

Ijraset Journal For Research in Applied Science and Engineering Technology
Traffic Sign Recognition Using CNN
Authors: Dr. M. .Sreenivas, Raj Kamal Goud Vutukuri, Bipin Ganji, Manideep Goud Paruchuri
DOI Link: https://doi.org/10.22214/ijraset.2022.44532
Certificate: View Certificate
Abstract
You\'ve probably heard about self-driving automobiles, in which the passenger can completely rely on the vehicle for transportation. Cars must, however, understand and follow all traffic rules in order to achieve level 5 autonomy. Many researchers and large organisations, including as Tesla, Uber, Google, Mercedes-Benz, Toyota, Ford, Audi, and others, are working on autonomous vehicles and self-driving automobiles in the world of artificial intelligence and technological innovation. As a result, in order for this technology to be accurate, the vehicles must be able to understand traffic signs and make proper decisions. Speed limits, prohibited entry, traffic signals, turn left or right, children crossing, no passing of big trucks, and so on are all examples of traffic signs. Traffic sign classification is the process of determining which class a traffic sign belongs to. In this project, we\'ll create a deep neural network model that can categorise traffic signals in an image into several groups. Using our model, we can read and understand traffic signs, which is a critical function for all autonomous vehicles. Based on Convolutional Neural Networks, we offer a method for detecting traffic signs (CNN). We employ support vector machines to convert the original image to grey scale, then apply convolutional neural networks with fixed and learnable layers for detection and recognition. The fixed layer can limit the number of interest regions to be detected and crop the boundaries to be as near to the original as possible.
Introduction
I. INTRODUCTION
Traffic signs are markers placed along, beside, or above a track, thruway, walkway, or other route to guide, advise, and regulate traffic, which includes motor vehicles, cyclists, climbers, equestrians, and other travellers. As guest safety becomes more vital, Traffic Subscribe Recognition (TSR) has emerged as one of the most current research topics aimed at improving driving safety. While they are currently being developed to inform motorists about key traffic signs, these systems may in the future be able to take control of the car in certain conditions. During a drive, the input is largely conforming of visual data. The activity of driving is performed by the motorist based on such inputs isn't told by some mortal affiliated factors, similar as frazzle, wakefulness or so. Although current technology cannot reuse all visual inputs as a human person, the effort of motorists can be reduced by focusing on a specific component of this process. Also, several mortally related aspects, such as frazzle, wakefulness, and so on, have no bearing on the performance systemDriving safety has improved as a result. TSR systems were created with this goal in mind, reducing the likelihood of missing important traffic signs on the road. Upon first glimpse, the issue may show up to be straightforward. However, because the method on visual data is executed by a human brain, a computer performing the same procedure cannot be simple.Only a basic understanding of the characteristics of traffic signs is required. These characteristics closely resemble colour and shape information. Even though this knowledge is grossly inadequate to differentiate road signs from other objects, separation can be enhanced by integrating intelligence and knowledge. For example, when the lighting changes from time to time or from scene to scene, colour identification must be done accordingly. Furthermore, because some traffic signs may be missed due to certain circumstances, the shape information must be retrieved regardless of those circumstances.
II. LITERATURE SURVEY
Model suggested in research brings us one inch ahead to the excellent Developed Motorist Backing System, or totally robotic driving system, there's still a lot to be done. This paper uses the colour and geometry of a sign to determine its identity. If the sign's colour is affected by a reflection, this is a concern. Furthermore, ifthesign is chopped and cutoff, the shape ofthe sign is bloodied, result in no sign finding. Other crucial factor to consider isthe possibility of discovery in the middle of the night. However, if the camera isn't equipped to catch the terrain at night due to darkness, the sign will not be identified and classified. This operation can also include a textbook to speech module. The motorist would have to read the textbook printed on the classified sign in the current operation, but with the help of a speech module, the motorist would have even more comfort. With the addition of more datasets and statistics from different nations, the total performance might be improved and tailored.
III. EXISTING SYSTEM
There are various questions in the literature about the topic of Road Traffic Subscriber Recognition (TSR). In Japan, the very first work on automatic traffic sign detection was presented in 1984. In order to construct an effective Traffic-Sign-Recognition and discovery (TSDR) system and to eliminate all of the challenges listed above, different experimenters introduced several styles later on. The preprocessing, finding, shadowing, and recognition aspects of an effective TSDR system can be separated into many sections. The fundamental goal of preprocessing is to improve the visual appearance of photographs. Different methods are employed to reduce the impact of landscape on the test photographs, based on two key features: colour and shape. The goal of traffic sign discovery is to detect regions of interest (ROIs) in which a Traffic sign can be found after a large-scale hunt for campaigners (TS) within the input image. Various methods for identifying these ROIs have been presented. HIS/ HSV metamorphosis, Color Indexing, YCbCr colour space transfigure, and Region Growing are the most prominent colour grounded thresholding techniques. Color information can be fluently influenced owing to bad lighting or rainstorm fluctuations, thus shape grounded algorithms were included to help with the discovery phase. There are a variety of form finding approaches that are well-known for their effectiveness and processing speed.
