

Ijraset Journal For Research in Applied Science and Engineering Technology
Tracking of Under Water Objects using Particle Filter Algorithm
Authors: Bejjam Naga Lakshmi, Halavath Balaji
DOI Link: https://doi.org/10.22214/ijraset.2023.48929
Certificate: View Certificate
Abstract
It is difficult to track objects in under water, marine sciences and home security. To track the motion of objects which are in linear and gaussian system it will be quite difficult for trackers. The optics camera is subject to effect light and opaque, its visibility is very poor in under water. The other solution for optics camera is Forward sonar images, but the resulted tracked sonar images are with high noise and low contrast. In addition to provide effective result for tracked images we are using Particle filter algorithm. In this article we are modifying the traditional systems by tracking the motion of non-linear and non-gaussian system by using particle filter algorithm. To solve non-Gaussian problems an image processing is used to detect and track the underwater object automatically.
Introduction
I. INTRODUCTION
The particles are tracked using particle filter algorithm instead of using traditional algorithms such as Kalman filter algorithm [1] and extended Kalman filter algorithm [2]. Rather than these algorithmswe have optical camera [3] and sonar-images for detecting and tracking of objects in underwater, but these may not provide effective as expected because the above methods result in lower light and visibility of tracked objects. In this article we are using particle filter algorithm to detect and track, the motion of non- linear and non-Gaussian objects.
Affirmation is basic in a great deal of occupations in upkeep, fix of undersea structures, sea life sciences, and country security. Regardless, considering the way that optics cameras
[3] are dependent upon the impact of light and turbidity, its recognizable quality is poor in brought down condition. Along these lines, forward-check sonar is thoroughly applied to the brought downarticle disclosure beginning late.
In any case, there are up’til now a few issues, for example, Forward- see sonar imaging, which isn’t equal to optics imaging, structures reverberation data from acoustic sign in the water. Taking everything into account, sonar pictures are with high change and low qualification. It is hard for the supervisor to perceive brought down articles from the photographs. Like- wise, the view of brought down articles is dull and horrid, and it is certainly not difficult to submit botches considering the weariness and obstruction of the chief. To manage the above issues, a picture dealing with techniques to perceive and follow the brought down thing typically is introduced. Legitimately off the bat, the thing is picked utilizing open cv and some- time later brought down articles are confined. At-last the method dependent on Particle channel is obtained.
II. EXISTING SYSTEM
A, Optics Camera
Optics camera is dependent upon the impact of light and turbidity, its perceivability is extremely poor in submerged climate.
B. Forward Sonar Images
Forward- looking sonars [6] can give high resolution images that can be used for different tasks in an aquatic terrain. still, image interpretation is still an open problem due to multiple issues essential in aural imaging. Forward- looking sonars can give high resolution images that can be used for different tasks in an aquatic terrain.
C. Kalman Filter Algorithm
This cycle would be for calculating the area of an objective. Disintegration would likewise be useful in assessment cycle, is the video would be changed into outlines during the intro- duction period and each edge comprised of a bit of picture.
In an extra stage, the point in each edge is impersonated through different acknowledgment: the following position would be moving object and recognizing center directions and then the final step of the previous and current casings would be giving input and interpret the area of moving object available casing. The edge is estimated by channel.This is very important for many items. This is followed by the assistance of Kalman channel. It is used for the disintegration of edge pixel wise. Also used to estimate the mistake among real position of the ball and evaluated position of it with the help of this channel. Two assuptions:
- Gaussian Distribution and the Kalman Filter always function together.
- Linear methods will continue to be compatible with the Kalman Filter.
D. Extended Kalman Filter Algorithm
The standard Kalman Channel is portrayed as a prologue to the Lengthy Kalman Channel (EKF) which was utilized for the calculation execution. EKF shows the way that it very well may be feasible to screen the direction of moving articles with high accuracy utilizing sensor information, where the identification has been recently finished.
III. LITERATURE SURVEY
Some of the existing algorithms such as optics camera, forward sonar images, Kalman filter and extended Kalman filter algorithm which are used to track the motion of objects in under water with linear motion and also produces ineffective results for tracked image.
- Pranab, Badri, Vijay laxmi and Manoj introduced a paper titled with Multi Feature Fusion in Particle Fil- ter Frame work for Visual tracking. Theyintroduced a problem statement as Feature based tracking of targets accurately and robustly as it moves along the image plane. Here the objects are detected and tracked using KAZE features and particle filter algorithm, center loca- tion error, average and accuracy tracking with maximum success rate [10].
