

Ijraset Journal For Research in Applied Science and Engineering Technology
Wireless Remote Controlled Linear Actuator Lamp
Authors: Ravindra Awari, Shreyas Barudwale, Sneha Raundal
DOI Link: https://doi.org/10.22214/ijraset.2022.43421
Certificate: View Certificate
Abstract
A radio frequency (RF) signal refers to a wireless electromagnetic signal used as a form of communication if one is discussing wireless electronics. Radio waves are a form of electromagnetic radiation with identified radio frequencies that range from 3kHz to 300 GHz. Any electronic device is termed sophisticated, regarding the magnitude of human-device interface and thus enhancing the need to control any device to enable optimum utilization in any application. The ability to control any device needs the help of an intermediate device which acts as a medium between the human and device. This project’s goal is to create a lamp which can move upwards and downwards using linear actuator and can be controlled remotely. Atmega328p Microcontroller which is an open-source hardware and software that designs and manufactures single board microcontroller kits for building digital devices and interactive objects that can sense and control both physically and digitally.
Introduction
I. INTRODUCTION
We have been using Traditional Lamp setup at Ceremony beginnings, Exhibitions, Seminars and Cultural Programs. As a traditional way of beginning of some program or start of something new, it is considered auspicious to light a lamp before the start. This job has a considerable amount of risk factors, effect on environment, resource wastage. To list it properly, as the lamp holds fire, sometimes it can be risky if something catches fire or the lamp spills and burns the floor. Similarly, the smoke coming out of the lamp also causes pollution, and lastly to mention the wastage of oil that it contains, the cotton that is burnt for every new use. Keeping all this factors in account, we brought up an idea of making a Electronic Lamp having LED bulbs, linear actuator to make it compact, easier to carry and use only when needed. This electronic lamp is controlled remotely using the RF technology (Radio Frequency). Our aim is to make a lamp that has less risk factor, save time, operate remotely and requires less manual intervention.
II. PURPOSE OF THE STUDY
To Understand working of RF transmitter and receiver.
To understand the working of Actuator.
By applying knowledge of digital technique overcome traditional techniques.
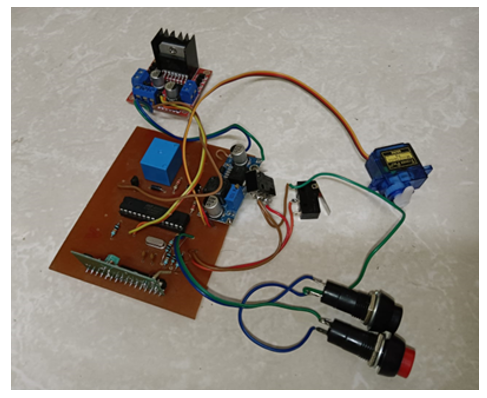
III. MATERIALS AND METHODS
Table 1 Specification of components
|
COMPONENTS |
SPECIFICATIONS |
|
1] RF Transmitter/Receiver |
The transmitter frequency range 433.92MHz. Low power consumption Distance Range Up to 20-100Meters |
|
2] Electronic Linear Actuator |
Stroke Length 500MM. A linear actuator converts this rotational motion into linear motion |
|
3] Atmega328p |
Program memory size: 32Kb (16K x 16) EEPROM size: 1K x 8. RAM size: 2K x 8 |
|
4] Motor Driver IC L293 |
Separate Input-logic supply, It can drive small DC-geared motors, bipolar stepper motor. |
A. Atmega328p Microcontroller
ATMEGA328 is used like any other controller. All there to do is programming. Controller simply executes the program provided by us at any instant. Without programming controller simply stays put without doing anything.
As said, first we need to program the controller and that is done by writing the appropriate program file in the ATMEGA328P FLASH memory. After dumping this program code, the controller executes this code and provides appropriate response.
The device operates between 1.8 and 5.5 volts. At 2V and 1MHz, typical supply current for an ATmega328 (or a 328P) is 0.3mA.
B. Electronic Linear Actuator
An actuator is a device that converts energy, which may be electric, hydraulic, pneumatic, etc., to mechanical in such a way that it can be controlled.
The quantity and the nature of input depend on the kind of energy to be converted and the function of the actuator. Electric and piezoelectric actuators, for instance, work on the input of electric current or voltage. A linear actuator is an actuator that creates motion in a straight line, in contrast to the circular motion of a conventional electric motor. Linear actuators are used in machine tools and industrial machinery, in computer peripherals such as disk drives and printers, in valves and dampers, and in many other places where linear motion is required.
Hydraulic or pneumatic cylinders inherently produce linear motion. Many other mechanisms are used to generate linear motion from a rotating motor.
