

Ijraset Journal For Research in Applied Science and Engineering Technology
Women Safety Night Patrolling Robot
Authors: Abhilash Reddy Komatireddy, Kota Ramprasad Reddy, Bargav Boini, Dr. G. Ganesh Kumar
DOI Link: https://doi.org/10.22214/ijraset.2022.44043
Certificate: View Certificate
Abstract
Women\'s safety has become a major concern in all parts of the world as a result of growing violence against them. They have become accustomed to being physically or mentally mistreated. Harassment at work and in public places is causing individuals to abandon their passions and goals. Although the government has passed various anti-harassment legislation, the rate of female harassment has not decreased. Being amoral support is the best approach to reduce violence (robbery, sexual assault, domestic violence, and so on) against them. As a result, the Women Safety Patrolling Robot will endeavour to ensure the safety of women. Existing systems use CCTV cameras to record incidents, but this is not a preventative strategy for women\'s protection, whereas the suggested patrolling robot will patrol in its assigned area and check for anonymous behaviours. As a result, the women\'s community will benefit more from the night patrolling robot.
Introduction
I. INTRODUCTION
Robotics is the study of the Design, Development, Function, and Application of Robots. Robots may be used in various circumstances and for various purposes, but many are now used in hazardous environments and manufacturing processes. Since the world faces serious issues regarding women’s safety it is inevitable to constitute our work towards it.
The Women Safety Night Patrolling is an attempt to make use of the robots for enhancing Women’s safety. It will be a great step towards the rise of automation and Safety. Women safety night patrolling robot makes the best use of its features to work without any problem. It is primarily due to fear of violence against them or being physically or sexually abused. Even in the 21st century where technology is rapidly growing and new gadgets are being developed but still women and girls are facing problems. They often work across ethnic, religious, political, and cultural divides to promote liberty. We know that our society is all aware of the importance of women’s safety, but it is also the duty of individuals that they should be properly protected. Women’s robot patrolling system is the best way to reduce the probability of becoming a victim of violent crime is to recognize, defend and look up resources to help you in hazardous situations.
II. METHODOLOGY
If a woman is in dilemma or gets split from friends or family during an outing or someone is following with bad intentions or do not know how to find a way back home then this device with her will guard her and bring assistance when she needs it by giving her current location and health conditions to her associates and control centre through SMS and call. The idea behind this is to provide security to women. Any abnormal activity and small interaction of sound results in the alert of the concerned authority. Then robot automatically goes to the particular area and captures the image of that area and sends it to the user. It uses a predefined and dynamic line and dynamically generated lines to follow its path while patrolling. Rover stops at particular points and moves to the next points if the sound is detected or else the dynamic routing takes place. The system uses an Infrared (IR) based path following system for patrolling assigned areas. It monitors and sensors each area to detect any problem using a combination of two HD cameras. It can monitor and sensors sound on the premises.
III. REQUIREMENTS
A. Hardware
The hardware requirements are as follows –
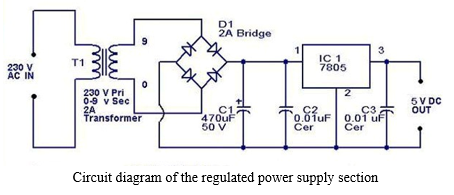
- Power Supply: The design of stabilized supplies has been simplified dramatically by the introduction of transformer ICs like the L78xx and L79xx - three-terminal series regulators which give very stable output and include current limiter and thermal protection functions. The regulated power supply consists of a transformer and a bridge rectifier which may be a combination of 4 diodes connected in a very bridge shape.
Bridge rectifier has the utmost efficiency and it's best than other rectifiers that’s why we prefer it. This rectifier converts ac into pulsating dc. After the rectifier filter circuit is utilized, usually a capacitor in parallel is employed as a filter or we can use several capacitors in parallel and therefore the number of inductors is unsynchronized. these filters are low pass filters as we required dc at the o/p. Then after capacitor transformer is employed for observing the pure dc o/p. we can use various voltage regulators for obtaining pure dc o/p but we prefer 78xx series voltage regulators as they're simpler, cheaper and easier than others
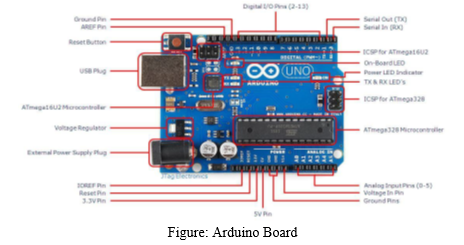
2. Arduino: The Arduino is a family of microcontroller boards to simplify electronic design, prototyping and experimenting for artists, hackers, and hobbyists. Arduinos (we use the standard Arduino Uno) are built around an ATmega microcontroller essentially a complete computer with CPU, RAM, Flash memory, and input/output pins, all on a single chip. The Arduino connects to your computer via USB, where you program it in a simple language (C/C++, similar to Java) from inside the free Arduino IDE by uploading your compiled code to the board. Once programmed, the Arduino can run with the USB link back to your computer, or stand-alone without it no keyboard or screen is needed, just power.
