

Ijraset Journal For Research in Applied Science and Engineering Technology
Waiter Robot with Smart Ordering System
Authors: Heena Sheikh, Devendra Sutar, Sanjana Naik, Ashutosh Sonnad, Kiran Kumbar
DOI Link: https://doi.org/10.22214/ijraset.2022.46258
Certificate: View Certificate
Abstract
Today, technology is being used to make improvements in every domain. Due to rapid development of technology, in the field of work the robots have replaced human labor and solved many related problems. Young people choose to enjoy a variety of food outside which led to emergence of new ideas in the food service industry. Nowadays the demand for intelligent food delivery systems is increasing at a rapid rate. This idea is leading towards the improvement of the cost and efficiency of the food delivery system. This project aims at designing a low cost, efficient autonomous robot with a smart ordering system.
Introduction
I. INTRODUCTION
The field of autonomous robots is growing at a rapid rate. Robots are finding their way into the world nowadays, ranging from restaurants to industries. Autonomous robots are developed to be robust enough to work beside humans to carry out jobs efficiently. While they were in the works prior to the COVID-19 pandemic, demand for contactless delivery caused a boom. Covid-19 pandemic has confined all the restaurants and cafes to close their doors to dine-in guests. This outbreak may have limited business to many companies but if there is an alternative to offer contactless service can prevent these businesses from going astray. Robotic delivery services can promise contactless delivery, a highly sought-after service under mandates of social distancing. For people to be able to enjoy their favorite food at their favorite restaurants, there is a need for contactless delivery in the restaurants. Autonomous robot is the optimal solution to this problem. Main focus of this research is room mapping on the robot's controller, maximum weight that can be carried, robot summon algorithm and food delivery with online ordering system via website. Final goal of this study is to develop a robot which can deliver food in a room. Infrared sensor was used to detect where the lines are and ultrasonic sensor was used to prevent the robot from crashing when moving from one point to another. There are also emergency systems in the form of remote control, and an alarm to alert the user if the robot strays out of the line. The whole system is controlled by a microcontroller.
II. LITERATURE REVIEW
Endrowednes et. al [ 1 ] proposes an autonomous intelligent line follower robot controlled by a microcontroller. The robot is designed to serve 4 designated rooms usings RF remote and seven sensors are used to trace the line mapped. Main system consists of an actuator as the main motor, destination room button, line reader sensor, alarm and ultrasonic system.Haixia Zeng et. al [ 2 ] Proposed design of an efficient and intelligent food delivery robot, which can receive background instructions, choose the route, deliver the food, and automatically returns back to the start. Used a radio frequency module to locate the target, an infrared module to navigate, an ultrasonic sensor for obstacle avoiding, a WI-FI module for serial communication, and MSP430 was used as a control unit. The serving robot in this paper proposed by Shruti et. al [ 3 ] is designed in such a way that it takes orders as well as serves food at minimal human assistance. RPA is used by the system to perform tasks instinctively. Customer has to press a button on each table to summon the servexa robot. Ultrasonic sensors help in detecting obstacles if present in the robot's path, an OLED screen is used to display the menu and the customer is provided with a remote to input their order easily. Anjali et. al [ 4 ] presents an Autonomous Robot for delivering the orders in restaurants. The whole system is controlled by Raspberry Pi. Number of switches connected as inputs equals table numbers in restaurants. The robot is given a predefined path using unique identification of the table. In case of an obstacle encounter, an ultrasonic sensor is used. Raspberry Pi processes the input from switches and ultrasonic sensors and sends the data to motor drivers connected to two DC motors and one stepper motor.Zeashan H. Khan et. al [5 ] proposes the design and development of a waiter robot which is considered as a possible solution to restaurant automation. The desired order is transmitted on wireless network to the kitchen via menu bar. The menu bar is based on the LCD, Keypad and the Bluetooth module. It works on the concept of line following using four IR sensors, where two sensors are used for line following and the remaining two are placed at the side for the count of tables. The customer places the order using an electronic menu bar. This order is sent to the kitchen and reception using a communication network. Bluetooth module (HC-06) is used with a baud rate of 9600 bps. The waiter robot then transfers the food from the kitchen to the customer.
