

Ijraset Journal For Research in Applied Science and Engineering Technology
Theoretical Analysis and Design Optimization for Multi-GNSS Direct Radio Frequency Sampling Receiver
Authors: Ahmed Eltayeb Ahmed Elbushra, Prof. Dr. Alaa EL-ROUBY
DOI Link: https://doi.org/10.22214/ijraset.2022.48179
Certificate: View Certificate
Abstract
Recently, a considerable amount of research has been conducted on multiple GNSS receivers using the Direct RF sampling concept. This approach greatly reduces the hardware requirements of the traditional receiver by placing the analog-to-digital converter as close as possible to the antenna, eliminating the mixer stages. Furthermore, directly sampling the RF signal using the ADC allows for a more efficient design. In this paper, a Multi-GNSS Direct Radio Frequency Sampling Method is designed, optimized, and its performance is presented for several GNSS signals, including GPS L1, GPS L2, and GPS L5. The implemented method is used to find the ranges of valid sampling frequencies in single and multiple band RF signal cases. The algorithm presented results in an easier way to find valid sampling frequencies and a straightforward implementation without the need for complicated mathematical calculations. We consider aliasing issues and computational problems, providing a full theoretical and practical analysis compared to previously presented algorithms in the literature. This paper also examines the relationship between the sampling frequency, noise folding, and its effect on the signal-to-noise ratio (SNR), thus allowing for the selection of the optimal sampling frequency.
Introduction
I. INTRODUCTION
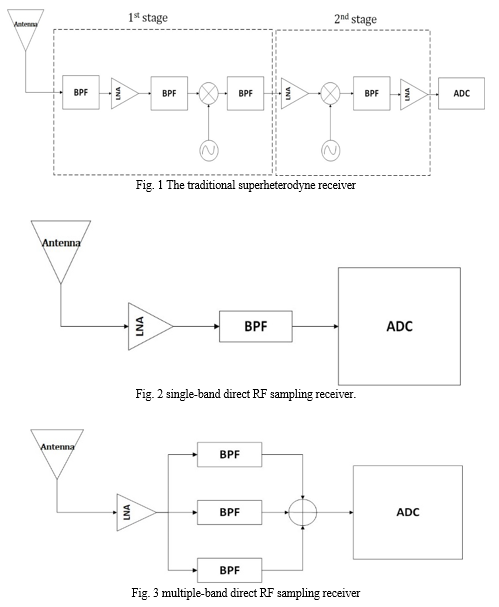
Over the last decades, the use of Global Navigation Satellite Systems (GNSS) is considered an important part of our life. Started by the initial launch of the Global Positioning System (GPS) by the United States of America (USA) in 1978, followed by the increasing popularity of this navigation system, several governments started to develop and launch their own Global Navigation Satellite Systems (GNSS). Russia’s system (GOLNASS), the European Union (Galileo), the Chinese (Bei Dou) , and two regional systems – Japanese (QZSS) and Indian (IRNSS or NavIC) are the main GNSS operating nowadays [1]. The navigation signals are transmitted by those systems with different specifications in terms of frequency, bandwidth, and modulation. As a result, designing a multi-GNSS receiver has become a major research topic and many studies have been conducted looking for a more robust, affordable, higher precision, and greater integrity multi-GNSS receiver design. GNSS receivers consist of two main sections: hardware (RF front end) and software (DSP). The Hardware section has different possible RF architectures. For example, the superheterodyne, Heterodyne and Homodyne architecture are shown in Fig. 1, are frequently used[2], hence, referred to as the traditional RF front end. Other architectures such as software defined radio (SDR) had also been used. Those RF hardware architectures are capable of handling single frequency band and in case of needing to handle multiple frequency bands (to enhance reliability or accuracy for example) they need to be duplicated for each band and that increases cost, power consumption, and complexity of the RF front-end.