This miniature Linear Actuator Stroke Length 500MM, 7mm/S, 1500N, 12V is an electric push rod and an ideal solution for industrial, agricultural machinery, construction, clean sweeping vehicles, vessels, cargo and many other applications.
The key to this linear actuator lies within the small DC gear motor that utilizes a screw-drive with gears that comes with the ability to offer considerable loads by unleashing electro mechanical motion.
The typical current draw is 30-40mA on 24 Vdc units and 15-20mA on 12 Vdc units when not in 'sleep mode.
C. Flap Motor
Here we are using sg90 servo motor for rotating the flap of the project. Micro Servo Motor SG90 is a tiny and lightweight server motor with high output power. Servo can rotate approximately 180 degrees (90 in each direction) and works just like the standard kinds but smaller. You can use any servo code, hardware, or library to control these servos.
To make this motor rotate, we have to power the motor with +5V using the Red and Brown wire and send PWM signals to the orange color wire. Hence, we need something that could generate PWM signals to make this motor work, this something could be anything like a 555 Timer or other Microcontroller platforms like Arduino, PIC, ARM or even a microprocessor like Raspberry Pie. Now for controlling the direction of motor, the PWM signal produced should have a frequency of 50Hz that is the PWM period should be 20ms.
Out of which the On-Time can vary from 1ms to 2ms. So when the on-time is 1ms the motor will be in 0° and when 1.5ms the motor will be 90°, similarly when it is 2ms it will be 180°. So, by varying the on-time from 1ms to 2ms the motor can be controlled from 0° to 180°.
D. Motor Driver IC L293
The L293D is a popular 16-Pin Motor Driver IC. As the name suggests it is mainly used to drive motors. A single L293D IC is capable of running two DC motors at the same time; also, the direction of these two motors can be controlled independently. So, if you have motors which has operating voltage less than 36V and operating current less than 600mA, which are to be controlled by digital circuits like Op-Amp, 555 timers, digital gates or even Microcontrollers like Arduino, PIC, ARM etc.
This IC will be the right choice for project. It works on the concept of H-bridge. H-bridge is a circuit which allows the voltage to be flown in either direction.
As you know voltage need to change its direction for being able to rotate the motor in clockwise or anticlockwise direction, Hence H-bridge IC are ideal for driving a DC motor. In a single L293D chip there are two h-Bridge circuit inside the IC which can rotate two dc motor independently. Due its size it is very much used in robotic application for controlling DC motors. Given below is the pin diagram of a L293D motor controller.
The L293 is designed to provide bidirectional drive currents of up to 1 A at voltages from 4.5 V to 36 V. The L293D is designed to provide bidirectional drive currents of up to 600-mA at voltages from 4.5 V to 36 V.
IV. RESULTS
Features of Proposed Results are:
- Remotely turning ON/OFF the Electronic Lamp
- Proposed System can be accessed by a particular frequency.
- Range of the system is 100 meters.
Conclusion
As a result, In our wireless remote controlled linear actuator lamp. Initially the flap opens for the lamp to rise.We can see the actuator moving upwards, then lamp glows while it’s in rest position and goes back downwards to its rest position controlled by wireless RF Transmitter and receiver.
References
[1] Aynul Hossain “Conceptual Design of a Low-Cost Linear Actuator for Variable span Wing Application” Volume 13, Issue 1/2021 Research Gate [2] T.Thai Mary Delsy “Wirelessly Control of Industrial Process Using RF Signal” Volume 10, Number 3(2015) International Journal of Applied Engineering Research. [3] Guna T *, Manoj kumar S, Hamsa Krishna R*, Nitesh S*, Ms. R. Gayathri * “Wireless communication using 433 Mhz transreceiver” ;03/Issue/:03/March-2021 International Research Journal of Modernisation in Engineering Technology and Science. [4] R Hari Sudhan, M Ganesh Kumar, A Udhaya Prakash, S Anu Roopa Devi, P Sathiya“Arduino Atmega 328 Microcontroller” Vol. 3, issue 4, April 2015 International Journal of Innovative Research in Electrical, Electronics, Instrumentation and Control Engineering. [5] Prithviraj R Shetti, Ashok G Mangave “DC motor speed control with feedback monitor based on C# application” Volume: 03 Issue: 03 | March-2014 IJRET: International Journal Of Research in Engineering and Technology. [6] Vikash Kumar, Rekha Jha “Four Quadrant Speed Control of DC Motor with the help of AT89S52 Microcontroller” Volume 01| Issue 08 | October 2015 Journal for Research.
Copyright
Copyright © 2022 Ravindra Awari, Shreyas Barudwale, Sneha Raundal. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43421
Publish Date : 2022-05-27
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online