

Ijraset Journal For Research in Applied Science and Engineering Technology
Unified Modular Snake Robot
Authors: Rinku Kalsi, Christina Bage, Tejas Nisar, Aditi Karkare, Rahul Kashid
DOI Link: https://doi.org/10.22214/ijraset.2022.42067
Certificate: View Certificate
Abstract
Every animal on earth has its own distinct feature and is capable of surviving on its own. Throughout history, humans have been inspired by the characteristics of animals to solve mankind\'s challenges. Reptiles possess various characteristics which can be used to solve societal issues when imparted in the form of a robot. Snakes possess versatile characteristics of surviving in the wild, thus portraying robust body and skin. The term unified suggests a group of modules put together as one. An ‘Unified modular’ snake robot allows different modules of the snake body to be held together, each having their individual characteristics. In this paper, we have mentioned about the physical structure and physical and mechanical aspects of the snake structure. Along with this the circuitry and the methodology of how it can be used for application is described.
Introduction
I. INTRODUCTION
Robotics is now being practically used in every field from agriculture to aeronautics, from education to medical, from production to entertainment, from domestic help to advanced research. Dedicated robots with specialized functions are being developed for every field. The world has already witnessed the successful use of robots in many spheres. Industrial robots, Domestic or household robots, Medical robots, Service robots, Military robots, Entertainment robots, Space robots, Hobby and competition robots. Humans have taken inspiration from various species in their surroundings and the list of examples is endless, some of them being birds as airplanes. Bio-inspired robots are becoming more and more mainstream because of their efficiency and idol skills. Problems such as rescue, security, information gathering and operations can be solved by using the skills of a snake as a robot. It can be built in many ways, some including wheels - 1 dimensional and some having the traditional circular structure- 2 dimensional.
The snakes have many degrees of freedom, they are hyper- redundant. Snake movements, especially the lateral undulating movements, allow the snake to cross a variety of surfaces, maintain balance throughout the body, and move efficiently. This allows the snake structure to enter compact spaces and reach its destination. This reptile thus possesses features that can help mankind at various undiscovered stages. The Unified modular snake is capable of various tasks such as urban search and rescue, reconnaissance and mine search. The tasks that this unified modular snake robot can accomplish can vary with advancements in tools, technology and research. The snake we have presented will have Lateral (horizontal) undulation, concertina movement, side winding and rectilinear motions with the head trained to identify objects.
II. LITERATURE SURVEY
- Design and Architecture of the Unified Modular Snake Robot-Cornell Wright, Austin Buchan, Ben Brown, Jason Geist, Michael Schwerin,David Rollinson, Matthew Tesch, and Howie Choset (2012) the authors described the architecture of the unified modular snake and elaborated on the mechanical aspects of the same. The paper focused on providing specific modular details.
- A Review Study on Future Applicability of Snake Robots in India (2015) - Nidhi Chaudhry, Shruti Sharma the authors explained and elaborated on their review paper the applications of Snake robot in India. They made a point to put forward every possible use structure plan for the Snake robot to be used.
- Aksel Andreas Transeth, K.Y. Pettersen (2006) the researchers reviewed the mathematical modeling and locomotion of snake robots. Due to some unique characteristics of snake robots like they can go through narrow paths, walk over rough surfaces they are being extensively used in rescue operations and firefighting where it is difficult for human beings to reach .The researchers discussed different approaches to biological inspired robots in their study.
- Konstantinos Karakasiliotis, Michail G. Lagoudakis, et.al. (2007) During their study, the researchers found that most robots used for rescue and search operations were inspired by biological sources of mobility, such as snakes, inchworms, etc. The researchers analyzed the feasibility of such robotic mechanisms. Researchers developed the ChlorochlamysChloroleucaria, multi-segment manipulator equipped with grippers at both ends and studied motion planning under physical and environmental constraints, which will be tested in the real-time scenario.
- JunyaoGao, XueshanGao, Wei Zhu, Jianguo Zhu (2008) conclude that snake-inspired robots can play crucial roles in disaster management activities. To cite an example of an earthquake, responding quickly while rescue operations is key to saving lives. Most of the time, due to large amounts of debris it takes time to locate people buried under debris.Snake Inspired robots can become useful tools to perform such rescue operations quickly. James K. Hopkins, Brent W. Spranklin, Satyandra K. Gupta (2009) the researchers introduced a new type of robotic design and showed how using existing technology and robotic design new forms of robotic designs can be structured. This paper also addresses various practical challenges in the field of snake-inspired robots.
- Maity, S. K. Mandal, S. Mazumder, and Sukamal Ghosh (2009) argue that wheel-based robots have several limitations, including the inability to climb, walking on rough surfaces, and difficulty walking over terrains. So engineers have worked in this direction and designed serpentine robots which can climb and crawl over rough surfaces. In this paper researchers explained the biological aspects of snakes and the research work done in this direction. They also explained locomotion and its type.
