

Ijraset Journal For Research in Applied Science and Engineering Technology
Touch Controlled Wheelchair
Authors: Mr. Arpit Tiple, Mr. Akshay Pakade, Miss Shilpa Madavi, Mr. Anurag Khond, Mr. Tejas Potdukhe, Mr. Kunal Nandanwar, Miss Ashwini Thorat, Prof. Vipin Jais
DOI Link: https://doi.org/10.22214/ijraset.2022.41700
Certificate: View Certificate
Abstract
Smart robotic wheelchair has a great significance in life of a disabled person. With several merits, a wheelchair becomes a dilemma for a disabled person when comes to self-propulsion. This project describes an economical solution of robot control systems. The presented wheelchair control system can be used for different sophisticated robotic applications. The automatic robotic wheelchair comprises of the features like sensing hindrances and circuitry to avoid colliding to obstacle and emergency calling. Implementing embedded systems solution on self-propelled wheelchair enhances upgradability. This paper briefs a multifunctional wheelchair for disabled mob using, touch screen, ultrasonic sensor and Motor driver system interfaced through microcontroller which ultimately abolishes switching technology and thus optimizing hardware cost. Obstacle avoidance facility enables to drive safely in unknown as well as dynamic environments.
Introduction
I. INTRODUCTION
The main objective of this project is to design and develop a system that allows the user to interact with the smart wheelchair with touch screen at different levels of control for obstacle detection and collision avoidance providing efficient risk management. This project introduces a new design model of wheelchair for physically disabled which can be used for moving from one place to another. The project provides a helping tool to the disabled and helps them move around.
The wheelchair provides safety by adopting features such as obstacle detection for collision avoidance and hollow detection to avoid danger which they might encounter in their day to day life such wheelchair designed reduces dependency on caretakers and family members and promotes the feeling of self-reliance.
The smart wheelchair avoids or stops in front of obstacles. Speed is often decreased to avoid minimum obstacle clearance, speed is reduced to allow wheelchair to approach closer obstacles/objects.
Taking all in this in consideration we have decided to do a touch-screen operated wheelchair
- It is user friendly technology that operates on touch screen
- Less force is required for operation i.e. single finger is enough to operate a wheelchair.
As touch screen technology is acquiring highest peek in various scientific as well as commercially developing products, its use in patient friendly devices like wheelchairs may result in improved quality of service.
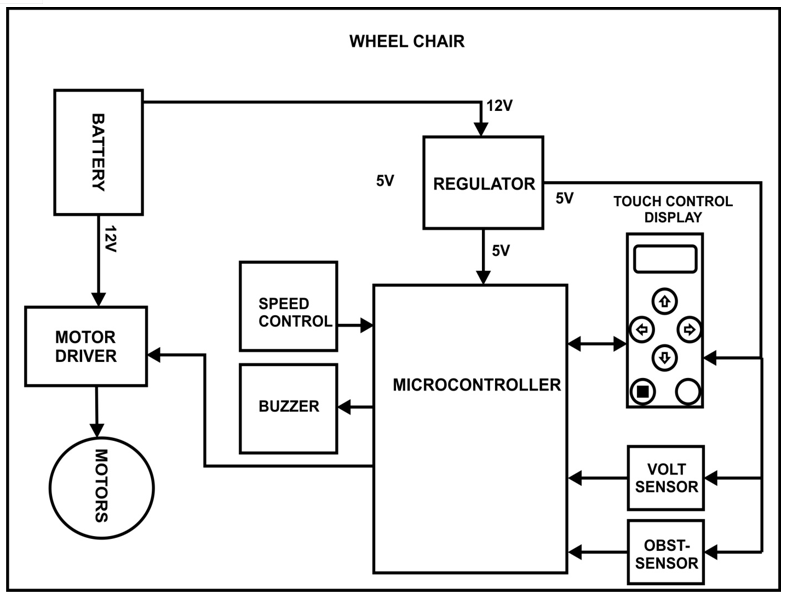
II. WHEELCHAIR SYSTEM
This system includes two modes of operation viz. manual and autonomous mode using PIC microcontroller. In manual mode touch screen is used which enables patient a user friendly interfacing of the wheelchair. An autonomous mode enables the patients to navigate indoors at predefined paths. It also contains obstacle detection techniques with the help of IR sensor. This allows the use of wheelchair for disabled person to lower the cost and improve effectiveness. The wheelchair users are also facilitated with wireless communication for emergency situation. The Intelligent wheelchair is developed as a very low cost product. It is designed as an embedded system and is directly usable; it does not require a laptop or other heavy devices as compared to the sophisticated wheelchair products available today. Hence it proves to be ideal solution for physically disabled and elderly people. In the situation where no of disabled and handicapped are aggravating with war and aging, this product has great timely value.
