

Ijraset Journal For Research in Applied Science and Engineering Technology
Vehicle Black Box Based on Can and IOT Protocol 2
Authors: Jayesh Rathod, Sanjana Thakur, Shital Waghotkar , Mala Yadav, Prof. Priyanka Sharma
DOI Link: https://doi.org/10.22214/ijraset.2022.42362
Certificate: View Certificate
Abstract
Present Automobiles are being developed with more of electrical and electronic parts for efficient operation. Recently, a vehicle was built with an analog driver-vehicle interface for indicating various vehicle status like speed, fuel level, Engine temperature etc. This project presents the development and implementation of a digital driving system for a semi-autonomous vehicle to improve the driver-vehicle interface along with black box features. It uses an Arduino based data acquisition system that uses ADC to bring all control data from analog to digital format and visualize through LCD. The communication module used in this project is embedded networking by CAN which has efficient data transfer. It also takes feedback of vehicle conditions like Vehicle speed, Engine temperature etc. And is controlled by the main controller. Additionally, this unit is equipped with GPS, GSM, ESP01 for various other purposes.
Introduction
I. INTRODUCTION
As the increase in the amount of electronic controller and instruments in the modern automotive, it is observed that the vehicle reliability is largely influenced by the complexity of circuit deployed in the control system. In addition, the maintenance is hard to carry out. From the layout point of view, the traditional electric systems use a single point-to point communication approach, which will inevitably result in large pet cabling problem. Therefore, the high-quality vehicles use CAN (Controller Area network) bus system to link all the controllers in a system to achieve unified management. That leads to easy data sharing and interoperability between different control systems. However, due to the complexity of vehicles, for example, sensors are deployed throughout the entire vehicle with diversified standards, the data within an automotive system are varied such as complex data format, heterogeneous data etc. It is facing a challenge that the gap among different systems is hard to fulfil. One solution, a gateway is a bridge to connect various CAN bus with different speed ratio. Furthermore, the vehicle system requires the information for the maintainer and driver. It is necessary to design an efficient, reliable gateway as well as its data processing system.
II. LITERATURE SURVEY
The author programmed Arduino to accept message from the bus. On the top of the Microcontroller, CAN Bus shield was mounted to acquire the CAN data. The data was saved in .csv format and reverse engineering was applied to make sense out of the data. But the data obtained, in such a way, is vague and irrelevant without the database file. Simulation and testing of automotive CAN bus has been discussed competently in. The use of CANoe and CANdb++ has been demonstrated for a development method for simulation of CAN network. The authors used CAPL (Communication Access Programming Language) for programming each virtual node and simulating function of real physical node to transmit and receive messages. Talks about different hardware and software solutions to collect data from CAN bus. It suggest techniques for frame data logging to generate files with smaller size. In the authors focus on the real time capability of the CAN bus data transmission. Frame delay using frame length and baud rate has been analyzed for different situations. Attempt to minimize this delay have been made by implementing the Dynamic Priority Algorithm. Multiple other Electrical Engineering enthusiasts have made efforts to hack the Automotive CAN using MATLAB, CANoe to sniff data like steering wheel angle, Engine Efficiency, Throttle position etc.
III. METHODOLOGY
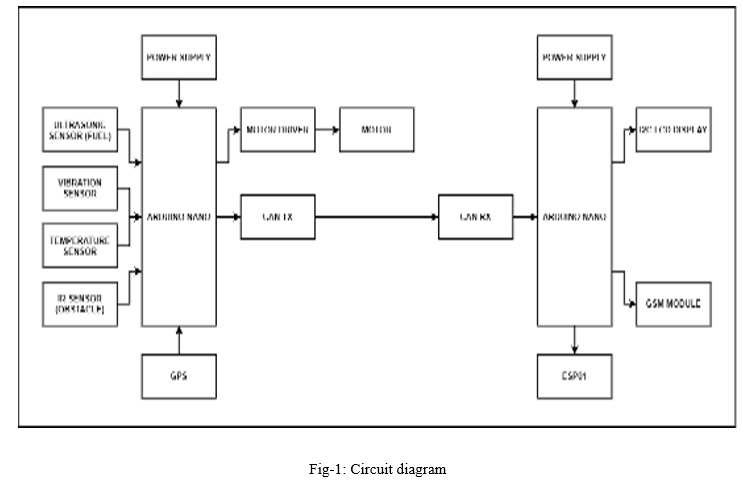
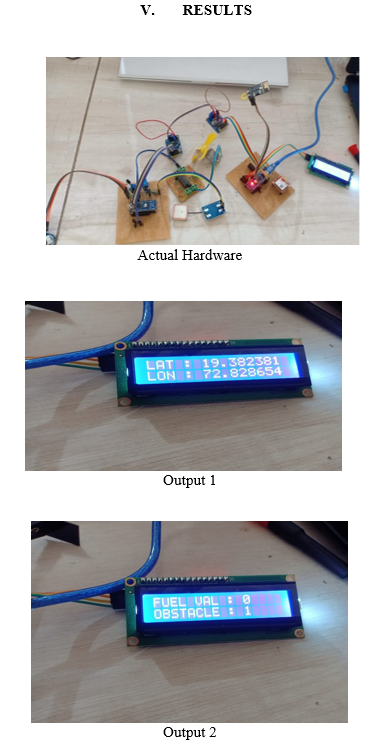
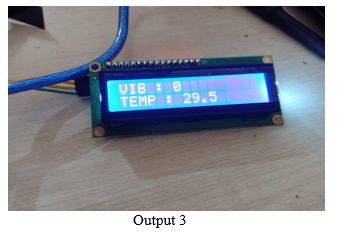
