

Ijraset Journal For Research in Applied Science and Engineering Technology
3-D Modelling of Self-balancing Stair Climbing Robot for Warehouse Management
Authors: Prasad Sanap, Rushikesh Satdive, Dr. (SMT.) Pulujkar Ashwinee Pravin
DOI Link: https://doi.org/10.22214/ijraset.2023.51931
Certificate: View Certificate
Abstract
Carrying luggage using carts and suitcases can be challenging, especially when climbing up and down stairs. Previous research has explored the use of crawlers and legs for mobile robots that can climb stairs, but these require complex systems and actuators. To address this, a power-assisted carrier cart with a Triple star wheel is proposed in this study to reduce the weight of carrying luggage. Previous research on mobile robots with stair-climbing capability has focused on crawlers and legs, which can be complex and require multiple actuators. To address the challenge of carrying luggage up and down stairs, a Triple star wheel-based power-assisted carrier cart is proposed in this study.
Introduction
I. INTRODUCTION
Although handcarts and travel bags are commonly used to transport goods, they can be difficult to manage on stairs due to their weight and bulkiness. To solve this problem, lighter carriers are needed for both flat surfaces and stairs. Luggage transportation often involves carts and bags, which can increase the load on steep stairs. Therefore, a lightweight carriage is necessary for both stairways and flat surfaces. Research on mobile robots with stair-climbing capabilities typ- ically involves leg and crawler techniques. However, leg-based movement is slow and requires complex control algorithms, making it unsuitable for carts and bags.
In order to overcome this drawback, some robots incorpo- rate a specialized wheel called the Triple Star Wheel, which has the ability to navigate both staircases and level ground with ease. The Triple star wheel consists of three rims that are arranged in a triangular configuration. This allows the wheel to rotate and climb stairs by rolling over the edge of each step. The aim of this research is to introduce a battery-powered carrier cart that incorporates the Triple Star Wheel device to alleviate the burden of carrying goods. The cart would be equipped with a motor and battery to provide additional power to the Triple star wheel, making it easier to navigate stairs and other obstacles. The power-assisted carrier cart would be especially useful for individuals who need to carry heavy luggage up and down stairs, such as travelers in airports or people living in multi-story buildings. By reducing the weight of the load and providing additional power to the Triple star wheel, the cart would make it much easier to transport heavy items without putting undue strain on the user. Overall, the proposed Triple star wheel-based battery-powered carrier cart has the chance to greatly optimize the efficiency and ease of carrying heavy loads up and down stairs, providing a practical solution for a common problem.
Why the Triple star Wheel? In order to create autonomous mobile machines capable of ascending stairs, research on mobile robots frequently uses techniques including legs and crawlers. Although the leg movement method may traverse a variety of terrains, it has a poor movement speed and necessitates a large number of actuators, intricate systems, and complex control algorithms. The leg movement strategy is ineffective since speed is a key aspect with carts and bags. Crawler propulsion can be controlled using less complex algorithms than leg propulsion. Short crawlers induce stair sliding because they often only make contact with stairs at corners. In order to climb stairs, one needs to use huge crawlers. As a result, crawlers are not recommended for use with carts.
To navigate obstacles, other robots employ a wheel known as a Tri-wheel . There have been studies done on the Tri-wheel for military vehicles travelling across difficult terrain . The driving wheel is fastened to the end of each of the three spokes that protrude from the centre shaft of this wheel. Through the use of planetary gears and a motor, the driving wheels are rotated. This wheel can be divided into two categories: those with two central axes and those with just one. The drive wheels’ rotation in relation to the spokes can be fixed or free, and there are driving and tumbling modes when using a double central axis.
The wheel system described in the article is a unique design that allows for versatile and efficient mobility in various terrains. It is capable of operating in two different modes: a driving mode and a tumbling mode. In the driving mode, the entire wheel, including the spokes, rotates, while in the rotational motion, only the spokes and powered wheels rotate. This mode is particularly useful for navigating stairs or steps that exceed the size of the wheels.
The central axis is always synchronized with the entire wheel’s rotation in the tumbling mode, ensuring a stable and smooth movement. The system’s design enables four sets of these wheels to be used to create a wheeled bot that maintains a stable posture that resembles that of a vehicle. The Triple star wheel’s simple structure, with a single central axis, makes it easy to manufacture, adding to its practicality and versatility. The unique design of the Triple star wheel system and its ability to operate efficiently in various modes and terrains make it a promising solution for enhancing mobility and accessibility in many applications, including robotics, transportation, and search and rescue operations.
II. LITERATURE REVIEW
The design suggests a novel wheelchair design that can climb stairs, which could enhance the quality of life for individuals with mobility impairments. The wheelchair com- prises an intelligent control system that employs sensors and algorithms to identify and traverse stairs. Moreover, it features wheels that can rotate and adapt to the stairs’ shape, facilitating smooth ascents and descents [1].