- Pal Liljeback, Oyvind Stavdahl, Kristin Y. Pettersen, et.al. (2010) conclude that there is need for intelligent snake robot locomotion in an unstructured environment and suggest two approaches for this. The first approach involves measuring the joint constraint forces at the link connections of the snake robot. Secondly, allowing the cylindrical surface of each link of a snake robot to rotate by a motor inside the link so that the robot can be propelled by its surroundings. The researchers describe the benefits of proposed design approaches over previous designs.
- Blessy Mariam Markose , Harshitha Loke (2014) the researchers analyzed the adaptability of snake robots in search & rescue operations and how these robots can reach places like narrow cracks, rough terrains and extreme environments where other search mechanisms or human beings cannot reach. But snake robots do have certain limitations like poor power efficiency and lesser control but the researchers conclude that innovation can overcome these limitations and snake robots can be a very successful mechanism.
- Pal Liljeback, Oyvind Stavdahl, Kristin Y. Pettersen, et. al (2014) the researchers describe a snake robot named Mamba that provides a platform that can help in snake robot locomotion research. A unique feature of the snake robot is that it can measure environment contact forces acting along its body, including underwater locomotion that can be achieved by separating the actuator inside each joint module with a custom-designed force/torque sensor. In this paper authors describe the design of the sensor and demonstrate its performance.
- Timothy Bretl, Teresa Miller, Stephen Rock Jean-Claude Latombe (2003) describe that there are various challenges in designing climbing robots with quasi-static motion. The researchers present a framework to compute climbing motions of three limb robots in real vertical natural terrain. The framework of climbing robots handles motion constraints, complicated robot geometries, unknown or partially known environments and three dimensional terrains is analyzed in detail.
During the last 10–15 years, the published literature on snake robots has increased significantly. Research in making modular structures of snakes more efficient is currently underway in various universities, but some of the early work on snake robots can be traced to NEVIS' CONRO robots at University of Southern California, Murata's self-configurable robots, Borenstein's OmniTread and Omni-Pede, and Carnegie Mellon's Millibot Train.
Mark Yim’s PolyBots are versatile modular robotic systems that feature one degree of freedom joints and several connecting ports per module. The interchangeable modules allow the robot to support a number of configurations including snake, spider, and rolling modes.Each module contains a Motorola PowerPC processor. The communications system uses the CAN standard with twoCAN buses per module. Each module can also share power and signal through the connecting plate. Sensors include an accelerometer, potentiometer, tactile whiskers, and hall effect sensors. Another related project is the CONRO study from University of Southern California. These versatile robots support leg-like or snake-like robot configurations. Three serially connected joints make up each module, allowing for limited motion. Each module can be docked with any other module on any of five sides. The modules include sensors, actuators, and microprocessors. They also have a built-in infrared communication link, which provides intermodule communication and helps guide the docking process. Many similar work is being conducted worldwide, including it’s version of underwater snake.
III. PROBLEM DEFINITION
Unnoticed humans trapped below a collapsed architectural structure or during a natural disaster is reported to be the second leading cause of death. This is caused by inadequate information passed to helpers, missed identification of humans or delays in receiving help.
It raises the question of what measures can be taken to reduce the number of deaths and loss of life. Detection of humans or valuable substances trapped in an area too narrow or dangerous for personnel to use results in this situation. If a person has access to air and water, the ability to regulate body temperature, was injured during the collapse, and had the mental strength to survive, he can survive under a collapsed structure until a rescue is implemented. There are places where reconnaissance becomes extremely difficult for humans to conduct due to the complexity and compact nature of the area and terrain.
With India's vast geographical diversity, they have been experiencing many natural and man-made catastrophes over the last few decades, such as massive earthquakes, fires, floods, airplane crashes, a Tsunami in 2011, Uttarakhand floods in 2013, and military operations in cases such as the 26/11 Mumbai attack (2008) and recent terrorist attacks in Punjab (India), which required assistance which could substitute for human intervention.
So the absence of a companion to act as our arms, hands, and legs in the face of such terrible circumstances needs to be filled. Camouflaging a camera to be placed on bare islands or dense forests in order to capture information about the research subject has many limitations too. These limitations include adaptability and motion homogeneity.
The problems stated above and the research on how these things can be tackled by a robot led us to coming together. We initiated a group discussion on the project ‘Unified Modular Snake Robot’.