3. ESP32 Camera: The ESP32-CAM is a small size, low power consumption camera module supported by ESP32. It comes with an OV2640 camera and provides an onboard TF card slot. The ESP32-CAM are often widely employed in intelligent IoT applications like wireless video monitoring, WiFi image upload, QR identification, and so on. Open a browser and sort the ESP32-CAM IP address. Press the beginning Streaming button to start video streaming. ESP32-CAM is widely utilized in various IoT applications. it's suitable for home smart devices, industrial wireless control, wireless monitoring, QR wireless identification, wireless positioning system signals and other IoT applications.

L293D Driver
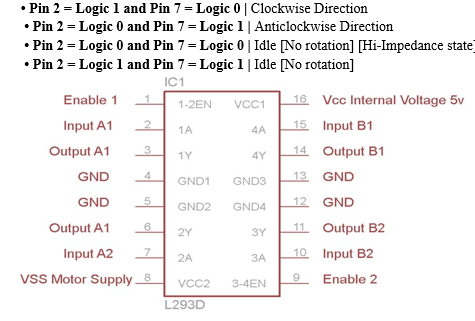
L293D Motor Driver Module is an expansion board or driver module of L293D. L293D IC is a dual half-bridge driver IC, therefore the module drives the motor in any direction and speed. it's compatible with any controllers and processors like Arduino, AVR, PIC, etc and with a straightforward interface. It makes it easy to form a project instead of using an IC.L293D is a typical Motor driver or Motor Driver IC which allows DC motor to drive in either direction. L293D may be a 16-pin IC which might control a collection of two DC motors simultaneously in any direction. It implies that you'll be able to control two motors with one L293D IC.
- Working: There are 4 input pins for l293d, pin 2,7 on the left and pin 15,10 on the right as shown on the pin diagram. Left input pins will regulate the rotation of the motor connected across the left side and right input for the motor on the right-hand side.
- Logic Table: Let’s consider a Motor connected on the left side output pins (pin 3,6).
- For rotating the motor in a clockwise direction the inpupins have to be provided with Logic 1 and Logic 0.
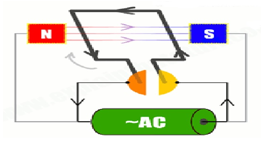
5. Motor: DC motors like this are great for battery-powered toys, but you don’t find them in many household appliances. Small appliances (things like coffee grinders or electric food blenders) tend to use what are called universal motors, which can be powered by either AC or DC. A universal motor has an electromagnet, instead of a permanent magnet, and it takes its power from the DC or AC power you feed in:
- When you feed in DC, the electromagnet works like a conventional permanent magnet and produces a magnetic field that’s always pointing in the same direction. The commutator reverses the coil current every time the coil flips over.
- When you feed in AC, however, the current flowing through the electromagnet and the current flowing through the coil both reverse, exactly in step, so the force on the coil is always in the same direction and the motor always spins either clockwise or counter clockwise, So it doesn’t matter what position the commutator is in at any given moment.
B. Software Requirements
- Arduino Software: The Arduino software is an open-source Integrated Development Environment (IDE). It includes a code editor, a message area, a text console, a toolbar with typical function buttons, and a series of menus.
IV. DESIGN AND IMPLEMENTATION
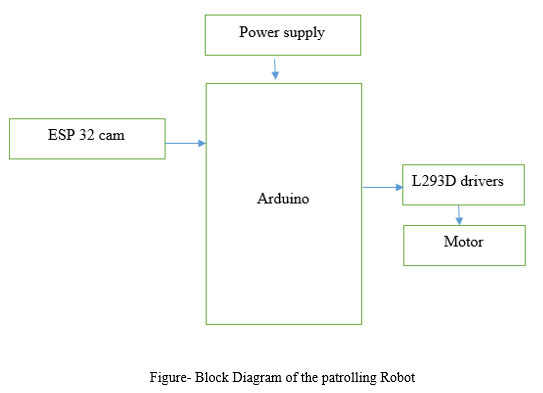
The construction of the women’s safety patrolling robot is done on a metal body. The L293D motor driver is mounted on the Arduino board and the ESP23 Camera is mounted on this metal body and attached to the Arduino board. The motors are attached to the rear part of the metal body and it’s wired to the L293D motor driver.