III. PROPOSED METHODOLOGY
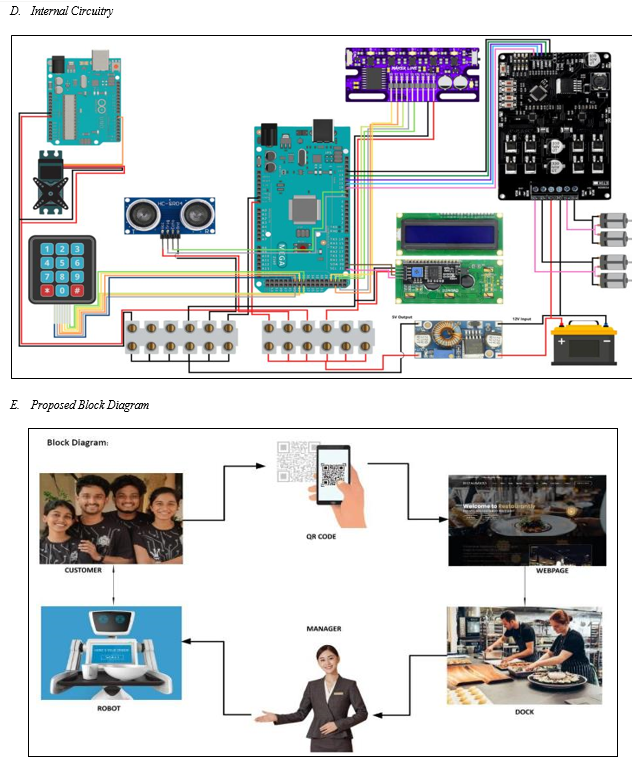
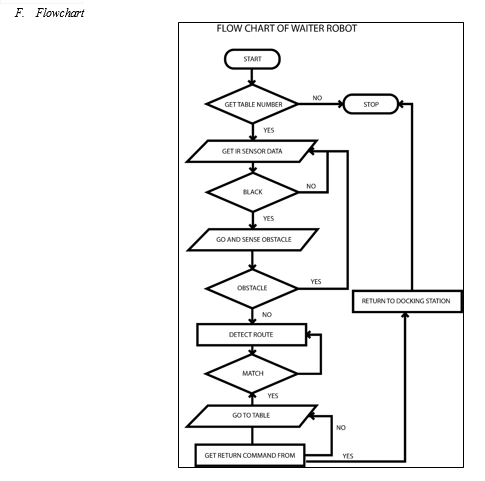
To achieve the objectives of the project, our first step was to identify the hardware and software requirements. For software requirements we identified the inputs that would be needed from the end user to create an account and order food. Various steps in software included creating an account, selecting a table number, ordering food, payments, order tracking. Along with order tracking we have also kept an option for reservation and takeaway. This would help the restaurant's manager to understand customers' requirements. Once the order was finalized, we decided to use Wix website to create our webpage. For hardware requirements, we decided to use Arduino mega 2560 because of the availability of digital I/O pins and large flash memory, which is the heart of the project. Next was to identify the various other components of the project. A motor driver required to drive the motor which has a current handling capability of 30A, sensor required to read the line and motion sensor to detect the presence of an obstacle, a display screen to make the user experience better, OG 555 motor to drive the bulky robot. Interfacing the components to the microcontroller was done step by step. The 4x3 keypad is used to enter the table number and return commands from the customer so that the robot can reach the dock station. Servo motor is used for head rotation which will make the robot more attractive. A 12v to 5v buck converter is used to step down the voltage. The body of the robot was done with iron material and plywood. We designed the shaft and the angle for the motor mount and the base. In the presence of an obstacle the robot will wait for a specified time and again check for the obstacle, if the obstacle is again found then the robot will bypass the obstacle and rejoin the previous route. The motors will be controlled with PWM signal so the sudden jerk is avoided and there will be no food falling. The robot used line follower technique to deliver the food, and a specific pattern will be drawn to detect the table number.
IV. SYSTEM DESIGN
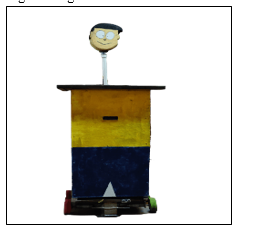
A. Robot Body
The robot's body is designed in such a way that it can support the weights of the objects that are implanted in it, including the battery, motor, components, load (food), and other weights. The stability of the robot on its wheels serves as the basis for the outer part's design. Adobe Illustrator was used to design the cage.
B. Hardware
- Orange OG555 50 RPM DC Motor
The Orange OG555 12V 50 RPM DC motor is a lightweight, compact sized high-performance DC motor with a rated torque of 346.8N-cm and a gear reduction of 180K having a 27mm long D shaped shaft with a diameter of 6mm and a hole. The Input Voltage range is from 6V to 15V and has a full load current of 3.38A.