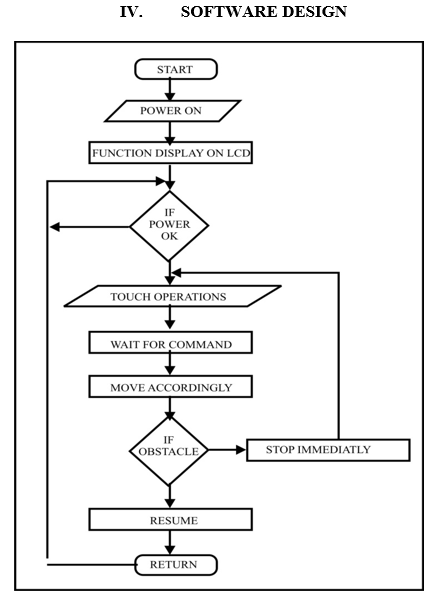
V. ALGORITHM
- Start
- Turn on power
- Give command on touch screen panel
- Choose navigation option as per indoor or outdoor environment
- Avoiding obstacles automatically through sensors
- Reach destination
- Stop
Software design enables the adaptive changes in the system without changing the hardware as per patient’s requirement. Some additional facilities can be added with the help of software. Patients with cognitive disorder require different arrangement than elderly patients.
A. Regulator IC 7805
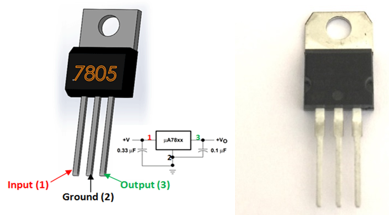
Voltage regulators are very common in electronic circuits. They provide a constant output voltage for a varied input voltage. In our case the 7805 IC is an iconic regulator IC that finds its application in most of the projects. The name 7805 signifies two meaning, “78” means that it is a positive voltage regulator and “05” means that it provides 5V as output. So our 7805 will provide a +5V output voltage.
The output current of this IC can go up to 1.5A. But, the IC suffers from heavy heat loss hence a Heat sink is recommended for projects that consume more current. For example if the input voltage is 12V and you are consuming 1A, then (12-5) * 1 = 7W. This 7 Watts will be dissipated as heat.
B. Driver IC ULN2003

ULN2003 IC is one of the most commonly used Motor driver IC. This IC comes in handy when we need to drive high current loads using digital logic circuits like Op-maps, Timers, Gates, DRIVERS, PIC, ARM etc. For example a RELAY that requires 12V and 300mA to run cannot be powered by an PIC I/O hence we use this IC to source enough current and voltage for the load. This IC is commonly used to drive Relay modules, Motors, high current LEDs and even Stepper Motors. So if you have anything that anything more than 5V 80mA to work, then this IC would be the right choice for you.
The ULN2003 is a 16-pin IC. It has seven Darlington Pairs inside, where each can drive loads up to 50V and 500mA. For these seven Darlington Pairs we have seven Input and Output Pins. Adding to that we can a ground and Common pin. The ground pin, as usual is grounded and the usage of Common pin is optional. It might be surprising to note that this IC does not have any Vcc (power) pin; this is because the power required for the transistors to work will be drawn from the input pin itself.