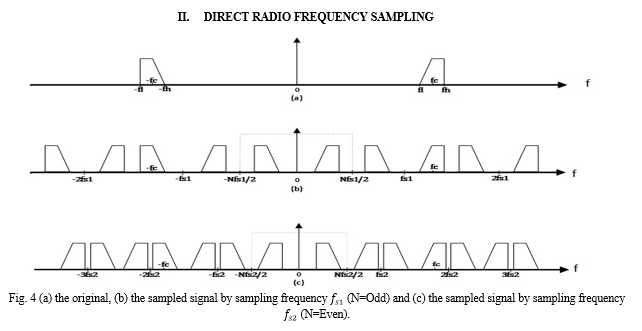
With the ongoing development in analog to digital converters, Direct RF sampling (DFRS) architecture became a candidate for Multi-GNSS RF receiver design. DRFS architecture provides the opportunity to overcome the limitations of its precedent for simultaneous Multi-GNSS processing. In the DRFS, the RF signal is sampled as early in the receiver RF Chain in case of single and multiple bands as shown in Fig. 2 and Fig. 3 .
The down-conversion of the high frequency GNSS signals occurs during the sampling process itself using signal aliasing in a regulated manner. Thus, removing the intermediate frequency (IF) stages of traditional receivers. DRFS simplifies the RF front-end as it does not need analog mixers which reduces the analog components, power consumption, cost, and size[3]. Furthermore, DRFS flexibility is regarded as very high because it samples the signal directly from radio frequencies (RF) as well as it handles multiple frequency bands with the same hardware simultaneously.
Nevertheless, DRFS receiver has its fair share of challenges, such as high power consumption due to the need of high amplification stages to reach full scale range of the ADC, high quality sampling process due to the high frequencies of the signals directly sampled[4]. Additionally, down-converting the RF signal will generate noise folding caused by aliasing, hence decreasing the SNR. These challenges are considered major research motive for the future improvement to increase the performance of DRFS receiver[5].
DRFS receiver has been discussed throughout literature by many authors such as [5]–[10]. In 1996 Akos and Tsui [6] designed a DRFS prototype that was able to receive the GPS L1 C/A (null-null BW of 2 MHz) with a sampling frequency of 5 MHz and an acquisition code to process the data. In [8] Thor and Akos described a DRFS prototype that captured both GPS L1 C/A signal and GPS L3 at 1381.05MHz then sampled both with a sampling frequency of approximately 74 MHz, an FPGA is used to process the data then transmit it to a PC for post-processing.
In [9] Psiaki proposed a DRFS prototype that receives the GPS C/A code and precision code (P(Y)) on the L1 and L2 frequencies then sampled with a sampling frequency of 55.5MHz ,the sampled data is transmitted to CPLD logic gates then saved and stored to computer to process it offline using MATLAB. In [5] Psiaki and Akos designed DRFS prototype to capture GPS L1 C/A has design to determine the effects of sample clock jitter with a sampling frequency 5.71429 MHz the sampled data is sent through a generic data acquisition system(DAQ), where it is stored on disk for offline processing. The most recent and advanced work on DRFS GNSS prototype is in [10] where Lamontagne proposed a flexible real time Direct RF sampling based GNSS receiver that can capture the GPS L1 C/A signal with a sampling frequency of 300 MHz, and it is used to validate the jitter effects and sampling jitter limits theoretical formulations so it does not affect the GNSS signal. Then the FPGA is used for data processing.
In this paper, we aim to present a complete theoretical framework for DRFS frontend receiver with focus on Multi-GNSS applications and use that framework for design optimization. That goal led us to consider two main issues: first, introducing an efficient and simplified frequency planning algorithm to determine all proper sampling frequencies for DRFS single and multiple RF signals. Second, studying the noise folding effects and theoretically analyzing their relation to the sampling frequency and their impact on the DRFS system performance, SNR.