- Veerakumar and Kamalesh identified moving objects detection algorithm based on three frame difference and sparse optical flowwhich over comes problem of two frame difference for object tracking. They used optical flow, Lucas kanade algorithm and three frame difference [12].
- Girish and Samarth used Back subtraction, frame dif- ference and three frame difference, fish detection and fish tracking algorithms to track and detect fish in under water video. They used gaussian mixture model and three frame difference model for the purpose of tracking and detecting fish in under water video [11].
- Narayan, Anuja and Joshi were built a target model in under water video based on RGB histogram and then particle filter algorithm is applied to track the human in swimming pool environment. The Target in swimming pool is affected by bubbles, intensity, waves and so on.
- Sudarshan, Ravi and Sudha Rani trackedunder water objects using sonar images. Sequence of objects tracking in under water is not possible by using this sonar images. Due to adaptive variance noise of objects they are unable to track objects motion.They used autoregressive model to find state transition. The grey level template is used to define the regions of objects. The observation model and noise variance of object is determined by its adaptive value.
- Sachin, Pramod, and Swapnil In the end, estimation techniques might be extremely important in the surveil- lance system. Finding the target’s location is done in this way. In this system, tracking the video comes first, after which the video is divided into frames of the initialization length, with each frame consisting of a section of the original image.The targets in each frame are identified by colour reputation in a similar step, after which the moving target is placed in order to learn its centre coordinates. The coordinates of the previous and current frames are then entered in order to determine the location of the moving target’s gift body in the following closing steps.And this frame is envisioned with the aid of filter. The monitoring is very vital for exceptional object. The gadgets are tracked with the help of Kalman filter out.This filter out is used for the pixel smart subtraction of modern-day body. As well as also used to be find out the mistake between real role of the ball and envisioned function value with the assist of this filter out [8].
- The topic of the study is moving object tracking in dynamic situations, one of the most crucial topics in the field of computer vision. A significant amount of work has been done over the past ten years to develop intelligent, self- sustaining motors that offer extremely accurate and quick algorithms for item detection and monitoring. One of the most crucial difficulties in the field of computer vision is the tracking of moving objects in dynamic situations, which is what this study deals with. The creation of intelligent, self-sustaining motors that offer extremely accurate and quick algo- rithms for item detection and monitoring has been the focus of intense research over the past decade.
Our research explains and exemplifies how it may be possible to screen the trajectory of moving objects with high precision using sensor data, in which the detection has already been completed. The standard Kalman filter is a modification of the extended Kalman filter (EKF), which was used to construct a set of rules. Choosing model equations is therefore a challenge items. This set of rules is validated via experiments using realistic dataset [9].
8. M. Jia-Fa, X. Gang, S. Wei-Guo and X. Liu a 3D occlusion tracking Model of the underwater fish targets has been introduced. Multi-objective sparkling situating and following innovation is fundamental for conduct examination in fish following. To accomplish multi- target following, this paper proposes an impediment based technique for fish following in light of water quality testing stage. We efficiently infer a hypothetical model of genuine fish impediment following, nonexis- tent fish impediment following, and genuine and fan- ciful fish simultaneous impediment following in light of the accompanying strategies: the arrangement reflect imaging rule, and essential methods of picture handling like objective division. Utilizing this model, we expect to accomplish 3D fish following without impediment, satisfying the necessities ahead of time for fish target conduct examination. The trial results show the viability of the proposed 3D fish target impediment following Model [13].
9. D. Zuodong and D. Jiahao. To know the living propen- sities for Chinese Glove Crab naturally, we proposed another PC vision calculation to follow the direction of crab in this paper. Molecule Channel following calcula- tion is utilized to foresee the objective’s area and size from the caught video arrangements. We demonstrated it is appropriate to deal with non-Gaussian develop- ment, which meet the development qualities of crab development. In the element match phase of movement following, we propose utilizing multi- highlights which contains variety and shape elements to match the ob- jective for expanding the following strength and hearti- ness.By utilizing the weighting technique, the multi- highlights molecule channel (MFPF) joins the variety and shape highlights which could really tackle the fol- lowing disappointment issue because of comparative va- riety impedance, solid light aggravation and deformity of the objective. To decide the power and exactness of our calculation, we have utilized around 10 minutes video arrangements to test our calculation. The exploratory outcomes show that the MFPF is practical and can be utilized as a proficient device to get the pathway of crabs submerged somewhat with tackling the issue of the past techniques [14].
