

Ijraset Journal For Research in Applied Science and Engineering Technology
Weed Plucking Robot with Wireless Technologies
Authors: Mallikarjun Mudda, Sandeep Hemdribhotla, T. Krishna Chaitanya, T. Rahul
DOI Link: https://doi.org/10.22214/ijraset.2022.40499
Certificate: View Certificate
Abstract
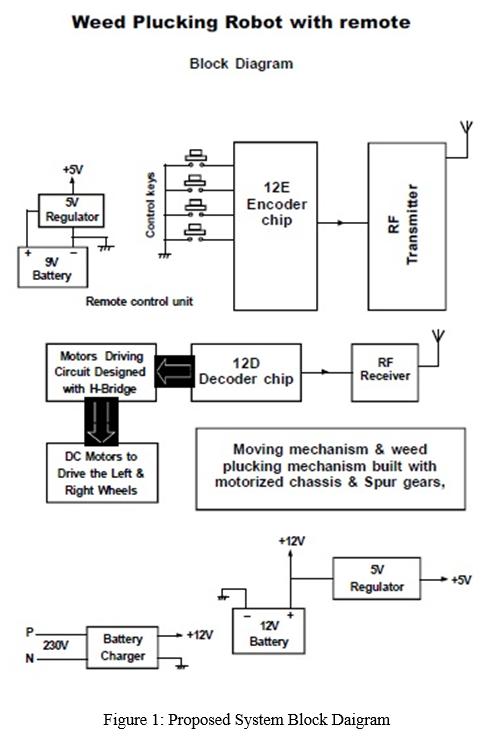
The main function of this robot is to remove the unwanted tiny plants or grass from the main crop, this system is very useful for farmer which avoids lot of manual work. Plucking weeds manually is very painful activity and also consumes lot of time and therefore this mechanism is designed. Since it is a prototype module, basic version of grass or tiny weeds plucking mechanism is designed with spur gears. The moving mechanism is constructed with motorized wheels, for this purpose 30RPM motors are used. The mechanism is designed to move in all directions including reverse direction. The plucking mechanism designed with spur gears is attached with another motor shaft. Two spur gears are used and are meshed with each other, when the vehicle is moving and when the gears are rolling, the grass or tiny weeds will be removed by the gear mechanism. The demo module is constructed with small spur gears, with this the basic concept can be proved and it is not a full fledged mechanism. With the help of a remote control unit constructed with 12E, 12D chips & RF transmitter, entire machine can be controlled. H Bridge IC is used to drive the wheel drive motors through remote and weed picking mechanism must be activated manually through third DC motor. Moving mechanism is controlled through 2 DC motors and is controlled independently by which mechanism will be moved in all directions. 12V, 1Ah Rechargeable battery is used to run the entire system and this battery can be charged through ac adapter. The remote is constructed using four keys to move the robot forward, reverse, right and left directions. By pressing any control key in the remote unit, the encoder chip generates proportionate digital code, which is fed to the RF transmitter for transmitting the data. In the receiver, the received data will be decoded by the 12D IC and based on this code this chip enables the H Bridge IC by which the corresponding motor rotates in one direction. Likewise both DC motors will be controlled independently according to the command code received by the communication system.
Introduction
I. INTRODUCTION
The weed plucking robot designed here is nothing but a remote control vehicle which can be defined as a vehicle that is remotely controlled, which moves in all directions according to the command signals received from its corresponding transmitter. The main purpose of this vehicle is to serve the formers in their agriculture fields to remove the unwanted tiny weeds. Often a radio control device and RF modules operates at a high frequency will be used. A remote control vehicle or RCV differs from a robot in that the RCV is always controlled by a human and takes no positive action autonomously. This project work mainly focuses about controlling of a Robot or land rover using remote using RF technology. These kinds of radio-controlled vehicles/robots are quite useful for many applications. To prove the concept for one useful application here this vehicle is designed to pluck the weeds. The weed plucking mechanism is designed with spur gears. In addition these vehicles can be equipped with other agricultural tools like plough, but since it is a prototype module and to reduce the cost, here a simple robot is constructed with weed plucking mechanism for the live demonstration which moves in all directions according to the instructions passed from the transmitter i.e., a remote. The system is designed as efficient, cost effective & easy to operate and flexible for further improvements.