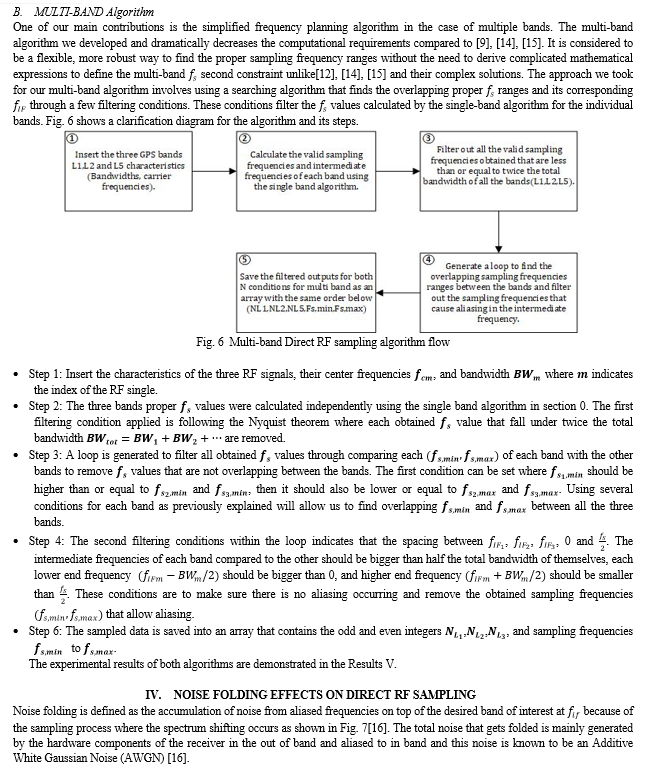
The paper is organized such that section II focuses on developing the mathematical constraints used to calculate the proper sampling frequencies in case of single and multiple RF signals, III presents the frequency planning and the MATLAB-coded single and multiple band algorithm to calculate proper sampling frequencies. IV studies the effects of noise folding on DRFS. The single and multi-band DRFS algorithms are implemented on MATLAB for L1, L2, and L5 and their results are presented in V. The design optimization is presented in VI. VII concludes the paper.

VI. DESGIN OPTIMIZATION
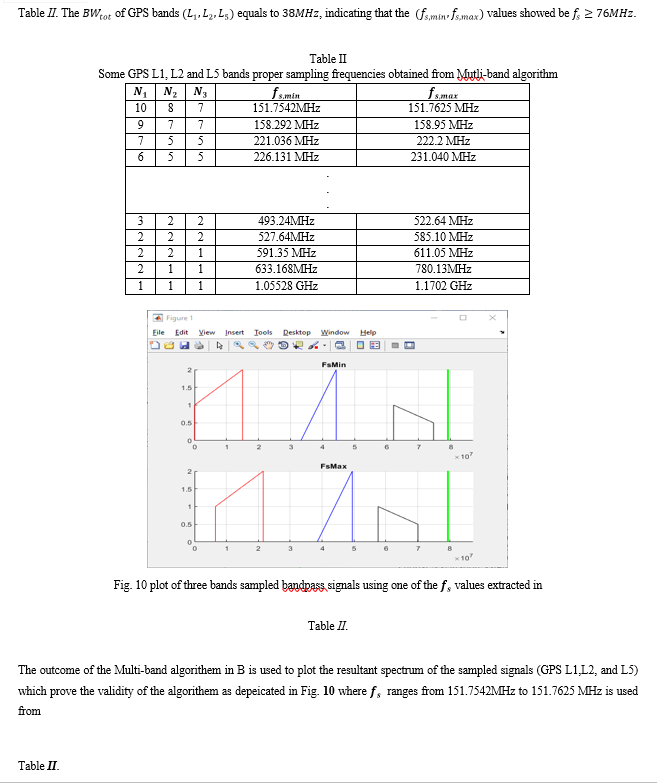
Following the framework of designing a DRFS receiver, an optimized sampling frequency selection process and its effect on signal to noise ratio (SNR) through minimizing the complexity and computational requirement of design was proven. A mathematical derivation conducted on direct RF sampling technique; we were able to calculate the optimal Fs values in the single band and multiple-bands case. Some values were tested on the DRFS architecture on Fig. 3. Starting by selecting the sampling frequency of 300MHz in both single band and multiple-band cases.
