

Ijraset Journal For Research in Applied Science and Engineering Technology
Transmission Line Physical Inspection Robot Using Electrical Switch Gears and Embedded Logic
Authors: Kirti Dhenge, Kunal Urade, Saurabh Panchal, Sharwari Taiwade, Pankaj Kumar
DOI Link: https://doi.org/10.22214/ijraset.2023.49642
Certificate: View Certificate
Abstract
The real time methodology for inspection of Transmission line by using wireless robot is proposed in this project. As the technique is very much efficient for the inspection of transmission line. It is very risky to work with transmission line in normal as well as in Hazardous environment over the distance but by using the robot, inspection can done properly and to overcome it. The robot works on overhead transmission line which is composed of wheels and arms. An embedded computer based programming is chosen as for the control system. Wireless camera is installed to obtain the video and the communication is achieved.as we compare with the oldest technology to search problems in transmission line and how can it make easy with robot. This project detect the inspection of transmission line using switchgear and embedded logic with the help of robot
Introduction
I. INTRODUCTION
A physical inspection robot is a machine to perform inspection in hazardous environment in this case it includes electrical switchgear which are used to control and protect the robot can be controlled remotely either manually or automatically and can be programmed to follow a specific inspection . it operate safely as it increases the reliability or power grid and minimizes cost and time.
The procedure used for inspection and verification of wires or cables of energy transmission lines is subject to the experience of one technician who, through binoculars, covers the lines of transmission in a helicopter and is able of visualize points where seems to exist damages. After this previous identification technical teams are sent to verify, with greater detail, if the imperfection configures a situation of maintenance, the maintenance is carried out in a de-energized line.
This paper describes the project of a mobile robot able of carrying out visual inspection of transmission lines, reporting to the operator possible imperfections. This work is presented divided in mechanical system, mechanism for transposition of towers, base- robot operations communication architecture, development of the control system and development of the visual inspection system.
II. LITERATURE SURVEY
Before this technology people use to walk on cables. It is a high risk job, performed by people moving to the cables. This is very costly method ad also risk. Companies deploy teams call "line-man" who are each paid about rs 25000 monthly plus a dearness [1] allowance of rs 7,500 totalling, about rs 1 lakh expensive per month. using helicopters for fault detection and maintenance is also too costly & risky.
Thermal binoculars and special attire are used that can cost between Rs 22-25 lakh a piece. [2] 3. On hilly regions it is very difficult to go there for maintenance so Robot is easier to use on that line. It is also work on the night time because of using thermal infra-red cameras.[3]
We also get exact location of fault for repairing. Faults in the transmission line may prove extremely hazardous. This may lead to the total breakdown of the power system leading to instability. [4]
So the preventive maintenance of transmission line is of extreme importance. In order to serve this purpose a periodic and regular inspection of transmission line is very necessary. [5] 6. A real time methodology for inspection of transmission line by using wireless robot is proposed in this project. The inspection Robot with wheel driven can crawl along the overhead transmission wires. [6]
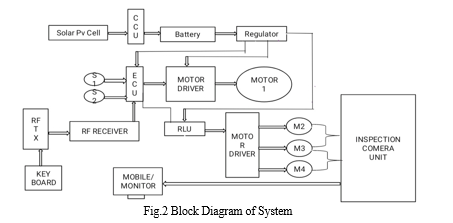
III. BLOCK DIAGRAM
IV. WORKING
Solar panel : it will converts solar energy to electrical energy Means solar panel generates DC.
CCU: charge control unit will provides a specific path to control/charge system and It also provides standard voltage levels to battery. Battery: it is storage device.
Regulator: regulator section consists 2 no. of integrated circuit's one is 7805 and second one is 7812 The IC carry's 7805 for 5v and other IC carry's 7812 is for 12v dc supply and Both will provides constant outputs. In this section Arduino plays main role ECU will take inputs from sensors and provides desired outputs to final control elements as per program. The L293D is a 16-pin Motor Driver IC which can control a set of two DC motors simultaneously in any direction.
V. COMPONENTS
- Relay
- Mtor Driver IC L293D
- Contactor
- Sensor
- Arduino
- Microcontroller
- Solar Panel
- Embedded C language
- Voltage Regulator IC 7805/7812
- DC Motor
- Battery
- Camera
- Monitor/ Mobile
VI. RESULT
- To increase the efficiency, accuracy and safety infection process.
- It reduces the human effort and risk of injury or accident.
- It collect accurate data and recognise exact point of damage.
Conclusion
The problem of risk to work with transmission line in normal as well as hazardous environment over hundreds of kilometres is overcome by this robot. The regular and periodic inspection of transmission line will now become possible using this robot. So the preventive maintenance of transmission line can be done as and when required and further hazards to the power system can be avoided.
References
[1] Campos, M. F. M.; Pereira, G. A. S.; Vale, S. R. C.; Bracarense, A.Q; Oliveira, M. P. and Pinheiro, G. A., 2002. "A mobile manipulator for installation and removal of aircraft warning spheres on aerial power transmission lines". In Proceedings of the IEEE Conference on Robotics and Automation, IEEE Conference on Robotics and Automation, Washington, DC, 2002, 3559-3564. [2] Davison, A. J., Kita, N. 2002. "Active Visual Localization For Multiple Inspection Robots". Advanced Robotics. Dixon, W. E.; Dawson, D. M.; Zergeroglu, E.; Behal, A., 2001. "Adaptive Tracking Control of a Wheeled Mobile [3] Robot Via An Uncalibrated Camera System & quot;. IEEE Gundimeda, D. P.; Veluvali, S.K. 1991. "An Automated Vision Based 27Approach For High-Voltage Insulator Testing". Electric Power Systems Research. [4] Jones, D.I.; Earp, G.K., 2001 "Camera sightline pointing requirements for aerial inspection of overhead power lines" [5] Electric Power Systems Research 57, pp. 73-82. Nakashima, M.; Yano, K.; Maruyama, Y.; Yakabe. H., 1995 "A hot line work robot system "Phasell" and its humanrobot interface "MOS" ". Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, vol.2, pp. 116-123.0 [6] Peungsungwal, S.; Pungsiri, B.; Chammongthai, K.; Okuda, M., 2001. "Autonomous robot for a power transmission line inspection" Proceedings of the IEEE International Symposium on Circuits and Systems, vol. 3, pp. 121- 124.
Copyright
Copyright © 2023 Kirti Dhenge, Kunal Urade, Saurabh Panchal, Sharwari Taiwade, Pankaj Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET49642
Publish Date : 2023-03-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online