IV. PROPOSED SOLUTION
It appears that the solution to the problems mentioned lies in an object that humans can operate. This object can therefore serve as a substitute for humans in conducting those operations. Among a wide variety of reptiles, snakes have some distinct characteristics, such as their lateral undulation pattern and the use of their heads for major operations. Snakes also showcase their ability to move across some harsh and uneven terrains due to their skin, movement pattern and body type. These features are some strong key features that can be inculcated in a snake type robot. The snake robot is thus composed of all the prominent characteristics of a snake and works as humans would model it. Hence making it even more efficient and adaptable. It is believed that snakes are among the most adaptable species. Similarly, the snake robot can be trained to act as efficiently as possible. When it comes to structural collapse rescue, victims are supposed to be rescued within 48 hours in order to have a positive chance of surviving. The depths in which humans get stuck are too difficult for humans to reach even after advanced techniques are used. Snakes have sleek bodies that can be used for identifying trapped humans if they are inside a collapsed structure.
Few of the fundamental requirements for a human to stay alive during such conditions include hydration, oxygen, mental stability and hope. The snake robots can carry water packets for the humans trapped in a very convenient manner. Snake robots may be used not just for urban rescues, but also for research and operation. When the cameras are camouflaged for capturing the details of wildlife in areas where humans cannot be present, there are high results of them getting broken up by the animals or by climatic changes. Snakes are the most common reptile found in forests and thus can be one of the great options to use for capturing information. The snake possesses the ability to climb trees, crawl on forest terrain and the advancements also allow then to travel underwater and one of the main features, namely homogeneity and familiarity with forest wildlife. The snake's robots can function as “legs” when moving; as “arms” when traversing branches; and as “fingers” when gripping objects. The proposed snake will be made up by building various models and unifying it as one snake. Each model is trained and prepared to enact and can also be modified as required. The head of the snake will consist of features like identification, capturing, detection and various other features can be added up by integrating the sensors and the tail will act as a push and balance maintainer. Thus, we move towards implementation further.
V. METHODOLOGY
A MG996R Servo motor has operating voltage around +5V and current range of 2.5A, speed of approximately 0.17 s/60°, weight 55 grams per motor, also it can rotate freely from 0° to 180 °. Due to following the specifications of the motor it becomes much easier for the body of a snake robot to navigate in complex environments. PLA filament was used for 3D printing because it is light in weight and highly efficient at forming the skeleton of the modular snake.nake. Frame ensures the security of the components and circuit and helps pass through rough terrains. Electrolytic capacitors are used in this model to filter and smooth alternating voltages and to manage uninterruptible power supplies. Other materials that were used are ball bearings, head & long screws, red & black gauge wires, header pins, heat shrink tube of various sizes, solder, glue and other miscellaneous tools.
The microcontroller of the unified robot, i.e, arduino nano is programmed to give directional and system commands, as well as to collect information from the surrounding environments. Microcontroller drives the servo motor driver through PWM signal pins. This helps the robot to be regulated according to the need for speed. The input pins control the degree in which motors turn.
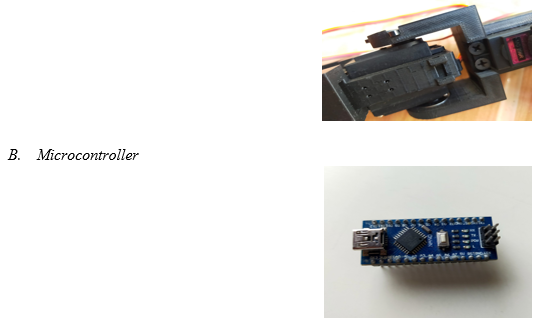
A. Servo Motor
The servo motor used in this robot is MG996r. It has 0-180°rotation, which allows the snake to have liberty of moment adaptability. The operating speed goes up to 0.17sec/60°, this speed was found comfortable for the purpose of display and performance demonstration. Although higher speed motors and motors with higher efficiency has to be used at the professional level.
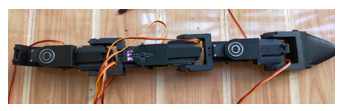
Arduino Nano is a microcontroller which works on AtMega328P. Due to its compact and sophisticated structure, we have used this microcontroller as our communicator. Arduino Nano used UART TTL- 5v serial communication, which ensures that the command is delivered to the snake robot accurately.
C. Skeleton
3D printers use material which is very light in nature and thus can be efficiently used in making the frame for the modular snake. The framing is an essential part of the model as it ensures the security of the components and circuit and helps pass through the rough terrains. Here we have used PLA filament for printing a frame.Polylactic Acid also called PLA is an appropriate material used for 3D printing the frame of a robot. It can be printed at a low temperature and does not require a heated bed, thus it becomes the filament of choice. To look after our environment during an execution of the project is our responsibility, thus PLA ensures that no environment is harmed during the making of this robot as it is biodegradable and thus environmentally friendly.