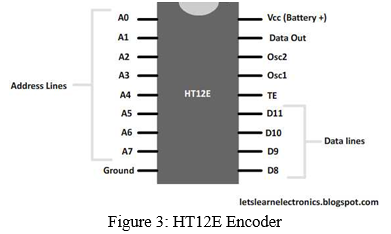
Conventionally, wireless controlled robots use RF circuits, which have a limited working range, limited frequency range, limited features and limited control options. While operating in real applications for specific functions, the Encoder and Decoder chips used here can offer 4 control options by which the vehicle moves in all directions. It provides the advantages of robust control, un-limited working range depending up on the coverage area of the wireless network, no interference with other signals. In general, any simple communication system that uses microcontroller chip transmits the digital data will be in the form of 8 bit data, this data will be changed by selecting the control key that is to be activated as a input source to the controller chip, in similar manner here also the Encoder chip 12E used for transmitting the data performs the same function. In the case of microcontroller program must be prepared and burn the chip, where as in the case encoder chip, with the help already pre-defined logic existed in the chip, same output can be obtained as in the case of microcontroller.
One of the main form of communication that has been in use since 19th century is Radio wave communication. Radio waves have found its place in each and every field whether is being medical, electronics or space. In general it exists in every system in one or the other form. Radio Frequency (RF) communication has a ton of applications. It can be used in robots, home automation, special effects, or in any application that needs the wireless transfer of data. The data transfer speed varies based on the receiver and transmitter.
The RF transmitter that is used here is intended to transmit the digital data, as the encoder used here generates digital data in the form of bits, this data will be transmitted. The message signal can be of an analog or digital type. An analog signal is one in which both amplitudes and time varies continuously over their respective intervals. A speech signal, a television signal, and a signal representing atmospheric temperature at some location are examples of analog signals. In a digital signal, on the other hand, both amplitude and time take on discrete values. Computer data or digital data produced by an embedded system are examples of digital signals
II. LITERACY SURVEY
With the coming of the Industrial Revolution and the development of more complicated machines, farming methods took a great leap forward. Instead of harvesting grain by hand with a sharp blade, wheeled machines cut a continuous swath. Instead of threshing the grain by beating it with sticks, threshing machines separated the seeds from the heads and stalks. The first tractors appeared in the late 19th century.
A. Steam Power
Power for agricultural machinery was originally supplied by ox or other domesticated animals. With the invention of steam power came the portable engine, and later the traction engine, a multipurpose, mobile energy source that was the ground-crawling cousin to the steam locomotive. Agricultural steam engines took over the heavy pulling work of oxen, and were also equipped with a pulley that could power stationary machines via the use of a long belt. The steam-powered machines were low-powered by today's standards but, because of their size and their low gear ratios, they could provide a large drawbar pull. Their slow speed led farmers to comment that tractors had two speeds: "slow, and damn slow."
B. Internal Combustion Engines
The internal combustion engine; first the petrol engine, and later diesel engines; became the main source of power for the next generation of tractors. These engines also contributed to the development of the self-propelled, combined harvester and thresher, or combine harvester (also shortened to 'combine'). Instead of cutting the grain stalks and transporting them to a stationary threshing machine, these combines cut, threshed, and separated the grain while moving continuously through the field.
C. Types
Combines might have taken the harvesting job away from tractors, but tractors still do the majority of work on a modern farm. They are used to push implements—machines that till the ground, plant seed, and perform other tasks. Tillage implements prepare the soil for planting by loosening the soil and killing weeds or competing plants. The best-known is the plow, the ancient implement that was upgraded in 1838 by John Deere.
Plows are now used less frequently in the U.S. than formerly, with offset disks used instead to turn over the soil, and chisels used to gain the depth needed to retain moisture. The most common type of seeder is called a planter, and spaces seeds out equally in long rows, which are usually two to three feet apart. Some crops are planted by drills, which put out much more seed in rows less than a foot apart, blanketing the field with crops. Transplanters automate the task of transplanting seedlings to the field. With the widespread use of plastic mulch, plastic mulch layers, Transplanters, and seeders lay down long rows of plastic, and plant through them automatically. After planting, other implements can be used to cultivate weeds from between rows, or to spread fertilizer and pesticides. Hay balers can be used to tightly package grass or alfalfa into a storable form for the winter months. Modern irrigation relies on machinery. Engines, pumps and other specialized gear provide water quickly and in high volumes to large areas of land.