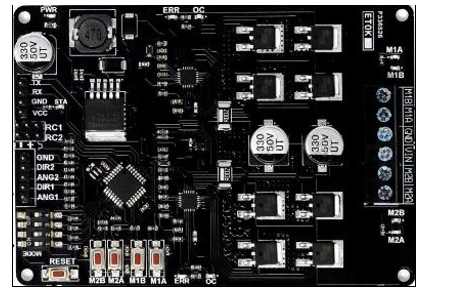
2. SmartElex 15D Smart Motor Driver
A motor driver takes the low-current signal from the controller circuit and amps it up into a high-current signal, to correctly drive the motor. SmartElex Smart motor driver 15D is a dual channel motor driver capable of supplying 15 amps continuous with peak currents up to 30 amps (10Sec) per channel. The Driver can be operated on radio control, analog, TTL serial and PWM modes.
Switching between any of 4 modes can be done with onboard 4 position DPDT mode switch. Onboard MOSFETs are switched at 16 KHz to ensure quiet operation. It has a microcontroller unit to provide smart features such as multiple input modes and current limit and thermal protection. The Driver is equipped with a temperature control feature where If the temperature of the board reaches 80 degrees, then motor speed becomes half and speed will be normal once the temperature reaches below 70 degrees. The motor driver will shut down at 100 degrees.
3. TowerPro SG90 1.2kgCm 180 Degree Servo Motor
A servomotor is a rotary or linear actuator that allows for precise control of angular or linear position, velocity and acceleration consisting of a suitable motor coupled to a sensor for position feedback. It requires a relatively sophisticated controller, often a dedicated module designed specifically for use with servomotors. The TowerPro SG90 is a digital servo motor which receives and processes PWM signals, rotates 90° in each direction (180° servo motor).
It equips sophisticated internal circuitry that provides good torque, holding power and faster updates in response to external forces. Its operating voltage is 3.0V to 7.2V.

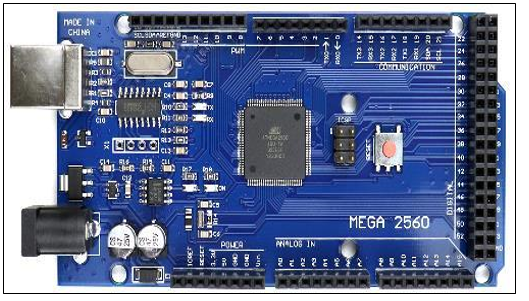
4. Atmel MCU ATMEGA16U2 MEGA 2560 R3
The ATmel MCU ATMEGA16U2 MEGA 2560 R3 is a micro-controller board based on the ATmega2560. It has a USB host interface to connect with Android based phones based on the MAX3421e IC. It has 54 digital input/output pins (of which 15 can be used as PWM outputs); 16 analog inputs; 4 UARTs (hardware serial ports); a 16 MHz crystal oscillator; a USB connection; a power jack; an ICSP header and a reset button. It can be powered via a USB connection or with an external power supply.
It features an ATmega8U2 program as a USB-to-serial converter.
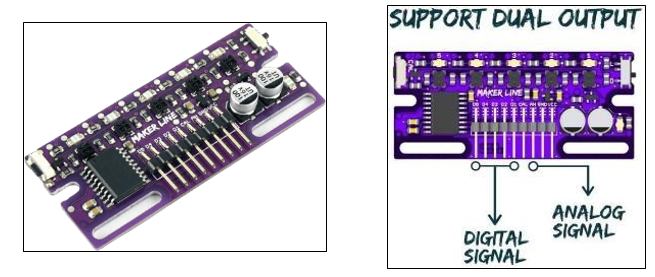
5. Cytron MakerLine Line Sensor
The Cytron Maker Line is a line sensor equipped with 5 IR sensors as an array and has an operating voltage of 3.3V to 5V. It is able to track lines from 13mm to 30mm in width. The line color is selectable as a light (White) or dark (Black) line. The calibration data is saved in EEPROM and it will still be intact even if the sensor has been powered off. Thus, Calibration only needs to be carried out once unless the sensor height, line color, or background color has changed.
The Cytron Maker Line also supports dual outputs: 5 x digital outputs for the state of each sensor independently which is similar to the conventional IR sensor. One analog output where its voltage represents the line position. Analog output also offers higher resolution compared to individual digital outputs. This is especially useful when high accuracy is required such as building a line following robot with PID control.