D. Electronic Power Supply
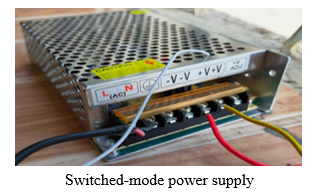
To meet the requirement of the microcontroller and the servo motors used, the needed power supply had to be in the range of 5 volts and 5 amperes. Thus to meet this requirement a switched-mode power supply is used.
VI. OVERVIEW
The unified structure of the robot has a large bandwidth of benefits. The modular structure of the robot gives it a very high liberty with respect to degree of freedom. These edges then allow it to adapt to the surroundings. The modular snake robot is capable of changing its directional flow very smoothly due to the design of its body. The body also makes this robot less error prone, as the modules are individually dependent. They tend to carry on the motion even if one module falls flat.
The modular snake robot which has been worked upon, shows a restriction in its speed of action. Due to the heavy power source required for the efficient action of the unified modular snake robot, study on how the wireless model will affect its efficiency is being done. This could automatically increase the area reach and traveling capabilities of the robot.
VII. ACKNOWLEDGMENT
We would like to express our sincere thanks and deep sense of gratitude to K. C. College of Engineering and Management Studies & Research for giving us an opportunity to integrate the learning from this graduate course.
We take this opportunity to express our profound gratitude and deep regards to our guide, Head of the Electronics and Telecommunication Department, Dr. Baban U. Rindhe and Guide -Asst. Prof. Christina Bage for exemplary guidance, monitoring and constant encouragement throughout our project work titled “Unified Modular Snake Robot”and also thanks to Department Faculty & Technical staff members for their time to time help for our project work.
Conclusion
We have focused on the structure maintenance of the snake robot throughout the project. A robust body was aimed and implemented. When provided with an adequate, sufficient and reliable power source the unified snake robot acts as very financially acceptable and flexible device to use in major national sectors. Unified modular snake robot can act as one of the most appropriate tools in solving modern day rescue problems, mineral exploration, wildlife research, operational research, man-made problems and natural sciences. It acts as a bridge between technology and nature to give out needed outputs and results of the operations performed. An intensive research to make the unified modular snake robot more efficient by studying in depth the subject of increasing its motion speed can open up a wider field where the snake
References
[1] Design of a Modular Snake Robot Cornell Wright, Aaron Johnson, Aaron Peck, Zachary McCord, Allison Naaktgeboren,Philip Gianfortoni, Manuel Gonzalez-Rivero, Ross Hatton, and Howie Choset. Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 [2] Design and Architecture of the Unified Modular Snake RobotCornell Wright, Austin Buchan, Ben Brown, Jason Geist, Michael Schwerin,David Rollinson, Matthew Tesch, and Howie Choset{cgwright, abuchan, hbb, jgeist, mbs2, drollins, mtesch, choset}@andrew.cmu.edu. 2012 IEEE International Conference on Robotics and AutomationRiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 [3] A survey on snake robot modeling and locomotion Aksel Andreas Transeth ,Kristin Ytterstad Pettersen and Pål Liljebäck,Published online by Cambridge University Press: 03 March 2009. [4] Snake Robot Obstacle-Aided Locomotion: Modeling, Simulations, and Experiments, Aksel Andreas Transeth; Remco I. Leine; Christoph Glocker; Kristin Ytterstad Pettersen; PÅl LiljebÄck. [5] Investigation of Snake Robot Locomotion Possibilities in a Pipe, Ivan Virgala, Martin john.3 June 2020, MDPI [6] Development and Control Experiment of the Trident Snake Robot , Masato Ishikawa; Yuki Minami; Toshiharu Sugie. IEEE/ASME Transactions on Mechatronics ( Volume: 15, Issue: 1, Feb. 2010) [7] Snake Robot Locomotion in Environments With Obstacles,Pål Liljeback; Kristin Y. Pettersen; Øyvind Stavdahl; Jan Tommy Gravdahl. IEEE/ASME Transactions on Mechatronics ( Volume: 17, Issue: 6, Dec. 2012) [8] Limbless locomotion: Learning to crawl with a snake robot, Dowling, Kevin J. Carnegie Mellon University. ProQuest Dissertations Publishing, 1997. 9918563. [9] Control of a Snake Robot for Ascending and Descending Steps, Motoyasu Tanaka; Kazuo Tanaka, IEEE Transactions on Robotics ( Volume: 31, Issue: 2, April 2015) [10] Developments in Snake Robot Modeling and Locomotion, Aksel Andreas Transeth; Kristin Ytterstad Pettersen, 2006 9th International Conference on Control, Automation, Robotics and Vision.
Copyright
Copyright © 2022 Rinku Kalsi, Christina Bage, Tejas Nisar, Aditi Karkare, Rahul Kashid. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42067
Publish Date : 2022-04-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online