Similar types of equipment can be used to deliver fertilizers and pesticides. Besides the tractor, other vehicles have been adapted for use in farming, including trucks, airplanes, and helicopters, such as for transporting crops and making equipment mobile, to aerial spraying and livestock herd management.
D. New Technology
The basic technology of agricultural machines has changed little in the last century. Though modern harvesters and planters may do a better job or be slightly tweaked from their predecessors, the US$250,000 combine of today still cuts, threshes, and separates grain in the same way it has always been done. However, technology is changing the way that humans operate the machines, as computer monitoring systems, GPS locators, and self-steer programs allow the most advanced tractors and implements to be more precise and less wasteful in the use of fuel, seed, or fertilizer. In the foreseeable future, there may be mass production of driverless tractors, which use GPS maps and electronic sensors.
E. Open Source Agricultural Equipment
Many farmers are upset by their inability to fix the new types of high-tech farm equipment. This is due mostly to companies using intellectual property law to prevent farmers from having the legal right to fix their equipment (or gain access to the information to allow them to do it). This has encouraged groups such as Open Source Ecology and Farm Hack to begin to make open source agricultural machinery.
III. PROPOSED SYSTEM AND METHODOLOGY
A. Transmitter
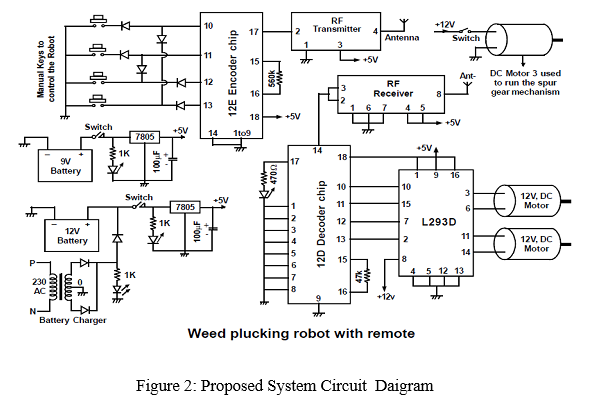
The transmitting unit is a hand held Equipment, It is designed with 12E Encoder chip and the circuit is designed to operate at 5V DC, and the battery used in the card is 9Vpack, therefore with the help of a voltage regulator of 7805, constant supply of +5V is derived. Supply to the circuit is provided through the ON/OFF switch. Whenever the switch is activated, supply will be provided to the controller to which four push to ON keys are connected to move the robot in the desired direction i.e., forward, reverse, right and left directions. By pressing any of the keys, digital data of the particular direction is delivered through output pin of the encoder chip. The output of the chip is modulated at 433.92 MHz frequency produced by the RF transmitter, transmits the binary data to space in a particular range based on the antenna used. Any digital data generated by the transmitter is transmitted as it is, and once the code is finalized, according to that data receiving unit designed with 12D decoder chip drives the motors through the H Bridge IC. The main function of the data transmitting section is to generate binary code that is to be transmitted through RF transmitter. The binary code produced by the Encoder that is transmitted through amplified modulated input signal. Each key in the transmitting unit has a unique code that will be transmitted. Based on this code, the other Decoder chip used in the receiving module decodes this data and energizes the motors through its drive circuit designed with L293D H Bridge IC. The output of the Encoder is fed to RF transmitter, for radiating the pulsating energy into air. The function of a radio frequency (RF) transmitter is to modulate, up convert, and amplify signals for transmission into free space. An RF transmitter generally includes a modulator that modulates an input signal and radio frequency signal. The radio frequency power amplifier is coupled to an antenna that transmits the amplified power amplifier that is coupled to the modulator to amplify the modulated input modulated input signal. The RF transmitter used in our project is TWS-434A. This RF transmitter transmits data in the frequency range of 433.92 MHz with a range of approximately 200-foot (open area) outdoors. Indoors, the range is approximately 80 foot, and will go through most walls. TWS-434A has features which includes small in size, low power consumption i.e. 8mW and operate from 1.5 to 12volts. DC is excellent for applications requiring short-range RF signal. The data is to be sent through amplitude modulation with the carrier RF signal.