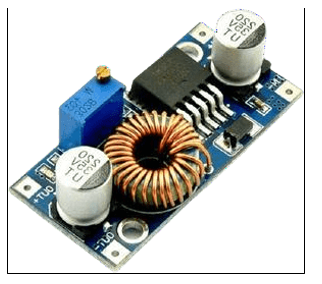
6. XL4005 DC-DC Step Down Buck Converter
Buck converters are one of the best ways to provide a regulated voltage from a battery since they don’t waste nearly as much energy in the process of dropping the input voltage as a linear regulator would waste. This module features the adjustable XL4005 step-down (buck) switching regulator, capable of driving a 5A load with line and load regulation.
It has a multi-turn trim pot that can be used to adjust the output voltage. The trim pot has 25 turns of adjustment; you can easily adjust the output of the module to exactly the voltage you need. It has an input voltage of 5V – 32V DC and output voltage of 0.8V – 30V DC with a maximum output operating current of 0 – 5A.
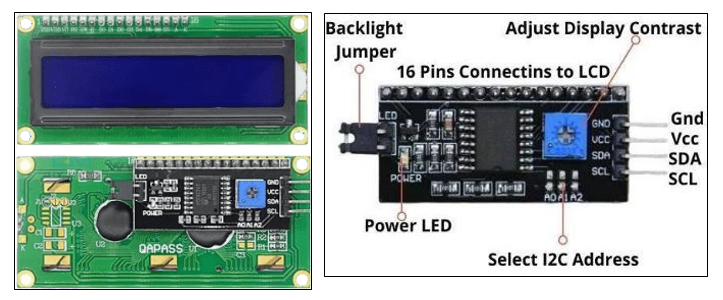
7. CDI600 LCD Display
The LCD1602 Parallel LCD is 16 characters by 2-line display that has a very clear and high contrast white text upon a blue background/backlight. It is very easy to interface with Arduino or other microcontrollers.
The I2C is a type of serial bus developed by Philips, which uses two bidirectional lines, called SDA (Serial Data Line) and SCL (Serial Clock Line). Both must be connected via pulled-up resistors. An I2C adapter is directly soldered right onto the display. The usage voltages are standard as 5V and 3.3V.
8. 4x3 Matrix Switch Keypad
This DC 12V 4×3 Matrix 12 keys Membrane Switch Keypad is high-quality soft touch feeling button keypad with 100 million life-stroke lifespans and good resistance to environmental conditions. This 12-button keypad provides a useful human interface component for microcontroller projects.
Convenient adhesive backing provides a simple way to mount the keypad in a variety of applications. The Keypad 4×3 features a total of 12 buttons in Matrix form. This is a membrane keypad with no moving parts. A female 7-pin berg connector is required for interfacing it with your microcontroller circuits. It has Ultra-thin design & adhesive backing provides easy integration.

9. Heat Shrink Tube
Heat-shrink tubing is a shrinkable rubber tube used to insulate wires, providing abrasion resistance and environmental protection for stranded and solid wire conductors, connections, joints and terminals in electrical work. It can also be used to repair the insulation on wires or to bundle them together, to protect wires or small parts from minor abrasion, and to create cable entry seals, offering environmental sealing protection.

10. Ultrasonic Sensor
It is an electronic device that measures the target object distance by emitting ultrasonic sound waves and then converts the reflected sound into an electrical signal. Ultrasonic waves travel faster than the speed of audible sound. It has two main components: the transmitter (which emits the sound using piezoelectric crystals) and the receiver (which encounters the sound after it has travelled to and from the target). Here we have used this sensor for obstacle detection.

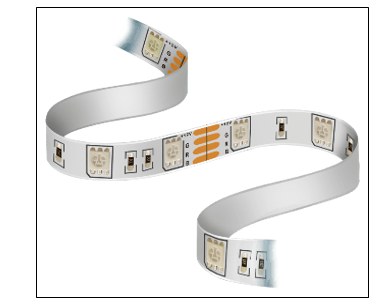
11. LED Strip
An LED strip light (also known as an LED tape or ribbon light) is a flexible circuit board populated by surface mounted light-emitting diodes (SMD LEDs) and other components that usually comes with an adhesive backing.