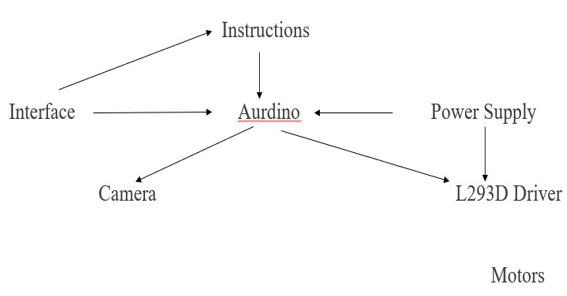
- Work-Flow
V. RESULT AND DISCUSSION
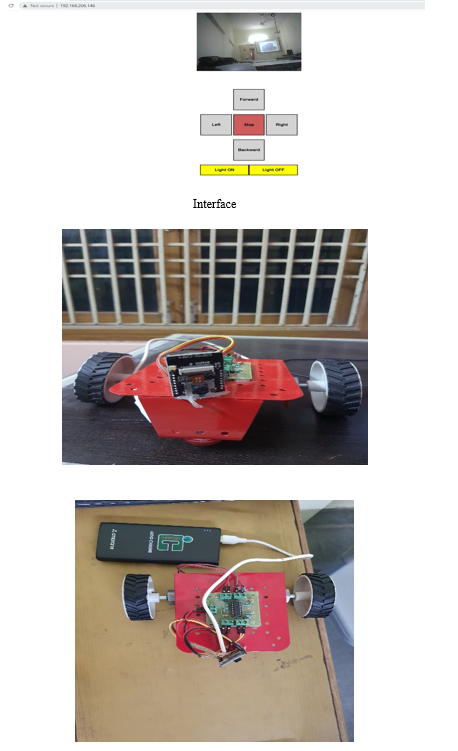
The below pictures are the photographs of the project. The first photograph is of the interface of this project from where this robot can be operated and observed. The second and third photographs are images of the patrolling robot.
 ???????
???????
References
. Ghanem Osman Elhaj Abdalla,: ‘Implementation of Spy Robot for A Surveillance System using internet protocol of Raspberry Pi’, published in 2017 International conference on recent trends in electronic information and communication technology. [2] Takato Saito and Yoji Kuroda: ‘Mobile robot localization using multiple observations based on place recognition and GPS’, published in IEEE International Conference on Robotics and Automation Road detection at night based on a planar reflection model in 2013. [3] Cheng Tang, Qunqun Xie, Guolai Jiang, Yong sheng Ou: ‘Road detection at night based on a planar reflection model’, published in IEEE International Conference on Information and Automation (ICIA) in 2013. [4] Kirk Mac Tavish, Michael Paton, and Timothy D. Barfoot: ‘Night Rider: Visual Odometry Using Headlights’ published in 14th Conference on Computer and Robot Vision in 2017. [5] Zhonghua Han and Tingting Li,: ‘ Research Sound Source Localization and Real-Time Facial Expression Recognition for Security Robot’, published in the journal of Physical Conference in 2020. [6] Jignesh Patroliya, Hard Mehta, and Hitesh Patel,: ‘Arduino controlled war field spy robot using night vision wireless camera and Android application’, published in Nirmala University International Conference on Engineering in 2015. [7] Aishwarya K and Baswaraj Gadgay,: ‘IOT Based Smart Multi-Application Surveillance Robot’, published in 2nd International Conference on Inventive Research in Computing Applications in 2015. [8] Dilliraj. E, Rekha.s, Sindu Priya. Vedhavalli. A,: ‘Rf controlled Warfield spy robot’, published in International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering; Volume 8, Issue 3. [9] Eun Som Join et al.,: ‘Human detection based on the generation of a background image by using a far-infrared light camera’, Sensors, vol.15,no.3. [10] Dushyant Kumar Singh, Dharmender Singh Kushwaha,: ‘Automatic intruder combat system: Away to smartboard surveillance, published in Defence Science Journal, vol.67,no1.
Copyright
Copyright © 2022 Abhilash Reddy Komatireddy, Kota Ramprasad Reddy, Bargav Boini, Dr. G. Ganesh Kumar. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44043
Publish Date : 2022-06-09
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online