It presents a new shape-shifting robot that can climb stairs autonomously by adjusting its shape to match the dimensions of the stairs. The robot uses sensors and algorithms to de- tect stairs and calculate the optimal movements required for climbing. This demonstrate the robot’s ability to adapt to various stairs and suggest potential applications in hazardous environments and search and rescue operations [2].
The design presents a new wheelchair design that uses wheels and legs to climb stairs, controlled by an intelli- gent system with sensors and algorithms. This demonstrate the wheelchair’s ability to climb stairs smoothly and safely, suggesting potential benefits for individuals with mobility impairments [3].
The design describes a curved-spoke tri-wheel mechanism design that can climb stairs quickly and smoothly. The mech- anism uses three wheels with curved spokes that adjust to the shape of stairs and is controlled by a motor and an intelligent system with sensors and algorithms. This demonstrate the mechanism’s ability to climb stairs and suggest potential applications in improving mobility and accessibility for people with mobility impairments, as well as in emergency situations [4].
The design describes a pitch balancing control system for a flipping two-wheel robot that climbs stairs. The system adjusts the torque and angle to prevent instability and flipping. Ex- perimental results demonstrate the system’s effectiveness, and suggest the potential applications in hazardous environments and search and rescue operations [5].
III. DEVELOPMENT AND CONTROL
A. Principle of Operation
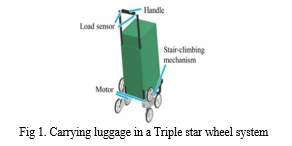
The recommended carrier cart is depicted in a diagram, featuring two Triple star wheels located on the lower half that propel the body in the same direction as the force detected by load sensors situated in the handle, providing assistance to the user. The cart moves on flat surfaces with the aid of four of its six drive wheels that are in contact with the ground. When a drive wheel encounters a step, the spokes rotate, constraining the movement of the driving wheel. As the user descends the stairs in the same direction as the central shaft, the spokes rotate around the bend of the staircase. The article further discusses the planetary gear stair-climbing mechanism, stair- climbing requirements, and power-assisted control.
B. Stair-climbing mechanism
Fig. 2 depicts the planetary gear-based stair-climbing appa- ratus. The system employs a planetary gear to connect the axes of the drive wheels, which rotate during planar motion, with the spoke axis, which rotates during stair climbing. If one of the driving wheels encounters a stair step and is impeded, it rotates around the other drive wheel. This mechanism allows for automatic switching between planar movement and stair climbing without requiring a step sensor or other similar equipment.

C. Conditions for climbing stairs
Following requirements must be met in order to construct a stair-climbing mechanism: (a) the dimensions requirement; and (b) the torque requirement. Below are the specifics of these:
- Dimensional Condition
Figure 3 illustrates how the carry- ing cart ascends steps. In terms of the staircase length, LS, and diameter, RW, of the powered wheels, the necessary distance, LC, is expressed as follows:
The carrier cart is designed with specific wheel size and spacing to enable it to climb stairs by turning the spokes. When the cart encounters a stair step, the spokes rotate, allowing the cart to ascend or descend the stairs while maintaining stability. This feature adds convenience and efficiency to the transportation of luggage, reducing the burden on the user.
2. Torque Condition
TA represents the torque required to move the spokes from axis, TB represents the torque required to rotate the spokes while the rotational axis is under load, TW represents the torque applied to the drive wheels to move the spokes, W represents the weight on the central shaft, and RS represents the distance of the spokes. The following condition needs to be met for the spoke to start rotating while the driving wheels are unable to rotate, and it is the balance between force and momentum:
As the cart descends the steps, it turns along the shape of the steps with a torque of TA.
D. Control With Power Assistance
Power-assisted control is a significant advantage of the Triple star wheel system, as it provides the operator with additional assistance when carrying heavy loads on both flat surfaces and stairs. When using the cart to transport luggage on flat surfaces, the weight is distributed across two wheels on each leg, which reduces the burden on each individual wheel and makes it easier to control the cart’s movement. Additionally, power assistance can be provided through the use of an electric motor or other mechanisms, which reduces the physical effort required by the operator and enhances the cart’s overall performance. On stairs, the Triple star wheel system enables the cart to climb and descend steps by rotating the spokes, which reduces the load on the operator and allows for smoother movement.
The power assistance feature can also be used to augment the cart’s performance on stairs, providing additional torque and control when ascending or descending steps. Overall, the Triple star wheel system is a versatile and practical solution for transporting luggage and other loads on a variety of terrains, offering both manual and power-assisted control options for improved efficiency and ease of use.
The Dimensions of the simulation model and details of the load sensor are discussed below.
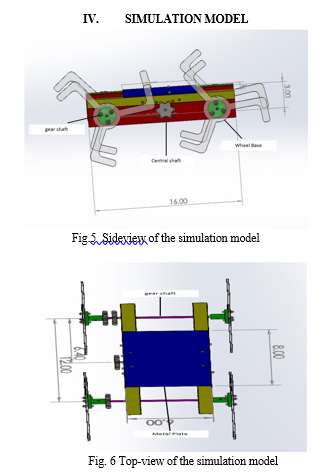
A. Dimensions Of The Stair Climbing Simulation Model
The dimension specifications of the stair-climbing simula- tion model are as follows:
- The distance between the two wheels, or the wheelbase length, is 12 inches on each side.