C. Software
- WIX: It allows users to create HTML5 websites and mobile sites through the use of online drag and drop tools. Users can add social plug-ins, e-commerce, online marketing, contact forms, email marketing, and community forums to their web sites.
- ARDUINO IDE: Arduino IDE (Integrated Development Environment) is the software for Arduino. It is used for writing code, compiling the code to check if any errors are present and uploading the code to the microcontroller. It supports the C/C++ language. It supports every available Arduino board including Arduino mega, Arduino Leonardo, Arduino Ethernet, ESP8266 and more. The format of Arduino is saved as .ino.
V. RESULT
A. Restaurant Website
The restaurant website allows customers to browse the details of the restaurant. The navigation tab of the website consists of a Home tab, a Menu tab, an About Us tab, a Reservations tab and a Login tab. The Home tab welcomes you into the website with a login tab at the top-right corner of the page which lets the user login into the restaurant’s website for ordering.

This model was made in a software called Blender. Blender is the free and open-source 3D creation suite. It supports 3D modeling, animation, simulation etc. It has been used to create a 3D model of the chassis frame. A lightweight aluminum channel is used to make the structure. The structure will house all the electronic modules and also will be used as a support for the food tray. The structure is strong enough to carry a weight of 6-7kgs on its body.
VI. FUTURE WORK
The robot may further be modified and can be made to follow a trilateration/wireless method of approach, further it can be fitted with a big digital screen and more powerful motors and chassis can be added for more sturdy handling. The motor can be fully made from ABS plastic for a more aesthetic approach. A vocal input can be given as well.
VII. ACKNOWLEDGMENT
The success of our work is incomplete unless we mention the names of our respected teachers who made it possible, whose guidance and encouragement served to beacon light and crowned our efforts with success. We would like to express our deep sense of gratitude to our project guide Mr. Devendra Sutar, Assistant Professor, Electronics and Telecommunication Department, Goa College of Engineering, for his guidance, advice and constant support throughout the course of our project. We wish to thank Dr. H. G. Virani, Head of Electronics and Telecommunication Department for his support and encouragement. We wish to thank Dr. R B. Lohani, Principal, Goa College of Engineering for his guidance. We wish to thank Dr. Akshay Nigalye, Workshop Superintendent, Mr. Vikas Naik, Mr.Sanjay Naik, Mr. Harshad Velingkar, Mr. Mikhil Chari and Mr. Vivesh Chari for their guidance and support. We are thankful to the teaching and non-teaching staff of the Electronics and Telecommunication Department for their generous help directly or indirectly.We are also thankful to our parents for their support and encouragement
Conclusion
A QR code is scanned to redirect to the restaurant website. The website allowed customers to order, takeaway and dine in the restaurant. A reliable payment gateway secured the payments from customers with email confirmations. When chosen to dine in, the food delivery robot with infrared sensors could trace the line from dock to the input tables and back without errors.
References
Engineering and Applied Sciences, Vol. 9, No. 11, November 2014, ISSN 1819-6608 [2] Haixia Zeng ,ziqing Zhang, and Yan Hong, \"Control system design of and intelligent food delivery robot\" , Department of Mechanical & Electronic Engineering Division, WenHua College, Wuhan, Huber, 403074, China.E3S Web of Conferences 267, 01059 (2021) [3] Shruti B P, Anuson Jose, Harshitha V, Sagar Shah, Shree Lakshmi, “SERVEXA: The Serving Robot”, Dept of Information Science and Engineering, Sri Krishna Institute of Technology, Bangalore, India; International Journal of Engineering Research & Technology (IJERT), ISSN: 2278-0181; NCETESFT - 2020 Conference Proceeding, Special Issue - 2020 [4] Anjali M. Yelasange, Husain K. Bhaldar, Kirti A. More, Anjali P. Katkar, \"Autonomous Robot for Delivering The Orders in Restaurants By using Raspberry Pi\", International Journal of Recent Technology and Engineering (IJRTE),ISSN: 2277-3878, Volume-8 Issue-6, March 2020 [5] M. Asif, M. Sabeel, Mujeeb-ur-Rahman, Z. H. Khan , “Waiter Robot - Solution to Restaurant Automation “ Department of Electrical Engineering Riphah International University, Islamabad MDSRC - 2015 Proceedings, 14-15 November, 2015 Wah/Pakistan
Copyright
Copyright © 2022 Heena Sheikh, Devendra Sutar, Sanjana Naik, Ashutosh Sonnad, Kiran Kumbar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET46258
Publish Date : 2022-08-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online