IV. PROPOSED SYSTEM
In reality, it's impossible to solve without addressing Convolutional-Neural-Networks when it comes to recognising algorithms and techniques. Following their application in image bracketing, interest in Convolutional-Neural-Networks was reignited, and quickly, experimenters began utilising Convolutional-Neural-Networks for object discovery and recognition. Convolutional networks are universally effective when employed in a sliding window form, according to Sermanet et al., because many calculations can be reused in lapping zones. They demonstrated a network that can recognise and honour an item as well as its bounding box equals, allowing the honoured object to be shown with its class marker and a box drawn around it in the end. Another common CONVOLUTIONAL- NEURAL-NETWORK method is to calculate certain arbitrary object proffers first and then bracket just on these campaigns. R- CONVOLUTIONAL-NEURAL-NETWORK was the first to employ this method, however it is extremely slow due to two factors. Creating order-independent object proffers is time-consuming; for the Pascal VOC 2007 pictures, it takes roughly 3 seconds to induce 1000 proffers. Second, it calculates each seeker offer using a full deep convolutional network, which is obviously constrained and time intensive. The spatial aggregate-pooling network (SPP- Net) creates a convolutional point chart for the entire image and extracts feature vectors from the participating point chart for each offer in order to improve efficacy. The R CONVOLUTIONAL-NEURAL- NETWORK technique is now 100 times faster. The Fast R- CONVOLUTIONAL-NEURAL- NETWORK model, presented by Girshick and et., is a briskly interpretation of the RCONVOLUTIONAL-NEURAL-NETWORK approach.
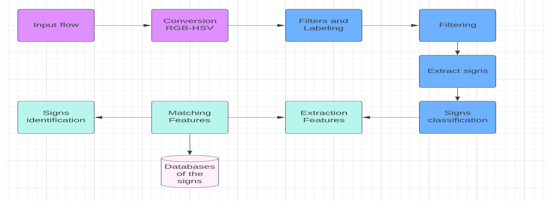
V. SYSTEM ARCHITECTURE
In this paper, this study describes a method for interpreting the primary signal with additional signals in order to improve the identification system's delicacy. The system is divided into many stages, as follows: Discovery of traffic seekers and areas of interest Images to be entered Addition of data Regions that recycle CONVOLUTIONAL- NEURAL-NETWORK is gaining knowledge Labeling of traffic signs. Different forms of traffic signs exist; for example, a prohibitory speed restriction sign plate often consists of changing figures. The limitation plate's main signal is combined with supplement speed indications, such as 40, 50, 60, 80, and 100. The entire Traffic-signs are used to communicate a meaning of Traffic signal in the traditional way.

VII. FUTURE ENHANCEMENT
Although the model provided in this study moves us nearer to the perfect Automated Driving System or possibly a fully autonomous vehicle, there still is a considerable distance to go. In this study, the colors and design of a symbol are used to determine its identification. If there is a reflection on the sign that alters the colour, this is a problem. Similarly, if the sign is chipped or hacked off, the shape of the sign is disrupted, rendering it invisible. Another key factor to consider is nighttime detection. The indicator cannot be recognised and categorised if the camera is unable to record the surroundings at night due to darkness. This application could incorporate a text-to-speech function. The driver would have to read the text displayed on the classified sign in the existing application, but with the help of a speech module, added comfort is ensured. More datasets from different nations could improve overall performance and personalization.
Conclusion
In this project, it is more harder to recognise traffic signs since they contain more categories and sorts of noises. The suggested CONVOLUTIONAL-NEURAL-NETWORK architecture consists of three convolution layers with a kernel size of 5,5 and three complete connected layers, as well as additional processed levels. The CONVOLUTIONAL-NEURAL-NETWORK works well with both original and region recommendation photographs since it has three basic sub-regions. To the training data, 5 to 10 degrees of rotation, shearing, and stretching were applied. We used the GTRSB\'s current benchmark traffic sign dataset to assess the suggested approach. According to an experimental evaluation on a benchmark dataset, our technique enhances accuracy when compared to almost state-of-the-art methods. The recognition system has a 95.57 percent accuracy rate when CONVOLUTIONAL-NEURAL-NETWORK is utilised.
References
[1] R. Biswas, H. Fleyeh, M. Mostakim, “Detection and Classification of Speed Limit Traffic Signs,” IEEE World Congress on Computer Applications and Information System, pp. 1-6, January 2014. [2] G. Antipov, SA Berrani, JL Dugelay, “Minimalistic CONVOLUTIONAL-NEURAL- NETWORK-based ensemble model for gender prediction from face images,” Elsevier, January 2016. [3] A. Shustanov, P. Yakimov, “CONVOLUTIONAL-NEURAL-NETWORK Design for Real-Time Traffic-Sign-Recognition,” 3rd International Conference “Information Technology and Nanotechnology,” ITNT-2017, 25-27 April 2017, Samara, Russia. [4] “Douglas Peucker Algorithm” https://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93 Peucker_algorithm [5] “Keras Tutorial - Traffic-Sign-Recognition” https://chsasank.github.io/keras-tutorial.html [6] https://scikit-learn.org [7] www.kaggle.com
Copyright
Copyright © 2022 Dr. M. .Sreenivas, Raj Kamal Goud Vutukuri, Bipin Ganji, Manideep Goud Paruchuri. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44532
Publish Date : 2022-06-19
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online