10. V. Ples?tina, V. Papic´and H. Turic´ Swimming Pool makes use of more than one Markov chains that use Segmentation in Pre- processing for Tracking Water Polo Players. Pool is dynamic climate and it is alterable due sprinkling, reflections and so forth, so following individuals in it is exceptionally hard.Swimmers in the pool likewise influences on foundation. In pre- handling, it means quite a bit to track down the most ideal way to isolate player prior to following. The fundamental exploration subject in this paper is to track down the best strategy for pool division. In this paper we present new technique for pool division. Introduced strategy from YCbCr variety space separate and break down Cb and Cr parts for foundation extraction. Strategy is contrasted and two techniques in writing and applied in water polo players global positioning framework [15].
11. J. D. Park and J. F. Doherty,A Steganographic Approach to Sonar Tracking. Steganographic transmission wave- forms are alluring for some applications, like submerged acoustic interchanges, observation, identification, and following. With regards to dynamic sonar following, a general methodology is introduced that covers a few subjects including foundation sound demonstrating, steganographic security evaluation of transmission wave- forms, target movement displaying, and clump track recognition. In shallow water, climate foundation sound overwhelmed by snapping shrimp, the introduced ap- proach shows attainability of steganographic sonar for target track identification.
12. A foundation sound displaying approach is introduced that uses emblematic time-series examination with stage space portrayal and grouping of time-series fragments. The time-developing qualities are caught with a secret Markov model. Steganographic security of the trans- mission waveform can be surveyed by estimating the Kullback-Leibler uniqueness between the cover model and the stegno-model.Ordinary following methodolo- gies neglect to perform dependably and existing track- before-recognize approaches additionally bomb because of overpowering hunt calculation when they utilize over- simplified short timescale movement models. A long timescale target movement model with contemplations for credibility is introduced and used in a clump track discovery approach.
13. A Monte-Carlo-based reproduction is performed to find the situations that exhibit the plausibility of stegano- graphic sonar in a shallow water climate with snapping shrimp sound [16]. Monte-Carlo method: Particle filters are used for hidden country estimation with nonlinear dynamical systems.
The inference of three-D human movement is a herbal utility, given the nonlinear dynam- ics of the frame and the nonlinear relation among states and photo observations. However, the utility of particle filters has been restricted to instances in which the wide variety of country variables is highly small, due to the fact the wide variety of samples wished with excessive dimensional troubles may be prohibitive. We describe a clear out that makes use of hybrid Monte Carlo (HMC) to attain samples in excessive dimensional spaces. It makes use of more than one Markov chains that use posterior gradients to hastily discover the country space, yielding honest samples from the posterior. We discover that the HMC clear out is numerous thousand instances quicker than a traditional particle clear out on a 28D humans monitoring problem[17].
IV. PROPOSED SYSTEM
In this project we are using particle filter algorithm to track and detect the motion of non-linear objects. This particle filter algorithm tracks and detects the motion of objects which has non-linear moment in under water. The objects detection and tracking in under water is quite difficult due to turbidity of water. To solve such kind of problems in under water we are using this particle filter algorithm which over- comes the failures with traditional algorithms. These particle filter algorithm tracks non- linear and non-guassian objects motion in under water. As this proposed algorithm produces effective results.
A. Advantages
- Easy to program.
- Flexible.
- Can handle non-linear and non- Gaussian systems.
- It works for any arbitrary distribution, not only for Gaussian objects.
B. Particle Filter
It is a non-linear and non-gaussian system. It is used to model normal continuous distributed functions. Now a days Multimodal processing is widely used. This algorithm is used in various fields such as: Economics, Military fields, Traffic Control, Visual Analytics. Based on Monte Carlo Methods, particle filters are able to solve non-Gaussian issues by converting the original data into particles (each of them representing a different state). Like Kalman Filters, particle filters likewise employ an iterative approach to get their estimates, and the more particles there are, the better our particle filter will be able to handle any potential form of distribution. Three sections comprise each iteration: Select numerous samples (particles) from the initial distribution. Sort the sampled particles by importance by weighing them all (the more particles fall in a given interval and the higher is their probability density). Re-sampling, which involves swapping out less likely particles for more likely ones (evolutionary al- gorithms only favour the fittest)Non-Gaussian system: Increas- ingly, for plenty utility areas, it’s miles turning into crucial to encompass factors of non- linearity and non- Gaussianity if you want to version as it should be the underlying dynamics of a bodily system. Moreover, it’s miles normally essential to manner statistics on line because it arrives, each from the factor of view of garage expenses in addition to for fast model to converting sign characteristics.
