

Ijraset Journal For Research in Applied Science and Engineering Technology
War Field Spying Robot with Wireless Camera
Authors: Mallikarjun Mudda, Jahangir Badhasha, D. Vamshi Krishna, B V Ramana Reddy, R. Sampath Mahendra
DOI Link: https://doi.org/10.22214/ijraset.2022.44343
Certificate: View Certificate
Abstract
As long as there are technological advancements, tactical powers will use these headways to reduce the risk of defeats and defeat their opponents. With the advancement of modern technology, it is increasingly dependent on the use of cutting-edge weapons or hardware. Advanced mechanics is one of the hottest fields of the modern era, with governments focusing on it for military purposes in both war and peace. They\'ve been needed for a long time for demining and salvage work, but they\'ve recently been repurposed for battle and spy operations. Today\'s military forces use a variety of robots for a variety of tasks, ranging from mine detection to rescue operations. They\'ll be utilized for reconnaissance and surveillance in the future, as well as logistics and support, communications infrastructure, forward-deployed offensive operations, and tactical decoys to hide manned assets manoeuvring. To make robots more effective in the unpredictable chaotic environment of the battlefield, researchers are lookinginto many characteristics of robots in laboratories to see if they can do their jobs as well as a human-operated machine. The latest technology, software, and hardware are being explored in order to develop powerful and intelligent robots for various war-fighting activities. This paper discusses the employment of robotic technologies in combat surveillance. These robots are being tested to see if they can work in a self-contained, cooperative, and controlled environment . Our main focus is on the uses of robots in conflict, harmony, and their impact on society.
Introduction
I. INTRODUCTION
Determined to support cutting-edge innovation that supports rapid innovation, high-level control of robots and the development of new control ideas. The acknowledgement of some specialized improvement alongside the demand for elite execution robots is projected to result in a robot that is faster, more reliable, exact, and more insightful, which can be created using cutting-edge control calculations, robot control gadgets, and new drivers. Previously, robots were controlled by wired networks; however, in order to make robots more client-friendly, now they are designed to do client-directed task. As a result, we may use android as a mixed media to control the simple robot and meet the requirements. The goal of our project is to develop a robotic vehicle based on wi-fi technology for remote action connected with a camera put on the robot for observing surroundings. For desired action, the robot is implanted with an Arduino board, and it is mostly used for spying. The orders are sent through the Wi-Fi module. We give commands to the getting module to control the robot's development to the right, left, ahead, or downward. Two engines are attached to the Arduino Uno board in the robot's getting module to regulate its development via an engine driver IC. The collector gathers and analyses the received signals before passing them on to the microcontroller, which uses the engine drivers to drive the DC engines. The remote camera that is used for surveillance purposes also works in complete darkness using IR lighting. PDA controlled robots, where the evolution of the robot is constrained by a robot based on android stage, are unmistakable uses of this notion in such robots. The AT orders and information are sent from the advanced mobile phone to the Arduino, which then operates the engine through engine driver L283D. Left, right, forward, and backward movements are made by the robot. The communication and controlling is through network. The information is transmitted via the Wi-Fi module.
B. METHODOLOGY
To build a field spying robot constrained from a base with deal, we only needed the going with pieces.
- Sensor Unit: A Night Vision Camera from afar: A transmitter unit is included in addition to the features of a crucial camera. It takes photos and capture the video and sends them to the transmitter as cutting-edge signals, which are picked up by the locater unit connected to the TV or computer. The camera can be as far away as 30 miles from the intended recipient. A night vision camera can be illuminated by increasing the visible light using picture intensifiers, or by using infrared light emitted directly by objects (warm imaging) or infrared light reflected by objects (near infrared illumination).
- A Receiver Unit: The robot includes a receiver unit that receives the requesting signals and uses them to operate the motors and, as a result, the robot unit.
- Actuators: Two DC motors serve as actuators, allowing the robot to move in both inverse and positive directions.
- Control Unit: It includes a distant transmitter unit with a microcontroller, encoder, and RF module, as well as a recipient unit with an RF beneficiary module, a microcontroller, and a decoder that is added to the circuit.