- The gap between the gear-shaft of each wheel and the central shaft is 6.4 inches.
- The overall length of the chassis is 16 inches, measured from end to end.
- The width of the chassis, not including the wheels, is 6 inches.
- An 8-inch long aluminum bracket is included to hold the luggage or payload on the system.
B. Load sensor
The load sensors in the cart play a crucial role in ensuring the stability and balance of the robot while ascending or descending stairs. They are strategically placed near the frame to accurately measure the weight of the payload being carried. If the weight exceeds the cart’s capacity, the load sensors can signal the system to alert the operator or adjust the power assistance to prevent potential accidents or damage to the robot.
Moreover, the load sensors also contribute to the robot’s self-balancing ability, an important factor in safe and effective stair-climbing. While ultrasonic sensors are commonly used for self-balancing, load sensors are more precise and efficient in detecting and compensating for weight imbalances. As the robot moves on the stairs, the load sensors continuously monitor the weight distribution and adjust the torque and speed of the wheels to maintain balance. Overall, the load sensors are an essential component of the Triple star wheel system, enabling safe and stable transportation of loads on both flat surfaces and stairs.
Conclusion
In this study, A cart with a Triple star wheel system was proposed for carrying loads up and down stairs. To achieve this, a stair-climbing device was developed, and the theoretical stair-climbing geometry was evaluated. To test the effectiveness of the prototype, we simulated it on flat surfaces and stairs. However, the movement was found to be unstable while descending stairs, indicating a lack of stability in the payload handling. Future work will focus on addressing this issue and evaluating the performance of the prototype when carrying luggage.
References
[1] J. Sun, ”A novel design of the intelligent stair-climbing wheelchair,” 2020 6th International Conference on Mechanical Engineering and Automation Science (ICMEAS), Moscow, Russia, 2020, pp. 217-221, doi: 10.1109/ICMEAS51739.2020.00047. [2] H. Wang, L. He, Q. Li, W. Zhang, D. Zhang and P. Xu, ”Research on a kind of leg-wheel stair-climbing wheelchair,” 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 2014, pp. 2101-2105, doi: 10.1109/ICMA.2014.6886028. [3] Y. Kim, J. Kim, H. S. Kim and T. Seo, ”Curved-Spoke Tri-Wheel Mechanism for Fast Stair-Climbing,” in IEEE Access, vol. 7, pp. 173766-173773, 2019, doi: 10.1109/ACCESS.2019.2956163. [4] C. W. Gamage and M. Parnichkun, ”Pitch Balancing Control of a Flipping Two-Wheel Stair Climbing Robot,” 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 2019, pp. 106-110, doi: 10.1109/ICA-SYMP.2019.8645994. [5] Han, Inhwan. (2008). Development of a stair-climbing robot using springs and planetary wheels. Proceedings of The Institution of Me- chanical Engineers Part C-journal of Mechanical Engineering Sci- ence - PROC INST MECH ENG C-J MECH E. 222. 1289-1296. 10.1243/09544062JMES1007. [6] Y. Yang, H. Qian, X. Wu, G. Xu and Y. Xu, ”A novel design of Triple star wheeled mobile robot for high obstacle climbing,” 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura- Algarve, Portugal, 2012, pp. 920-925, doi: 10.1109/IROS.2012.6385776. [7] L. M. Smith, R. D. Quinn, K. A. Johnson and W. R. Tuck, ”The Tri- Wheel: A novel wheel-leg mobility concept,” 2015 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 2015, pp. 4146-4152, doi: 10.1109/IROS.2015.7353963. [8] Maeda, Hiroshi Fujiwara, Shigeki Kitano, Hitoshi Yamashita, Hideki Fukunaga, Hideo. (2003). Control of an Omnidirectional Power-assisted Cart. Jsme International Journal Series C-mechanical Systems Machine Elements and Manufacturing - JSME INT J C. 46. 931-937. 10.1299/js- mec.46.931. [9] S. -Y. Chien, A. -S. Wang and C. -C. Wong, ”Design and Implementation of Two-Wheeled Self-Balancing Vehicle Based on Load Sensors,” 2020 International Conference on System Science and Engineering (ICSSE), Kagawa, Japan, 2020, pp. 1-4, doi: 10.1109/ICSSE50014.2020.9219320. [10] Li, J. Chang and L. Zhu, ”Research on autonomous stairs climbing for the shape-shifting robot,” 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), West Lafayette, IN, USA, 2015, pp. 1-6, doi: 10.1109/SSRR.2015.7442942.
Copyright
Copyright © 2023 Prasad Sanap, Rushikesh Satdive, Dr. (SMT.) Pulujkar Ashwinee Pravin . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET51931
Publish Date : 2023-05-10
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online