A "black box" is either physically installed in the car or downloaded as a smartphone app. It links to a GPS device. Along with this, various sensors are used to measure different parameters which help in identifying the real cause of any issue. The black box can also be used in order to monitor as well as prevent the issue before it occurs. The system consists of Arduino NANO and ESP01 as the microcontrollers. Arduino NANO collects data from various sensors and send this over CAN protocol. Ultrasonic sensor is used for fuel measurement. IR sensor is used for obstacle detection. If the obstacle is detected the speed of the motor is reduced and motor is finally stopped using L293D Motor Driver. Vibration sensor and Temperature Sensor are also used. Neo6M GPS module is used for live tracking of the vehicle. MCP2515 modules are used for data transmission. Received data is forwarded by Arduino NANO to I2C LCD. ESP01 is used to log data to Thing Speak. A GSM Module is also used to send data through SMS.
A. Hardware Required
- Arduino NANO
- ESP01
- Ultrasonic Sensor
- IR Sensor
- Vibration Sensor
- LM35 Sensor
- L293D Motor Driver
- Neo6M GPS Device
- GSM Module
- DC Motor
- CAN MCP2515 Module
- I2C LCD 16X2
- Header
- Connecting Wires
- Perf Board
B. Software Used
- Arduino IDE – For coding microcontroller
- MIT App Inventor 2 – For developing Android App
- Fritzing – For circuit designing
- ThingSpeak – For cloud storage
IV. IMPLEMENTATION
VI. ACKNOWLEGMENT
We would like to express our sincere thanks to Mrs. Priyanka Sharma and Mrs. Garima Gurjar for taking time from their busy schedule to provide us with great deal of help, support and encouraged us to work diligently at every aspects of our project. Their constructive suggestions helped us to successfully do the project. We have benefited a lot from their immense knowledge and experience. We would also like to thank the faculty of Department of Electrical Engineering who greatly assisted our research and for their valuable help.
Conclusion
This paper presents a black box system that is very useful for automobile industry. Digital control of the vehicle is an important criterion of modern cars. With the rapid development of embedded technology, high-performance embedded processor is penetrated into the auto industry, which is low cost, high reliability and other features to meet the needs of the modern automobile industry. This project introduces an embedded system with a combination of CAN bus systems. The proposed high-speed CAN bus system solves the problem of automotive system applications, has a certain practical value and significance. With Arduino Nano as the main controller and double gateway in a control computer within a car, it makes full use of the high-performance of microcontrollers, high-speed reduction of CAN bus communication control networks and instrument control so as to achieve full sharing of data between nodes and enhance their collaborative work. This system features efficient data transfer among different nodes in the practical applications. The proposed framework uses GPS and android applications by giving safe and secure trip to the travelers. Vehicle Black Box using IoT will be reliable, power efficient in the real time applications.
References
[1] International Journal for Research in Applied Science & Engineering Technology (IJRASET) ISSN: 2321-9653; IC Value: 45.98; SJ Impact Factor: 7.429Volume 8 Issue V May 2020 [2] International Journal of Advanced Research in Computer and Communication Engineering (IJARCCE) Vol. 5, Issue 3, March 2016. [3] EAI Endorsed Transactions on Internet of Things 04 2019 - 07 2019 | Volume 5 | Issue 19 [4] International Journal for Research in Engineering Application & Management (IJREAM) ISSN: 2454-9150 Vol-03, Issue 01, Apr 2017
Copyright
Copyright © 2022 Jayesh Rathod, Sanjana Thakur, Shital Waghotkar , Mala Yadav, Prof. Priyanka Sharma. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42362
Publish Date : 2022-05-07
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online