. Lithium-ion batteries: basics and applications. [3] Springer, Berlin [4] Shuai Ma, Modi Jiang, Peng Tao, Chengyi Song, Jianbo Wu, Jun Wang, Tao Deng, and Wen Shang. 2018. Temperature effect and thermal impact in lithium-ion batteries: A review. Progress in Natural Science: Materials International 28, 6 (2018), 653–666. https://doi.org/10.1016/j.pnsc.2018.11.002 [5] Dongxu Ouyang, Mingyi Chen, Jiahao Liu, Ruichao Wei, Jingwen Weng, and Jian Wang. 2018. Investigation of a commercial lithium- ion battery under overcharge/over-discharge failure conditions. RSC advances 8, 58 (2018), 33414– 33424. [6] A Review of Lithium-Ion Battery Fault Diagnostic Algorithms: Current Progress and Future Challenges by Manh-Kien TranORCID and Michael Fowler [7] SM.A. Hannan, M.S.H. Lipu, A. Hussain, and A. Mohamed. 2017. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommenda- tions. Renewable and Sustainable Energy Reviews 78 (2017), 834–854. https://doi.org/10.1016/j.rser.2017.05.001 [8] Gregory L Plett. 2015. Battery management systems, Volume II: [9] Equivalent-circuit methods. Artech House, United States [10] Yidan Xu, Minghui Hu, Anjian Zhou, Yunxiao Li, Shuxian Li, Chunyun Fu, and Changchao Gong. 2020. State of charge esti- mation for lithium-ion batteries based on adaptive dual Kalman filter. Applied Mathematical Modelling 77 (2020), 1255–1272. https://doi.org/10.1016/j.apm.2019.09.011 [11] AK. W. E. Cheng, B. P. Divakar, Hongjie Wu, Kai Ding, and Ho Fai Ho. 2011. BatteryManagement System (BMS) and SOC Development for Electrical Vehicles. IEEE Transactions on Vehicular Technology 60, 1 (2011), 76–88. https://doi.org/10.1109/ TVT.2010.2089647 [12] Juan Pablo Rivera-Barrera, Nicola´s Mun˜oz-Galeano, and Henry Omar SarmientoMaldonado. 2017. SoC estimation for lithium-ion batteries: [13] Review and future challenges. Electronics 6, 4 (2017), 102 [14] Asifullah Khan, Anabia Sohail, Umme Zahoora, and Aqsa Saeed Qureshi. 2020. A survey of the recent architectures of deep convolutional neural networks. Artificial Intelligence Review 53, 8 (2020), 5455–5516 [15] Sepp Hochreiter and Ju¨rgen Schmidhuber. 1997. Long Short- Term Memory. Neural Computation 9, 8 (1997), 1735–1780. https://doi.org/10.1162/neco.1997.9. 8.1735 [16] Wim De Mulder, Steven Bethard, and Marie-Francine Moens. 2015. A survey on the application of recurrent neural networks to statistical language modeling. Computer Speech and Language 30, 1 (2015), 61–98. https://doi.org/10.1016/j.csl. 2014.09.005 [17] Xiangbao Song, Fangfang Yang, Dong Wang, and Kwok-Leung Tsui. 2019. Combined CNN-LSTM Network for State-of-Charge Estima- tion of Lithium-Ion Batteries. IEEE Access 7 (2019), 88894–88902. https://doi.org/10.1109/ACCESS.2019. 2926517 [18] Alex Graves, Abdel-Rahman Mohamed, and Geoffrey Hinton. 2013. Speech recognition with deep recurrent neural networks. In 2013 IEEE International Conference on Acoustics, Speech and Signal Processing. IEEE, Piscataway, 6645– 6649. https://doi.org/10.1109/ICASSP.2013.6638947 [19] Wenpeng Yin, Katharina Kann, Mo Yu, and Hinrich Schu¨tze. 2017. Comparative study of CNN and RNN for natural language processing. arXiv preprint abs/1702.01923 (2017).
Copyright
Copyright © 2023 Raghav Bhutada, Shashwat Vora. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET50381
Publish Date : 2023-04-13
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online