III. LITERATURE SURVEY
Starting with the most fundamental and crucial term in the project, the word 'ROBOT.' This word comes from the salvic word ROBOTA, which means "labour." Simply put, a robot is a machine capable of performing specific tasks either automatically or manually, or both at the same time. In general, the robots used on those battlefields are machines that help remove mines and other obstacles in war zones on their own, and they are occasionally used to spy on enemies. Nowadays, as technology improves, robots can be seen being used in military operations as well, though they are not fully automated and are instead controlled remotely.
In military operations, three types of machines are used: UGVs (unmanned ground vehicles), UAVs (unmanned aerial vehicles), and UUVs (unmanned underwater vehicles) (Unmanned Underwater Vehicle)
IV. EXISTING SYSTEM
The existing system has used the 8051 micro controller and Arduino board in order to design the robot.
Our system contains the Arduino and wi-fi module.
The existing system does contains metal detector sensor
And it only sends pictures of the field.
V. PROPOSED SYSTEM
In proposed system user can control the robot by using the blue control screen app from the android mobile. We use a ESP32 camera this is connected by an WIFI module receiver section. The receiver module is connected to a Laptop or a Monitor. The video surveillance will be monitored by a person. The video can be recorded for future purposes. Through this robot we can easily spy the remote areas as it can be used for military purposes and other rescue operations.
The existing system does not transmit the continuous live video but our system will transmit the continuous video through long distances. And our system also contains the IR and Smoke sensor attached to it to provide better results.
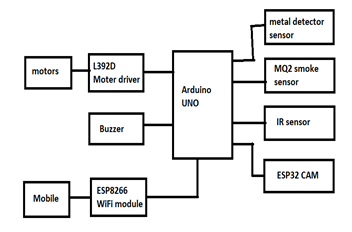
VI. BLOCK DIAGRAM
VII. HARDWARE SPECIFICATIONS
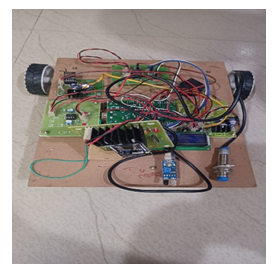
For the designing of advanced vehicle security system,we used some components. These components are attached together to form the final product.
The hardware components used are:
- Power Supply: The power supply area is the section that provides +5V to the working parts. The IC LM7805 is used to provide a constant force of +5V.
- Transformer: A transformer is a device that transforms electric controlled energy from one exchanging flow circuit to one or more significant different circuits, increasing (moving forward) or decreasing (moving down) the voltage.
- Voltage Regulator: A voltage controller is a circuit that generates and maintains a constant output voltage regardless of changes in the input voltage or load conditions. Voltage controllers (VRs) keep the voltages from a power supply within a range that is comparable to other electrical components.
- Arduino UNO Board: Arduino UNO is a low-cost, flexible, and easy-to-use programmable open-source microcontroller board that can be used in a variety of electronic projects. As a result, this board can communicate with other Arduino boards, Arduino safeguards, Raspberry Pi boards, and potentially transfers, LEDs, servos, and engines. The unit's working voltage is 5V, which starts the microcontroller and its accompanying hardware at 5V at the same time as the enter voltage levels range from 6V to 20V and the embraced enter voltage stages range from 7V to 12V.
5. IR Sensor: An infrared sensor is an electronic device that sends out signals to differentiate between two or three different environmental factors. An IR sensor can assess the power of an article in the same way that a human can sense the turn of events. Such sensors, which are known as dormant IR sensors, measure infrared radiation rather than emitting it. The articles all emit a warm radiation that is similar to infrared. These radiations are invisible to the naked eye, but they can be seen by an infrared sensor. The pointer is simply an IR photodiode sensitive to infrared light of a similar frequency to that delivered by the IR LED, while the producer is essentially an infrared LED (Light Emitting Diode). When IR light strikes the photodiode, the confirmations and yield voltages change in proportion to the size of the IR light received.
6. Metal Detector: Metal identifier sensors are used to detect the presence of a metal body in the immediate vicinity; these sensors can detect the item even if it is hidden underground. Metal makes the LED shine or sends messages to the signal when it is present. In our venture, such sensors are used to detect mines and bombs so that we can stay clear of them or diffuse the bomb.