C. Video Tracking
Video trailing is that the method of locating a moving object (or multiple objects) over video tracking is to associate target objects in consecutive video frames. The association may be tough once objects are a unit moving quick relative to border rate.Algorithms:
- Target Representation and Localization: It is a bottom- up tracking process [4].
Bottom-up tracking process: We portray a tracker that can follow moving individuals in lengthy successions without manual in statement. Moving individuals are demonstrated with the suspicion that, while arrangement can fluctuate significantly from one edge to another, appearance doesn’t. This prompts a calculation that forms a model of the presence of the body of every person by bunching competitor, right off the bat, body sections, and afterward involves this model to track down all people in each casing. Bizarrely, the tracker doesn’t depend on a model of human elements to distinguish potential occasions of individuals; such models are temperamental, in light of the fact that human movement is quick and enormous speed increases are normal. We show our following calculation can be deciphered as a loopy deduction system on a hidden Bayes net. Investigates video of genuine scenes show the way that this tracker would be able:
a. count unmistakable people;
b. recognize and follow them;
c. recuperate when it loses track, for instance, assuming people are impeded or momentarily leave the view;
d. recognize the setup of the body generally accurately;
e. isn’t subject to specific models of human movement. Kernel based tracking:
Open-CV is a massive open-source library for computer vision, system learning, and image processing.Python is able to process the Open-CV array shape for analysis when it is integrated with a number of libraries, in- cluding Num Py. Kernel-based tracking [5] is another approach to target representation and restriction, which is the primary component in visual following of nonrigid articles. We use vector area and mathematical Kernel based tracking to identify the photograph sample and its numerous capabilities. By spatially veiling an isotropic piece, target portrayals based on element histograms are regularized.The covering generates spatially smooth likeness capabilities that are suitable for inclination- based development. As a result, the problem of objective limitation can be planned using the bowl of fascina- tion of the nearby maxima. As a likeness measure, we employ the mean shift system and a measurement obtained from the Bhattacharyya coefficient to perform the streamlining.In addition, the topic of mix with movement channels and information affiliation methods is brought up. We illustrate two of the potential uses: foundation data double-dealing, movement model-based Kalman following, and face following utilizing those capabilities
Contour tracking: Object Shadowing ways use styles like deep Sort cen- troid shamus,which track the detected object by com- paring the similarity of detected objects with other in each reused frame.If the object has same similarity metric throughout the frame also it will track the same object throughout sequence of frames and retain the same object ID for that object. This constant object ID for a particular object makes it easier for us to do the counting operations.
2. Filtering and Data Association: It is a top-down process. Top-down process: The non-stop remarks from this reasoning factor publications the tracker to reliably discover candidate areas with regular semantics through- out frames and localize the goal item example greater robustly and as it should be. Specifically, a standard item popularity version and a semantic activation map approach are deployed to offer powerful top-down rea- soning approximately item places for the tracker.
In addition, we broaden a vote casting primarily based totally scheme for the reasoning factor to deduce the item semantics. Therefore, even with-out enough school- ing data, the tracker can nevertheless achieve dependable top-down clues approximately the items. Together with the arrival clues, the tracker can localize items as it should be even in presence of diverse primary distracting factors. Extensive critiques on large-scale benchmark data sets, OTB2013 and OTB2015, definitely show that the top-down reasoning significantly complements the robustness of the tracker and affords trendy performance. Kalman filter: In this paper we defined a technique for shifting item detection and monitoring the use of Kalman filter. Basically, estimation system may be very crucial with inside the surveillance system. This system is for locating out the region of the goal. The decomposi- tion is likewise useful for the estimation system, on this system first step is the monitoring the video, after which the video is transformed into frames with inside the initialization duration and each body is made of a chunk of picture. In similarly step, the goals in every body are recognized through color recognition; subsequent function is the shifting goal and to discover the middle coordinates and subsequent every other final step the coordinate of the preceding and cutting-edge frames is inputted and discover the region of the shifting goal that’s gift body. And this body is envisioned through.
