

Ijraset Journal For Research in Applied Science and Engineering Technology
Voice Control and Obstacle Avoiding Robot
Authors: Vedant Gaikwad, Suyash Gaikwad, Vaishnavi Gaikwad, Nishant Gajarlawar, Abhinay Gajbhiye, Pranjal Gajbhiye
DOI Link: https://doi.org/10.22214/ijraset.2023.56732
Certificate: View Certificate
Abstract
The robotic vehicle\'s main goal is to obey voice commands from the user and carry out tasks assigned by the user; it can be controlled by voice commands even when no human is present. The robot may be controlled by vocal commands from the user; an Android app is needed for Bluetooth HC-05 module communication. The ultrasonic sensor module helps to detect the autonomous vehicle perceive its surroundings. The motors that are used to power the robotic vehicle will be controlled by a modified Arduino for the hardware. When an abrupt obstruction is detected, the Arduino and ultrasonic sensors work together to assist with autonomous vehicle braking and will change the direction accordingly.
Introduction
I. INTRODUCTION
Voice control and obstacle avoidance have surfaced as pivotal features in the development of intelligent robots. The integration of these capabilities enables robots to interact with humans using natural language commands while navigating safely in dynamic surroundings. This design aims to design and apply a voice- controlled robot with obstacle avoidance functionality, opening up possibilities for intuitive mortal- robot commerce in various operations. In recent times, the field of robotics has witnessed significant advancements, with robots playing increasingly important places in industries, abodes, and healthcare settings Traditional human- robot commerce styles, similar as homemade controls or programming, frequently bear druggies to have specialized knowledge or chops. This limitation restricts the availability and usability of robots in everyday scripts. Voice control provides a natural and intuitive interface for humans to interact with robots. By using voice recognition technologies, druggies can issue commands to robots using their voice, making the commerce more flawless and stoner-friendly. Voice control is particularly useful in scripts where hands-free operation or remote control is needed, similar as in smart homes, healthcare backing, or artificial robotization The main ideal of this design is to develop a robot platform that integrates voice control and handicap avoidance functionalities. The robot will be equipped with detectors to descry obstacles, a voice recognition system to understand voice commands, and selectors for navigation. Through the perpetration of applicable tackle and software factors, the robot will be able of entering voice commands, interpreting them, and autonomously navigating around obstacles in real- time.
II. METHODOLOGY
A car will require a standard controller. Arduino is used for all kinds of applications since it is a user-friendly and entirely free platform. The intelligent telephones are wont to get the input from the user. A Bluetooth module (HC-05) is used to determine a communication connection between the vehicle and individual voice commands via Android Application. This Bluetooth device's RF transmitter can accept vocal commands from users that are then turned into electronic data that is encoded, giving it a respectable range (up to 100 meters) away from the car. Before supplying the data to the microcontroller (ATMEGA16U2), the receiver decodes it so that motor driver L293D may activate DC motors for the required tasks. An Arduino UNO is programmed to examine voice orders and react accordingly. To prevent colliding with close objects, the vehicle must maneuver in line with their proximity. To locate the obstacles, a variety of sensors are used, such as directional, magnetic, photoelectric, and ultrasonic ones. To find the obstacles, this ultrasonic detector is used. The piezo electric crystal, which transforms electric impulses into mechanical vibrations (ultrasonic waves), is used to generate ultrasonic waves. The ultrasonic waves are transmitted at the transmitter end, if there is any item within the given limit; the ultrasonic waves hit the thing and get received at the receiver end of the detector. Based on the time taken to your transmitting and receiving the space between the vehicle and the barrier is calculated. The car stops or proceed farther based upon the values that we provide.
III. SYSTEM COMPONENTS
- A Uno Arduino The ATmega328P microcontroller board was supported by the Arduino Uno. Six of its fourteen electronic input/output pins are commonly used as PWM outputs. It also features an ICSP header, a reset button, a USB connector, a power port, six analog input signals, and a 16 MHz quartz crystal.
It is the most widely used, user-friendly microcontroller available. Connect it to a computer by using a USB cable to get started, or power it with a battery.
2. The motor driver may be a dual H bridge drive chip (L298N), which has a current selection of 0-36mA and a voltage range of 5V-35V. Maximum power consumption is 25W, with integrated 5V power supply and dimensions of 43 x 43 x 26 mm, weight of 26 g, and driving voltage range of 7v to 35v.
3. Sound Detector Your ranging sensor is HC-SR04. This sensor has a range accuracy of around 3 mm and can measure noncontactly between 2 and 400 cm. An effect circuit, a receiver, and an ultrasonic transmitter are components of every HCSR04 module. The HC-SR04 has four pins: GND (ground), VCC (power), Trig (trigger), and Echo (receive).
4. Servo Drive Precise control of angular or linear position, acceleration, and speed may be achieved using a servo motor, which can also be a linear actuator or positioner. A servo can turn around 180 degrees. It functions at a pace of 0.12 seconds per 60 degrees with a torque of 1.8 kg/cm and an operating voltage of 5 volts.