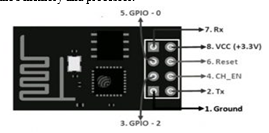
7. esp8266 wi-fi Module: An ESP8266 Wi-Fi module is a SOC microchip that is primarily used to develop end-point Internet of Things (IoT) applications. It's referred to as a stand-alone wireless transceiver, and it's inexpensive. It is used to connect various embedded systems applications to the internet. The ESP8266 Wi-Fi module was developed by Espressif Systems to support both TCP/IP and microcontroller connect to any Wi-Fi network. It provides solutions to meet the cost, power, performance, and design requirements of the IoT industries. It can function as a slave or as a stand-alone application. If the ESP8266 Wi-Fi is formatted as a slave to a microcontroller host, it can be used as a Wi-Fi adaptor for any microcontroller that supports UART or SPI. When ESP8266 is used as a stand-alone application, it performs microcontroller and Wi-Fi network functions. To communicate with the ESP8266 Wi-Fi module, the microcontroller requires a set of AT commands. As a result, it is designed with AT commands software to enable Arduino Wi-Fi functionality, as well as the ability to load various software to create one's own application on the module's memory and processor.
8. MQ2 Gas Sensor: The MQ2 gas sensor is an electronic sensor that detects the presence of gases such as LPG, propane, methane, hydrogen, alcohol, smoke, and carbon monoxide in the air. Chemiresistor is another name for MQ2 gas sensor. When it comes into contact with the gas, the resistance of the sensing material changes. The detection of gas is based on a change in resistance value. MQ2 is a gas sensor made of metal oxide semiconductors. A voltage divider network in the sensor is used to measure gas concentrations in the gas. This sensor runs on a 5V DC power supply. It can detect gases with concentrations ranging from 200 to 10,000 parts per million.
9. ESP32 CAM: With the ESP32-S chip, the ESP32-CAM is a very small camera module. The camera on the module is an OV2640. It also has a number of GPIOs that can be used to connect peripherals. Many companies have created boards for the ESP32-CAM module, but AI-board Thinker's is the most popular. A 32-bit CPU with a frequency of up to 240MHz powers the controller. It has a 520 KB internal SRAM and a 4 MB external PSRAM. It has a Wi-Fi + Bluetooth/BLE SoC module that is 802.11b/g/n. It does include Wi-Fi image upload. There's a voltage regulator IC and a PSRAM chip onboard.

10. Buzzer and DC Motors: A sound hailing device, such as a ringer or beeper, can be mechanical, electromechanical, or piezoelectric (piezo for short).
A DC motor, also known as a direct stream motor, is an electrical machine that converts electrical energy into mechanical energy by creating a direct stream-constrained attractive field. A beautiful field is created in the stator of a DC motor when it is controlled.
VIII. SOFTWARE
In this project, we used Arduino cc programming and combined the robot's utility with Arduino programming.
The Arduino programming language is very similar to our c language but has a different linguistic structure.
The code that we have written in Arduino programming has been accumulated and will be converted to hex code. Through the link, this hex code is plugged into the Arduino.
IX. WORKING
The robot is connected through the wi-fi module.
Through wi-fi module we can control the movement of the robot like front, back, left, right directions.
We have attached the ESP 32 cam and it is connected to the wi-fi module. Though the IP address we can continuously moniter the video.
The system contains the metal detector sensor which will detect the bombs under ground and sends the information to the user.
And the system contains the IR sensor so that it can detect the obstacles and sends the information. And it also contains the mq2 smoke sensor it will detect the smoke and harm full gases and sends information.
The robot is a genuinely organized, which hard, unbending areas of strength for and is truly useful in guard space which is truly required and fundamental and goes about as a day-to-day existence friend in need. Along these lines, this is our principal objective of venture.
X. SIMULATIONS AND RESULTS
XI. FUTURESCOPE
- The measure of chance can be diminished in war fields
- Using a graphical user interface, the robot can be Controlled from any location
- We make a natural up the move based on data.
- It can also be controlled via a mobile application.
- We can also control it using voice commands Without any problems.
Conclusion
Consistently our fighters will stroll into the passing, they will keep their life in danger to save our lives. It\'s more significant for us (impending age) to focus on this part and assume this as liability to diminish the gamble they take up, which can really help them in dissecting all the situation with challengers before they enter the field. We presented the WAR FIELD SPY ROBOT WITH WIRELESS NIGHT VISION CAMERA USING ANDROID APPLICATION architecture, implementation, and demonstration, which is based on embedded systems and some applicable software programs that can monitor the surroundings. The receiver section can be placed anywhere, and the robot can be easily navigated in all directions. This will aid in the more effective and efficient use of human resources. Because the system is based on Wi-Fi, it can be used over long distances. Other Sensors could be added as a way to improve the situation. By sending these robots before entering new areas, we can save the lives of military personnel. This model of a robot has various applications that include military missions, wireless security and surveillance and search and rescue operation.