B. Receiver
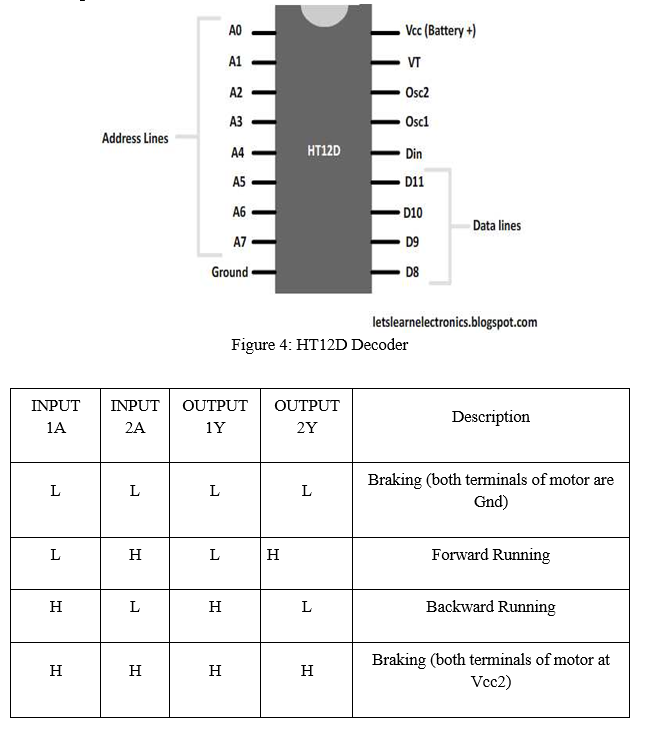
The data-receiving module i.e., the robot consists of 12D Decoder chip, RF receiver, H Bridge IC, DC motors, Wheels, and other components including re-chargeable battery, etc are arranged over a chassis mechanism to move over the floor freely. To control the robotic vehicle based on the input information H-Bridge IC is connected at the output of 12D, and this IC is used to control the DC motors ultimately, which controls the robot moving mechanism. The description is as followed.
The RF signal transmitted by the transmitter is detected and received by this section. This binary encoder data is sent to the decoder for decoding the original data. The receiver receives an RF signal, converts the RF signal to an IF signal, and then converts the IF signal to a base band signal, which is then provided to the base band processor. As is also known, RF transceivers typically include sensitive components susceptible to noise and interference with one another and with external sources. The RF receiver is coupled to the antenna and includes a low noise amplifier, one or more intermediate frequency stages, a filtering stage, and a data recovery stage. The low noise amplifier receives an inbound RF signal via the antenna and amplifies it. The RF receiver used is RWS-434. This RF receiver receives RF signal, which is in the frequency of 434.92MHz and has a sensitivity of 3μV. The RWS-434 receiver operates from 4.5 to 5.5 volts DC, and has both linear and digital outputs. 12V DC motors are used for the vehicle movement. For this purpose, two motors with built in reduction gear mechanism DC motors are used and are rated for of 30 rpm those will be driven through L293D H-Bridge IC.
C. Weed Plucking Mechanism
This mechanism is constructed with 2 spur gears and both are equal to each other in dimensions and having similar teeth’s. One spur gear is directly coupled to the motor shaft and the motor used here operates at 12V DC. This motor is rated for 30 RPM such that gears will be revolved at normal speed. The other spur gear is meshed with motorized spur gear by which both gears will be rotated in clockwise. The idea of choosing this mechanism is to pluck the grass or weeds those encountered with this mechanism. Means as the vehicle is moving in the field, the tiny weeds existed on its way and are under the mechanism will be removed. Since it is a prototype module, the basic concept will be proven practically
D. Components Required
- 12E Encoder chip
- 12D Decoder chip
- L293D H-Bridge IC
- VOLTAGE REGULATOR
E. Weed Plucking Machine Applications
- Removes weed in farm
F. Advantages and Limitations
- Less time consumption in clearing all the weed.