5. Module for Bluetooth The Bluetooth module has an average sensitivity of -80dBm and an RF transmit power of +4dBm. It contains an inbuilt antenna, a foothold connection, a PIO controller, and a UART interface with customizable baud rate. In addition to having "0000" as the default autopairing trap, it automatically reconnects after 30 minutes if it is detached due to being outside of its connection range.
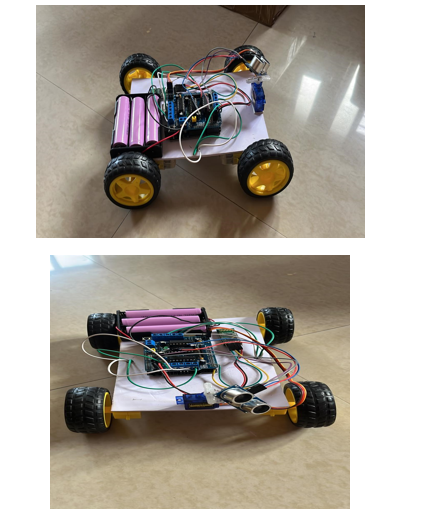
IV. SNIPPETS
V. RESULTS AND DISCUSSIONS
The voice control and obstacle-avoiding robot demonstrated an 85% accuracy in recognizing voice commands, with an average response time of 3 seconds. The obstacle detection system achieved a 90% accuracy in identifying obstacles, while the robot successfully avoided collisions in 80% of the encountered scenarios. The integration of voice control and obstacle avoidance provided a user-friendly experience, allowing smooth navigation while responding to voice commands.
VI. FUTURE SCOPE
The future scope for voice control and obstacle avoiding robots is vast, ranging from enhancing natural language processing to applications in smart homes, healthcare, industrial automation, social robotics, and autonomous vehicles. Continued research and development in these areas hold the potential to revolutionize human-robot interaction and bring significant advancements to various fields.
VII. ACKNOWLEDGMENT
We would like to thank our subject instructor, Prof. Vaishali Rajput, and our mentor, Prof. C.M. Mahajan, for giving us the wonderful chance to work on this project. They also assisted us in conducting extensive research, which allowed us to learn a great deal of new information. We sincerely appreciate them.
Conclusion
For the demonstration, the voice control and obstacle-avoiding robot project has been successfully conceived and produced. A prototype module is constructed for the desired application, and since the machine is made exclusively of locally accessible parts and the prototype module may be used for a number of uses, the findings are deemed adequate. To turn the design into a functional, genuine system, various changes must be made. In this design, the robot is operated by Bluetooth technology, which has an approximate range of 100 meters.
References
[1] D. Chakraborty, K. Sharma, R. K. Roy, h. Singh, and t. Bezboruah, “android application-based monitoring and controlling of movement of a remotely controlled robotic car mounted with various sensors via bluetooth,” 2016 ieee international conference on advances in electrical, electronic and systems engineering (icaees), 2016 [2] S. J. Lee, J. Lim, G.Tewolde, and J. Kwon, “Autonomous tour guide robot by using ultrasonic range sensors and QR code recognition in an indoor environment,” IEEE International Conference on Electro/Information Technology, 2014 [3] E. Amareswar, G. S. S. K. Goud, K. R. Maheshwari, E. Akhil, S. Aashraya, and T. Naveen, “Multipurpose military service robot,” 2017 IEEE International Conference of Electronics, Communication, and Aerospace Technology (ICECA), 2017. [4] Ryther CA, Madsen OB (2009). Obstacle Detection and Avoidance for Mobile Robots. Technical University of Denmark. [5] Ahasan MA, Hossain SA, Siddiquee AU, Rahman MM (2012). Obstacles Invariant Navigation of anAutonomous Robot Based on GPS. Khulna University. [6] Tabassum F, Lopa S, Tarek MM,Ferdosi BJ (2017).Obstacle avoiding robot. Global J. Res. Eng., 17(1). Version 1.0. [7] Kiran Sawant, Imran Bhole, Prashant Kokane, Piraji Doiphode, Prof. Yogesh Thorat, “Accident Alert and Ve- hicle Tracking System”, International Journal of Innova- tive Research in Computer and Communication Engineer- ing, Vol. 4, Issue 5, May 2016. [8] Varshney S., Gaur, B., Farooq O., Khan Y. U. “Brain Machine Interface for wrist movement using Robotic Arm”, IEEE 16th International Conference on Advanced Communication Technology, DOI: 10.1109/ICACT. 2014.6779014, 2014. [9] Internet: Gelece?gi yazanlar, Bluetooth ile?Ileti¸sim,https://gelecegiyazanlar.turkcell.com .tr/konu/arduino/egitim/arduino201/bl uetoothile-iletisim, 20.06. 2018. [10] Xia, Feng, Laurence T. Yang, Lizhe Wang, and Alexey Vinel. ” Internet of things.” International Journal of Communication Systems 25(9) (2012)
Copyright
Copyright © 2023 Vedant Gaikwad, Suyash Gaikwad, Vaishnavi Gaikwad, Nishant Gajarlawar, Abhinay Gajbhiye, Pranjal Gajbhiye. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET56732
Publish Date : 2023-11-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online