C. PIC16F886 – 8 Bit Microcontroller
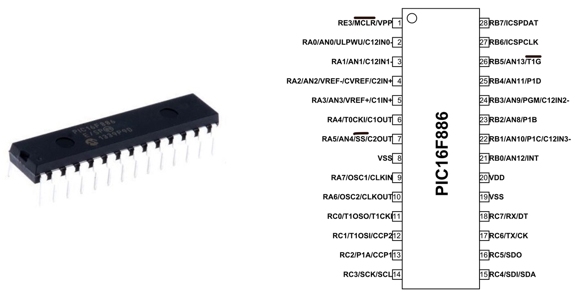
PIC16F886 is microcontroller from ‘PIC16F’ family and is made by MICROCHIP TECHNOLOGY. It is an 8-Bit CMOS Microcontroller with nano-Watt Technology. This microcontroller is popular among hobbyists and engineers due its features and cost. PIC16F886 is a microcontroller good for experimenting and developing applications because it has high flash memory rewrite cycle. Also there are a lot of tutorials and support available online. The controller has 16KBytes flash memory which is enough for many applications. Along with 24 programmable Input/output pins which are developed to handle 20mA current (direct LED driving capability) the system can interface many peripherals easily. With Watchdog timer to reset under error automatically the controller can be used to develop applications of permanent installation.
D. Relay
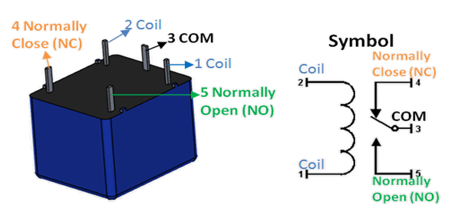
Relays are most commonly used switching device in electronics. There are two important parameters of relay, first is the Trigger Voltage, this is the voltage required to turn on the relay that is to change the contact from Common → NC to Common → NO. The other parameter is your Load Voltage & Current, this is the amount of voltage or current that the NC, NO or Common terminal of the relay could withstand, in our case for DC it is maximum of 30V and 10A. Make sure the load you are using falls into this range.
The above diagram is for relay triggering circuit. Since the relay has 12V trigger voltage we have used a +12V DC supply to one end of the coil and the other end to ground through a switch. For switching we are using a transistor as a switching device. You can also notice a diode connected across the coil of the relay, this diode is called the Fly back Diode. The purpose of the diode is to protect the switch from high voltage spike that can produced by the relay coil. As shown one end of the load can be connected to the Common pin and the other end is either connected to NO or NC. If connected to NO the load remains disconnected before trigger and if connected to NC the load remains connected before trigger.
E. HC-SR04 Ultrasonic Sensor

As shown above the HC-SR04 Ultrasonic (US) sensor is a 4 pin module, whose pin names are Vcc, Trigger, Echo and Ground respectively. This sensor is a very popular sensor used in many applications where measuring distance or sensing objects are required. The module has two eyes like projects in the front which forms the Ultrasonic transmitter and Receiver. The sensor works with the simple high school formula that Distance = Speed × Time
The Ultrasonic transmitter transmits an ultrasonic wave, this wave travels in air and when it gets objected by any material it gets reflected back toward the sensor this reflected wave is observed by the Ultrasonic receiver module as shown in the picture above.
HC-SR04 distance sensor is commonly used with both microcontroller and microprocessor platforms like Arduino, ARM, PIC, Raspberry Pie etc. The following guide is universally since it has to be followed irrespective of the type of computational device used. Power the Sensor using a regulated +5V through the Vcc ad Ground pins of the sensor. The current consumed by the sensor is less than 15mA and hence can be directly powered by the on board 5V pins (If available). The Trigger and the Echo pins are both I/O pins and hence they can be connected to I/O pins of the microcontroller. To start the measurement, the trigger pin has to be made high for 10uS and then turned off. This action will trigger an ultrasonic wave at frequency of 40Hz from the transmitter and the receiver will wait for the wave to return. Once the wave is returned after it getting reflected by any object the Echo pin goes high for a particular amount of time which will be equal to the time taken for the wave to return back to the sensor.