The monitoring may be very crucial for distinctive item. The items are tracked with the assist of Kalman filter. This is used for the pixel smart subtraction of cutting- edge body. As properly as extensively utilized to be discover the mistake among real function of the ball and envisioned function cost with the assist of this clear out.
Particle Filter: In goal monitoring, if the dynamic ver- sion satisfies the Kalman clear out assumptions, Kalman clear out is optimal, Particle filter is a second-best. Usually, structures are regularly not able to fulfill the best, right now particle clear out is normally higher than every other filtering method. In order to remedy the degradation and deprivation of particle clear out in Iteration. This article introduces crossover and mutation operations with inside the manner of sampling and re- sampling. As the Gabor wavelet isn’t touchy to the geometric distortion, brightness change, and noise with inside the manner of describing the objectives, and it can acquire a strong monitoring for the goal with Partial occlusion. So, this newsletter assemble Gabor wavelet characteristic template, proposed an advanced Particle Filter Algorithm, and put into effect strong monitoring to the goal in special contexts.
V. MODULES OF THE SYSTEM
A. An Underwater Video
In this article we use under-water video for tracking and detecting motion of objects in that collected video. We import an video which is the first step for tracking of object. The object in under water has low picture quality with ineffective results. Under water video which has object helps to easily track certain image in that video whether the quality of that video is ineffective.
Due to turbidity of water the tracking or detecting object in that under water video may produce ineffective results of tracked object.
B. Object Selection using open-CV
In this we can select an object of interest by using the open- CV module. In this we can draw a rectangular box around an object. An object in under water is selected by drawing rectangular box around that object with some highlighted color. That highlighted color helps to locate the object in under water so that this helps to easily locate object in under water.
C. Metric
We need a metric in order to compare histograms, here we are using the kullback leibler divergence metric.
D. Thing Tracking
Finding a thing in the dynamic edges of a video is called the following. The definition sounds straight forward yet in PC vision and AI, following is a sweeping term that encompasses attentively equivalent yet really different musings. Article that is picked must be followed in a non-straight system besides. In this we are using a development count known as atom channel to follow objects. This computation works in non-straight structure as well. This channel shows particles on picked articles and tracks it. It contains various methods like: initialize particles, weight particles, re-sampling of those particles.
VI. INPUT DESIGN
A. Input Video
We need a video which consists of objects in under water so that we can easily track as well as detect the motion of the object. Information can be given in 2ways:
- A pre-recorded video.
- Using Webcam. In this project we are using pre-recorded video (.mp4).
B. Prerecorded Video
In this video all the objects are in non-linear moment a preexisting video is collected to track or detect the motion of a particular object in that prerecorded video.This prerecorded video contains infinite number of objects from that the tracker need to select a particular object to track its motion.
C. Using Webcam
Live tracking of object in under water is done using web- cam, once after tracking of object we are going to detect the motion of that tracked object. So this tracking and detecting of particular object involves many steps. It involves comparison of frames and histograms.
D. Pre-Managing
The input video is changed into diminish scale video for evacuating unsettling influence in the video. It is a basic picture preparing undertaking as a foul data.
E. Object Selection
We can select an object of interest which we want to track. This can be done by using open-cv module in python. We provide several options to select an object such as: Press p: To select an object. Press R: To re-select an object. Press Q: To quit. Press I: To Toggle Information.
VII. OUTPUT DESIGN
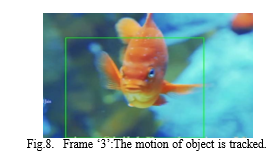
Video is given and selection of the object is done, then the object is being tracked by using a computer vision algorithm known as particle filter. This algorithm is also known as a condensation algorithm which can track objects in a non-linear and non-Gaussian system. The particles are displayed on the selected object and in this manner the objects are tracked. As the selected object moves then the particles are displayed on the object. The output video shows the movement of objects and particles are displayed on it.
A. Molecule Filter Algorithm
Molecule filter algorithm is also known as condensation filter, it is one of Bayes filter algorithm. It is used for both linear and non- linear tracking of objects. This algorithm is more suitable for tracking of under-water objects and it can provide efficient results for tracking of objects. This tracked objects are free from gaussian noise and gaussian-pdf. It works better with continuous normal distribution functions. It can handle multi-modal hypothesis over many possibilities. It can model non-linear motion of objects. We use probability functions for finding the weights of the current state by using motion transition states.