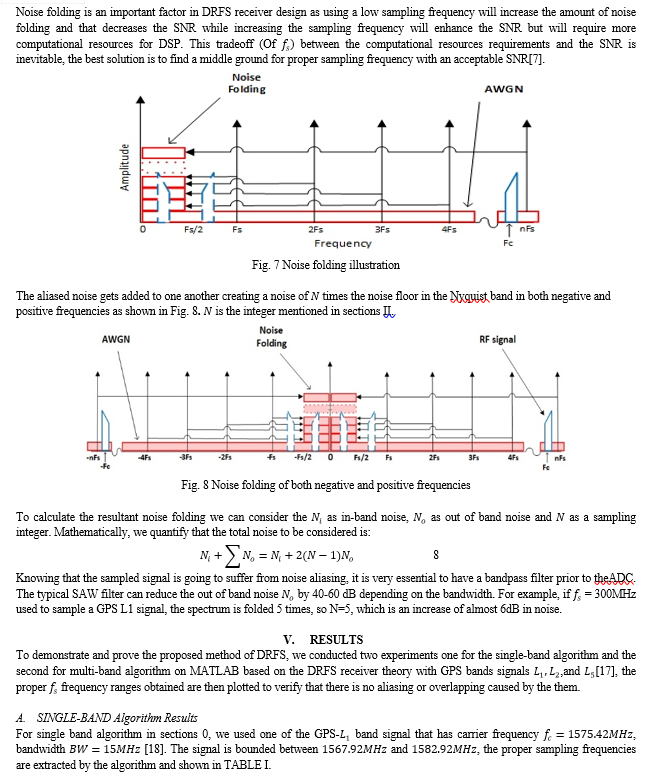
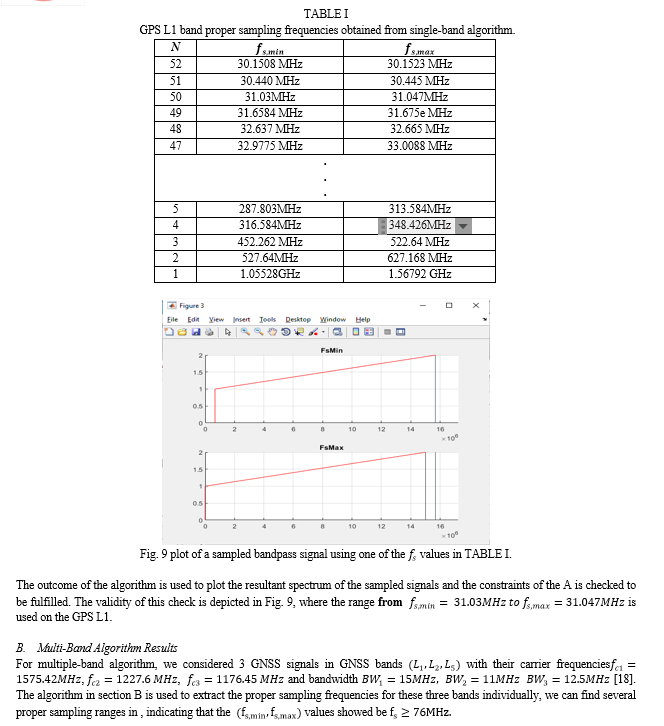
Finally, following the noise folding equation (8) we were able to minimize this effect by adding a bandpass filter prior to the ADC’s sampling process. Sampling the GPS L1 band single for example, using a 300MHz sampling frequency will fold the signal to N=5 folds as provided in A producing a noise of 6 dB which is considered a low noise effect.
VII. ACKNOWLEDGMENT
The authors wish to extend their sincere gratitude to EHSIM (Elektronik Harp Sistemleri Mühendislik Ticaret Anonim ?irketi) for supporting this project and research work.
Conclusion
A complete theoretical framework for a DRFS front-end receiver has been presented. A straightforward algorithm for frequency planning in case of receiving three bandpass signals simultaneously has been proposed. The frequency planning algorithm had been applied to the case of a multi-GNSS receiver that is considering L1, L2, and L5 bands and results is shown and confirmed. The proposed algorithm is implemented using MATLAB and dramatically decreases the computational complexity and simplifies the implementation compared to previous algorithms [7], [11], [12], [12], [19]. Furthermore, the amount of noise folding (N) is theoretically derived and mathematically expressed which is an essential step needed for the optimal selection of f_s and compromising between the needed computational resources (in the DSP stage after the RF front-end) and the receiver Signal-To-Noise Ratio (SNR). In conclusion following the framework presented in this paper for design optimization would be a new step into designing a fully operational DRFS front-end receiver.