Conclusion
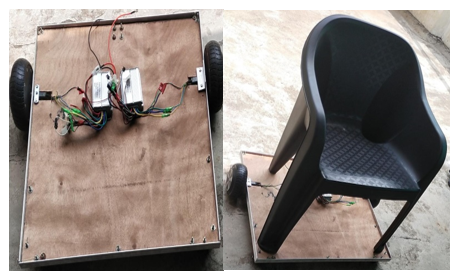
We have described the system which is driven by the sensors and advanced algorithm. Though we are mainly focusing on touch screen based system interface, further advancements can be done through more research. The interface and software can be modified and redeveloped according to the level of disability of the patient. The designed smart wheelchair enables the movement of wheelchair in any desired direction (forward, backward, right, and left) with the help of a touch screen. The touch screen is mounted on the arm rest. This touch screen is made portable fort better usage. The recumbent smart wheelchair can be transformed into the bed through separate keys that are provided in the touch screen. The back panel’s and the front panel’s angle can be adjusted depending on the user’s requirement. This greatly decreases the dependency on the family members and the caretakers. The wheelchair also provides efficient risk management by obstacle detection and obstacle avoidance. To provide further safety to the disabled the wheelchair has a LED to provide light when the surrounding environment is dark. During any emergencies that is when the disabled have to alert any of the care-takers around him he/she can easily do this with the help of a buzzer that is placed on the wheelchair.
References
[1] Jizhong Liu ; Hua Zhang ; Bingfei Fan; Guanghui Wang; Wu,J., “A Novel Economical Embedded Multi-mode Intelligent Control System for Powered Wheelchair”, Proc Int’l Conf. Computing, Control and Industrial Engineering (CCIE), June 2010, vol. 1, pp. 156-159. [2] Jizhong Liu ; Hua Zhang ; Bingfei Fan; Guanghui Wang; Wu,J., “A Novel Economical Embedded Multi-mode Intelligent Control System for Powered Wheelchair”, Proc Int’l Conf. Computing, Control and IndustrialEngineering (CCIE), June 2010, vol. 1, pp. 156-159. [3] Jizhong Liu ; Hua Zhang ; Bingfei Fan; Guanghui Wang; Wu,J., “A Novel Economical Embedded Multi-mode Intelligent Control System for Powered Wheelchair”, Proc Int’l Conf. Computing, Control and Industrial Engineering (CCIE), June 2010, vol. 1, pp. 156-159. [4] Luis Montesano, Javier Minguez, Marta D´?az and Sonu Bhaskar, “Towards an Intelligent Wheelchair System for Users With Cerebral Palsy” IEEE Trans on Neural Systems and Re-habilitation Engineering , April 2010, vol. 18 , Issue:2, pp.193-202. [5] Ming-Ching Tsai; Kai-Sheng Wu; Po-Wen Hsueh. “Synchronized Motion Control for Power-Wheelchairs” Proc Int’l Conf. Innovative Computing, Information and Control (ICICIC), Dec. 2009, pp. 908-913. [6] Romero, B.; Camacho, A.; Varona, J.; Delgado, C. ; Velazquez, R. “A low-cost electric power wheelchair with manual and vision-based control systems” Proc Int’l Conf. AFRICON,2009, Sept. 2009, pp. 1-6. [7] Posada-GOMEZ; L. Sanchez-Model , G. Alor Hernandez, A. Martinez-Sibaja, A. Aguilar-Laserre . L. Leija-Salas, “A Hand Gesture System Of Control For An Intelligent Wheelchair”, Proc Int’l Conf. ICEEE 2007, Sept 2007, pp. 68-71. [8] Saranghi P. Parikh; Valdir Grassi Jr.; R. Vijay Kumar Jun Okamoto Jr., “Integrating Human Inputs with Autonomous Behaviors on an Intelligent Wheelchair Platform”, IEEE Trans., April 2007, Volume 22, Issue 2, pages 33
Copyright
Copyright © 2022 Mr. Arpit Tiple, Mr. Akshay Pakade, Miss Shilpa Madavi, Mr. Anurag Khond, Mr. Tejas Potdukhe, Mr. Kunal Nandanwar, Miss Ashwini Thorat, Prof. Vipin Jais. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
![ijraset41697Arpit]](https://www.ijraset.com/downloads/paper_profile/ijraset41697Arpit].jpg)
Download Paper
Paper Id : IJRASET41700
Publish Date : 2022-04-21
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online