B. Nonexclusive Particle Filter Algorithm
- Step 1: Randomly produce a lot of particles Each individual identi- fied particle has its own position, heading and other additional information of the particle. By using this information, we can easily find probability or weight of particle. If this estimated particle weight matches with actual weight of particle so that we can initialize particle with same weight.
- Step 2: Predict next condition of the particles The particles are moved dependent on the direct of the authentic system. We anticipate the improvement of the genuine structures subject to these the particles are moved. Next particles moment is predicted in the present state by using its actual weight. The Current particles weight is compared with next particles weight so that we can easily find the position of predicted particle. In this project we are initially assigning the weight for every particle in the pre- recorded video at very first stage the weight of initial particle is zero. Therefore w1=0; Likewise w1=1; wn=n so on. Comparing frames also involves color histograms, which mainly helps to find or group similar colored particles into one group.
C. Update
The stacks of the particles are settled and later the loads of the particles are restored dependent upon the estimation of quantification. Particles that energetically organize check are weighted higher than particles which don’t encourage the estimations well overall. At every stage the weights of each particle gets update so that the compassion of frames in all different frames becomes easy for tracker.
D. Resample
Void altogether broken particles and abrogate them with duplicates of the more probable particles. To rescan images from video.
E. Workflow of Particle Filter
- A molecule channel is a recursive,Bayesian state esti- mator that utilizes discrete particles to rough the back conveyance of the assessed state.
- The molecule channel calculation registers the state gauge recursively and includes two stages:
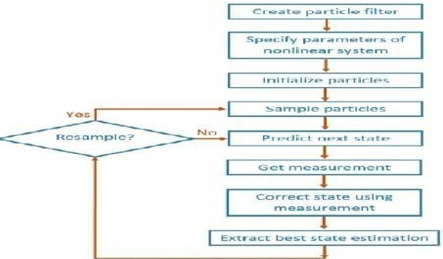
3. Forecast – The calculation utilizes the past state to antic- ipate the present state dependent on a given framework model.
4. Adjustment – The calculation utilizes the present sensor estimation to address the state gauge.
5. 5.The calculation likewise intermittently redistributes, or re sample, the particles in the state space to coordinate the back dissemination of the evaluated state.
6. The assessed state comprises all the state factors. Ev- ery molecule speaks to a discrete state theory. The arrangement of all particles is utilized to help decide the last state gauge. Procedure and estimation commotion can follow self-assertive non-Gaussian appropriations. To utilize the molecule channel appropriately, you should indicate parameters, for example, the quantity of particles, the underlying molecule area, and the state estimation technique. Additionally, in the event that you have a particular movement and sensor model, you determine these parameters in the state progress capacity and esti- mation probability work, individually. For more data, see Particle Filter Parameters. Follow this fundamental work process to make and utilize a molecule channel. This page subtleties the estimation work process and tells a case of the best way to run a molecule channel in a circle to persistently appraise state.
F. Estimation Workflow
When utilizing a molecule channel, there is a necessary arrangement of steps to make the molecule channel and gauge state. The expectation and revision steps are the principle cycle ventures for constantly evaluating state. Detected object is tracked using particle filter algorithm. After tracking the object in a given video the detected object is highlighted using a rectangular box around that object and the particles on the object are scattered. After tracking object several times the scattered particles are gathered closely in different frames, each individual frame has different scattered and gathered particles.
VIII. ALGORITHM
- Initialize particles
- Open video
- Get frames for dimensions
- Determination of ‘i’ term to follow
- Get an object for its dimensions
- A certain appearance model of the item
- Arbitrary test particles as per given state
- Instate loads similarly
- While (True):
- Get outlines from video
- Filter circle
- Arbitrary test particles as per given weight
- Move particles according to the motion model
- Compare appearance likelihood for each model
- Update particle weights
- Estimate object location based on weighted state of particle
- Draw box around the mean estimate
- Draw particles around the center of the box
- Display image
- Close video.
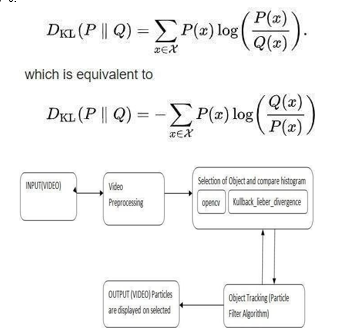
IX. SYSTEM ARCHITECTURE
It shows the stream among different portions all through the structure in a theoretical view. The programmer inputs a video for detecting objects in under- water. This video is then processed frame by frame then the motion of particles is observed with the change of their dynamic weights. When this video is in processing state after recognizing a particle by using open-CV library and compares histograms of a selected object and current frame. Detected object is tracked using particle filter algorithm. After tracking the object in a given video the detected object is highlighted using a rectangular box around That object and the particles on the object are scattered. After tracking object several times, the scattered particles are gathered closely in different frames, each individual frame has different scattered and gathered particles.