References
[1] W. Lechner and S. Baumann, Global navigation satellite systems, vol. 25, no. 1–2. 2000. [2] J. Ó. Winkel, “Modeling and Simulating GNSS Signal Structures and Receivers,” Thesis, pp. 1–247, 2000. [3] M. R. Naik and C. H. Vithalani, “THE SOFTWARE-DEFINED RADIO IS NOW A REALITY,” 2013. Accessed: May 19, 2021. [Online]. Available: www.ijareeie.com. [4] V. Syrjälä, M. Valkama, and M. Renfors, “Design considerations for direct RF sampling receiver in GNSS environment,” 5th Work. Positioning, Navig. Commun. 2008, WPNC’08, vol. 2008, pp. 9–13, 2008, doi: 10.1109/WPNC.2008.4510351. [5] M. L. Psiaki, D. M. Akos, and J. Thor, “A comparison of direct radio frequency sampling and conventional GNSS receiver architectures,” Navig. J. Inst. Navig., vol. 52, no. 2, pp. 71–81, 2005, doi: 10.1002/j.2161-4296.2005.tb01733.x. [6] D. M. Akos and J. B. Y. Tsui, “Design and implementation of a direct digitization GPS receiver front end,” IEEE Trans. Microw. Theory Tech., vol. 44, no. 12 PART 2, pp. 2334–2339, 1996, doi: 10.1109/22.554550. [7] D. M. Akos, M. Stockmaster, J. B. Y. Tsui, and J. Caschera, “Direct bandpass sampling of multiple distinct RF signals,” IEEE Trans. Commun., vol. 47, no. 7, pp. 983–988, 1999, doi: 10.1109/26.774848. [8] J. Thor and D. M. Akos, “A direct RF sampling multifrequency GPS receiver,” in Record - IEEE PLANS, Position Location and Navigation Symposium, 2002, pp. 44–51, doi: 10.1109/plans.2002.998887. [9] M. L. Psiaki, S. P. Powell, H. Jung, and P. M. Kintner, “Design and practical implementation of multifrequency RF front ends using direct RF sampling,” IEEE Trans. Microw. Theory Tech., vol. 53, no. 10, pp. 3082–3089, 2005, doi: 10.1109/TMTT.2005.855127. [10] G. Lamontagne, R. J. Landry, and A. B. Kouki, “Direct RF Sampling GNSS Receiver Design and Jitter Analysis,” Positioning, vol. 03, no. 04, pp. 46–61, 2012, doi: 10.4236/pos.2012.34007. [11] R. G. Lyons, Understanding Digital Signal Processing, Second Edition. Prentice Hall PIR, 2004. [12] J. C. Liu, “Complex bandpass sampling and direct downconversion of multiband analytic signals,” Signal Processing, vol. 90, no. 2, pp. 504–512, 2010, doi: 10.1016/j.sigpro.2009.07.017. [13] A. Brown and B. Wolt, “Digital L-band receiver architecture with direct RF sampling,” Rec. - IEEE PLANS, Position Locat. Navig. Symp., pp. 209–216, 1994, doi: 10.1109/PLANS.1994.303406. [14] M. Choe and K. Kim, “Bandpass sampling algorithm with normal and inverse placements for multiple RF signals,” IEICE Trans. Commun., vol. E88-B, no. 2, pp. 754–757, 2005, doi: 10.1093/ietcom/E88-B.2.754. [15] C. H. Tseng and S. C. Chou, “Direct downconversion of multiband RF signals using bandpass sampling,” IEEE Trans. Wirel. Commun., vol. 5, no. 1, pp. 72–76, 2006, doi: 10.1109/TWC.2006.1576530. [16] V. Mookiah, “Quadrature BandPass Sampling Front-end for Global Navigation Satellite Systems,” no. July, 2015. [17] J. Subirana, J. Zornoza, and M. Hernández-Pajares, Gnss Data Processing, vol. II. 2013. [18] E. A. Sholarin and J. L. Awange, “Global navigation satellite system (GNSS),” Environ. Sci. Eng. (Subseries Environ. Sci., no. 9783319276496, pp. 177–212, 2015, doi: 10.1007/978-3-319-27651-9_9. [19] W. Li and Z. Liu, “A bandpass sampling design in multi-channel radio Receiver,” Procedia Environ. Sci., vol. 11, no. PART A, pp. 250–255, 2011, doi: 10.1016/j.proenv.2011.12.039.
Copyright
Copyright © 2022 Ahmed Eltayeb Ahmed Elbushra, Prof. Dr. Alaa EL-ROUBY. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET48179
Publish Date : 2022-12-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online