- No labour is necessary.
- Manufacturing cost is low.
- Cannot use long time because it works on battery.
IV. RESULTS AND DISCUSSION
The demo module is constructed successfully and results are found to be satisfactory. Since it is a prototype module, the robot constructed here contains a tiny weed plucking mechanism and it moves in all directions according to the command signals passed by the remote unit. Agricultural technology refers to technology for the production of machines used on a farm to help with farming. Agricultural machines have been designed for practically every stage of the agricultural process. They include machines for tilling the soil, planting seeds, irrigating the land, cultivating crops, protecting them from pests and weeds, harvesting, threshing grain, and sorting the products. People who are trained to design agricultural machinery, equipment, and structures are known as agricultural engineers.
Conclusion
The research work is targeted to complete within the specified duration, almost the task is completed successfully and we have designed & developed one basic module of “Weed plucking Robot”. While designing and developing the prototype module lot of problems are faced, and a systematic step-by-step approach is followed to rectify the problems one after another. We have not given much importance for the mechanical design; therefore a simple chassis is constructed, and all electronic hardware including mechanical transmission section is mounted to this chassis. The weed plucking mechanism constructed with spur gears is arranged at bottom side of the moving mechanism and it is driven through dc motor. Using two more small DC motors are mounted at rear side and two small plastic wheels are coupled to the motor shafts directly. At front side free wheeling type wheel along with its bracket is mounted to the chassis. Here the remote has been constructed using four keys and a RF transmitter by which we will be able to control the movement of the robot.
References
[1] Haibo L, Qing L, Yufeng X, Chuijje Y, 2010. Research and development on the key technology of wheat single seed robot. IEEE World Automation Congress; September. pp: 339-343 [2] Haug S, Michaels A, Biber P, Ostermann J, 2014. Plant classification system for crop/weed discrimination without segementation. IEEE Winter Conf on Application of Computer Vision, March. pp: 1142-1149. [3] Chocron O, Delaleau E, Pleureau JL, 2007. Flatness based control of a mechatronic weed killer autonomous robot. IEEE Int Symp on Indust Electron; June. pp: 2214-2219. [4] Jeon HY, Tian LF, 2009. Direct application end effector for a precise weed control robot. Biosyst Eng 104: 458-464. [5] Chocron O, Delaleau E, Pleureau JL, 2007. Flatness based control of a mechatronic weed killer autonomous robot. IEEE Int Symp on Indust Electron; June. pp: 2214-2219. [6] Kladivko EJ, 2001. Tillage systems and soil ecology. Soil Till Res 61: 61-76. [7] Liu J, Li Z, Li P, Mao H, 2008. Design of a laser stem-cutting device for harvesting robot. IEEE Int Conf on Automation and Logistics; September. pp: 2370-2374. [8] Nakai S, Yamada Y, 2014. Development of a weed suppression robot for rice cultivation: weed suppression and posture control. Int J Electr Comput Electron Commun Eng 8: 1736-1740. [9] Parker C, Fryer JD, 1975. Weed control problems causing major reduction in world food supplies. FAO Plant Prot Bull 23: 83-95. [10] Mallikarjun1, Dr.Manjunath R2, Dr.Krishnamurthy N3 “Review on Brain Tumor Detection and Analysis Using MRI Multi Slice Sequences and further progress proposed” in International Journal of Multidisciplinary Educational Research(IJMER), with International Scientific Indexing Value: 2.286, Volume: 4, Issue: 10, October, 2015. [11] Mallikarjun Mudda1, Dr.Manjunath R2, Dr.Krishnamurthy N3 “Enhanced