References
[1] Joshi, Deepali V. Mahajan, “Arm 7 Based Theft Control, Accident Detection &Vehicle Positioning System,” International Journal of Innovative Technology and Exploring Engineering (IJITEE) ISSN: 2278 - 3075, Volume -Issue-2, July 2014. [2] Mr. S. Iyyappan, Mr. V. Nanda Gopal, “Automatic Accident Detection and Ambulance Rescue with Intelligent Traffic Light System,” International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering Vol. 2, Issue 4, April 2014. [3] Montaser N. Ramadan, Mohammad A. Al Khedhe r, Senior Member, IACSIT, and Sharaf A. Al - Kheder, “Intelligent Anti - Theft and Tracking System for Automobiles,” International Journal of Machine Learning and Computing, Vol. 2, No. 1, February 2013. [4] Nirav Thakor, Tanmay Vyas, DivyangShah, “Automatic Vehicle Accident Detection System Based on ARM &GPS,” International Journal for Research in Technological Studies, ISSN: -Applied (Online) Vol-1, Issue -1, Dec 2012. [5] Varsha Goud, V. Padmaja, “Vehicle Accident Automatic Detection and Remote Alarm Device,” International Journal of Reconfigurable and Embedded Systems (IJRES). Vol. 1, No. 2, July 2012, pp. 49~54 ISSN: 2089-4864. [6] J. M. Hu, J. Li, and G. H. Li, “Automobile anti - theft system based on GSM and GPS module,” presented at the Fifth International Conference on Intelligent Networks and intelligence Systems, Tianjin, Nov. 1201 [7] Mr. Lokesh Mehta, Mr. Pawan Sharma ?Spy Night Vision Robot with Moving Wireless Video Camera?. International journal of research in engineering technology and management (IJRETM), 2014. [8] Abdus Samad1, JadhavDevidasDasharath, DhaigudeMadhukar Kumar ?An Intelligent Combat Robot? International Journal of Advanced Research in Computer and Communication Engineering Vol. 3, Issue 5, May 2014 [9] AaruniJha, Apoorva Singh, RavinderTurna, Sakshi Chauhan -War Field Spying Robot With Night Vision Camera. [10] Mallikarjun Mudda, “Review on Brain Tumor Detection and Analysis Using MRI Multi Slice Sequences and further progress proposed” in International Journal of Multidisciplinary Educational Research(IJMER), Volume: 4, Issue: 10, October, 2015 with International Scientific Indexing Value: 2.286. [11] Mallikarjun Mudda , R. Manjunath & N. Krishnamurthy (2020): Brain Tumor Classification Using Enhanced Statistical Texture Features, IETE Journal of Research, DOI: 10.1080/03772063.2020.1775501 [12] Mallikarjun Mudda, R. Manjunath & N. Krishnamurthy “Enhanced Image Registration Technique for Medical Image Segmentation”, in International Medical Sciences Academy, Vol 30; No. 3, July – September 2017. [13] Xin Liu, Zhuangzhi Yan and Hongbing Lu, Performance Evaluation of a Priori Information on Reconstruction of Fluorescence Molecular Tomography, Digital Object Identifier, Vol.3, 2015. [14] Mallikarjun Mudda , “Preliminary Detection of Lung Diseases in Pediatric Population: A Soft Computing Approach” International Journal of Recent Technology and Engineering (IJRTE), ISSN 2277-3878, September 2019 [15] Mallikarjun Mudda,. Syed Jahangir “Target Tracking System: PAN TILT”. International Journal of Engineering and Advanced Technology (IJEAT) ISSN: 2249-8958, Volume-8 Issue-5, June 2019.
Copyright
Copyright © 2022 Mallikarjun Mudda, Jahangir Badhasha, D. Vamshi Krishna, B V Ramana Reddy, R. Sampath Mahendra. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44343
Publish Date : 2022-06-15
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online