A. Kullback Liebler Divergence
It is mostly known as relative entropy. It is a non-symmetric contrast between two likelihood distributions. It is a degree of how one likelihood estimation isn’t proportionate to second. It can assess the separation between any two distributions. It is utilized as a separation measure. It is dependably non negative and zero precisely when P is relative to Q. When P is indistinguishable from Q the log of 1 is zero and therefore the parcel is zero. Otherwise, for every circumstance some non- negative quantity. So, it fills in as a division measure. But it is not totally a distance measure since it doesn’t follow the triangle law. Usually in managed learning we generally to display our information to unequivocal distribution. So, for this condition the vehicles might be dispersal. P and Q are discrete likelihood distributions, X is likelihood space
For all x, Q(x)=0 implies p(x)=0.
B. Video Pre-Processing
Processing a video means, acting operations at the video body via way of means of body. Frames are not anything however simply the precise example of the video in an unmarried factor of time.
We might also additionally have a couple of frames even in an unmarried second. Frames may be handled as much like an image. So, something operations we are able to carry out on pictures may finished on frames as well.
C. Open-CV
Open-CV is a massive open-source library for computer vision, system learning, and image processing. It now plays a leading role in real- time operation, which is crucial in today’s systems. It makes it possible to identify human handwriting, faces, and objects in photographs and videos. Python is able to process the Open-CV array shape for analysis when it is integrated with a number of libraries, including Num Py. Using vector area, we perform mathematical operations on the various capabilities of the photo sample to identify it. [18].
D. Particle Filter Algorithm
This particle filter algorithm is used to track and detect the motion of an object. Particle filters have attracted lots interest because of their strong monitoring overall performance in cluttered environments.Particle filters preserve more than one hypothesis concurrently and use a probabilistic movement version to are expecting the placement of the transferring item, and this constitutes a bottleneck to using particle filtering in real- time structures because of the pricey computations required.

- Histogram: Histogram is a graphical illustration of facts factors prepared into user-precise tiers.Similar in look to a bar graph, the histogram condenses a facts collection Test cases into an without problems interpreted visible through taking many facts factors and grouping them into logical tiers or bins.
- CV2 Functions:
- CV2.Imread Color: It specifies to transform the picture to the three channel BGR colour picture. Any Result: transparency of picture can be neglected. It is the default flag. Alternatively, we are able to pass integer price 1 for this flag.
- CV2.Imread Grayscale: It specifies to transform an picture to the single channel gray scale picture.Alternatively, we are able to by skip Result for failed video integer price zero for this flag.
- CV2.Imread Unchanged: It specifies to load an picture as such such as alpha channel. Alternatively, we are able to by skip integer price -1 for this flag.
XI. RESULT ANALYSIS
This research work utilized particle filter algorithm for tracking of under-water objects instead of using Kalman filter and extended Kalman filter were as these two algorithms are not producing as much as effective results. This particle filter algorithm produces 98.8 percentage of accuracy for tracking of objects. The PFA uses kullback leibler divergence to cal- culate the distance between two different frames. The color histograms are used for color comparison between different frames in the paused video. The likelihood of non-linear objects is noted in each frame. The initial weight of tracking object is maintained for the purpose of tracking its weight with final tracked objects weight. Initially the weight of frame is noted as zero and at every frame the weight is increased. Both weights are compared to test accuracy of targeted object.
XII. FUTURE SCOPE
In this project the motion of a particle is tracked. If the video contains multiple objects this Particle filter algorithm fails to track its motion. When this Particle filter algorithm is combined with Neural network algorithms and yolo we can track motion of multiple objects.
Conclusion
In this undertaking we have followed submerged articles. We have applied a molecule channel calculation against a sub- merged video. We have followed an item in a video. We have likewise utilized Kullback-liebler divergence as a separation metric that evaluates the distinction between two likelihood conveyance. In this way, we can say that molecule channels can take care of numerous issues of applied mechanical autonomy and it has become a standard apparatus for taking care of visual following issues in certifiable applications. We have tried these calculations against numerous recordings, it has followed numerous submerged items. Be that as it may, this undertaking tracks possibly a single article, it can’t follow objects when impediment happens.