Image Registration Technique for Medical Image Segmentation” in International Medical Sciences Academy, Vol 30; No. 3 (July – September 2017) (SCI, Scopus Indexed). [12] Mallikarjun Mudda, Thangadurai N “RF Controlled Metal and Deleterious Gas Detecting ROVER” World Journal of Engineering research and Technology, 4 (1), 221-229, 2017. [13] Mallikarjun Mudda, Sruthi Bhargav N, “Application of System Engineering in Election Voting System International Journal of Engineering & Technology -UAE, 7(2.16) 102-106, issue 16, 2018(Scopus Indexed). [14] Mallikarjun Mudda, Vishwa Teja “Automatic Solar Grass Cutter”, International Journal for Research in Applied Science & Engineering Technology Volume 6, Issue IV, April 2018. [15] Mallikarjun Mudda, E Sandeep “Smart helmet and intelligent bike system using RF technology”, International Journal of Basic and Applied Research, P-ISSN 22493352, E-ISSN 22780505, 2018. [16] Mallikarjun Mudda, G.Prathyusha “Distance Analysis Using HC-SR04”, JETIR November 2018, Volume 5, Issue 11, 2018. [17] Mallikarjun Mudda, A Rakesh, K Gayathri, “HAPTIC ARM FOR PARALYSED PEOPLE” International Journal of Research and Analytical Reviews (IJRAR), Volume 6, Issue 1 March 2019. [18] Mallikarjun Mudda, G Prathyusha, A Akshay “CONTROLLING SPEED OF MAGLEV USING GAP ANALYSIS”, International Journal of Research and Analytical Reviews (IJRAR), Volume 6, Issue 1 March 2019. [19] Mallikarjun Mudda, Lavan Kumar “Assistance for Blind through Audio Command”, International Journal of Science and Research (IJSR) Volume 8 Issue 3, March 2019. [20] Mallikarjun Mudda, Thrived Kumar “RESERVATION BASED SMART PARKING SYSTEM”, International Journal of Research and Analytical Reviews, IJRAR March 2019, Volume 6, Issue 1. [21] Mallikarjun Mudda, G Sai Aishwarya “Voice-Assisted Blind Spot Detection for Vehicles with Accident Detection”, International Journal for Research in Applied Science & Engineering Technology (IJRASET), Volume 7 Issue IV, Apr 2019 [22] Sibghatullah k, Mallikarjun Mudda “Preliminary Detection of Lung Diseases in Pediatric Population: A Soft Computing Approach”, International Journal of Recent Technology and Engineering (IJRTE), ISSN 2277-3878, September 2019. (Scopus Indexed). [23] Mallikarjun Mudda, Syed Jahangir “Target Tracking System: PAN TILT”, International Journal of Engineering and Advanced Technology (IJEAT) ISSN: 2249-8958, Volume-8 Issue-5, June 2019. (Scopus Indexed). [24] Mallikarjun Mudda, Kotte Nived Maanyu, “Esole: Energy Harvesting using Piezoelectric Sensors” International Journal of Research and Analytical Reviews, E-ISSN 2348-1269, P- ISSN 2349-5138, Volume 7, Issue 1, February 2020. [25] Mallikarjun Mudda, Farheen “ARTIFICIAL NEURAL NETWORK BASED WEATHER PRIDICTION SYSTEM”, INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY RESEARCH VOLUME 9, ISSUE 02, ISSN 2277-8616, PP-5587-5594, FEBRUARY 2020. (Scopus Indexed) [26] Mallikarjun1, Dr.Manjunath R2, Dr.Krishnamurthy N3 “Brain Tumor Classification using Enhanced Statistical Texture Features”, IETE JOURNAL OF RESEARCH https://doi.org/10.1080/03772063.2020.177550 , PP-1-12, © 2020 IETE. (Web of science, SCI, Scopus Indexed) [27] Ambika M , Mallikarjun Mudda, “Melanoma skin cancer detection using image processing technology” International journal of creative research thoughts,page-1397-1401, ISSN: 2320-2882, volume 8, issue 7 july 2020. [28] Ambika M , Mallikarjun Mudda,, “Bone fracture detection using GLCM Feature Extraction” International journal of creative research thoughts, page-1370-1375, ISSN: 2320-2882, volume 8, issue 7 july 2020.
Copyright
Copyright © 2022 Mallikarjun Mudda, Sandeep Hemdribhotla, T. Krishna Chaitanya, T. Rahul. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40499
Publish Date : 2022-02-24
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online