References
[1] P. R. Gunjal, B. R. Gunjal, H. A. Shinde, S. M. Vanam and S. S. Aher, ”Moving Object Tracking Using Kalman Filter,” 2018 International Conference On Advances in Com- munication and Computing Technology (ICACCT), 2018, pp. 544-547, doi: 10.1109/ICACCT.2018.8529402. [2] T. Omeragic´ and J. Velagic´, ”Tracking of Moving Objects Based on Extended Kalman Filter,” 2020 International Symposium ELMAR, 2020, pp. 137-140, doi:10.1109/ELMAR49956.2020.9219 021. [3] Meitong Guo, Pinpin Zhang, Yimao Sun, Weihua Zhang, Yingjie Zhou, and Yanbing Yang, ”Object recognition in optical camera communication enabled by image restoration,” Opt. Express 30, 37026- 37037 (2022) [4] https://www.researchgate.net/publication/4023028 Finding and Tracking People from the Bottom Up [5] Comaniciu, V. Ramesh and P. Meer, ”Kernel-based object tracking,” in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 25, no. 5, pp. 564- 577, May 2003, doi: 10.1109/TPAMI.2003.1195991. [6] P. R. Gunjal, B. R. Gunjal, H. A. Shinde, S. M. Vanam and S. S. Aher, ”Moving Object Tracking Using Kalman Filter,” 2018 International Conference On Advances in Communication and Computing Technology (ICACCT), 2018, pp. 544-547, doi: 10.1109/ICACCT.2018.8529402. Computing Technology (ICACCT), 2018, pp. 544-547, doi: 10.1109/ICACCT.2018.8529402. [7] T. Omeragic´ and J. Velagic´, ”Tracking of Moving Ob- jects Based on Extended Kalman Filter,” 2020 International Symposium ELMAR, 2020, pp. 137-140, doi: 10.1109/EL- MAR49956.2020.9219021. [8] Bhat, Pranab Subudhi, Badri Thangaraj, Veerakumar PY - 2019/11/19 SP - 1,EP - 1,T1 - Multi-Feature Fusion in Particle Filter Framework for Visual Tracking VL – PPDO - 10.1109/JSEN.2019.2954331 [9] S. Gaude and S. Borkar, ”Fish Detection And Tracking For Turbid Underwater Video,” 2019 International Conference on Intelligent Computingand Control Systems (ICCS), 2019, pp. 326- 331,doi:10.1109/ICCS45141.2019.9065 425. [10] Yuan, Guo-Wu, et al. ”A moving objects detection algorithm based on three- frame difference and sparse optical flow.” Information Technology Journal 13.11 (2014): 1863. [11] M. Jia-Fa, X. Gang, S. Wei- Guo and X. Liu, ”A 3D occlusion tracking Model of the underwater. [12] P. R. Gunjal, B. R. Gunjal, H. A Shinde, S. M. Vanam and S. S. Aher, ”Moving Object Tracking Using Kalman Filter,” 2018 International Conference On Advances in Com- munication and fish targets,” 2015 IEEE International Conference on Electro/Information Technology (EIT), 2015, pp. 082-086, doi: 10.1109/EIT.2015.7293324 [13] Zuodong and D. Jiahao, ”Automatic Video Tracking of Chinese Mitten Crab Using Particle Filter Based on Multi Features,” 2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE), 2019, pp. 497-502, doi:10.1109/EITCE47263.2019.9095032. [14] V. Ples?tina, V. Papic´ and H. Turic´, ”Swimming Pool Seg- mentation in Pre-processing for Tracking Water Polo Players,” 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), 2020, pp. 1-4, doi: 10.1109/ICECCE49384.2020.9179 299 [15] .J. D. Park and J. F. Doherty, ”A Steganographic Approach to Sonar Tracking,” in IEEE Journal of Oceanic Engineering, vol. 44, no. 4, pp. 1213- 1227,Oct.2019,doi:10.1109/JOE.2018.2847160. [16] TY - JOUR,AU - Choo, Kiam,AU - Fleet, David,PY - 2001/12/26,SP - T1- PeopleTracking Using Hybrid Monte Carlo Filtering.
Copyright
Copyright © 2023 Bejjam Naga Lakshmi, Halavath Balaji. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET48929
Publish Date : 2023-01-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online