

Ijraset Journal For Research in Applied Science and Engineering Technology
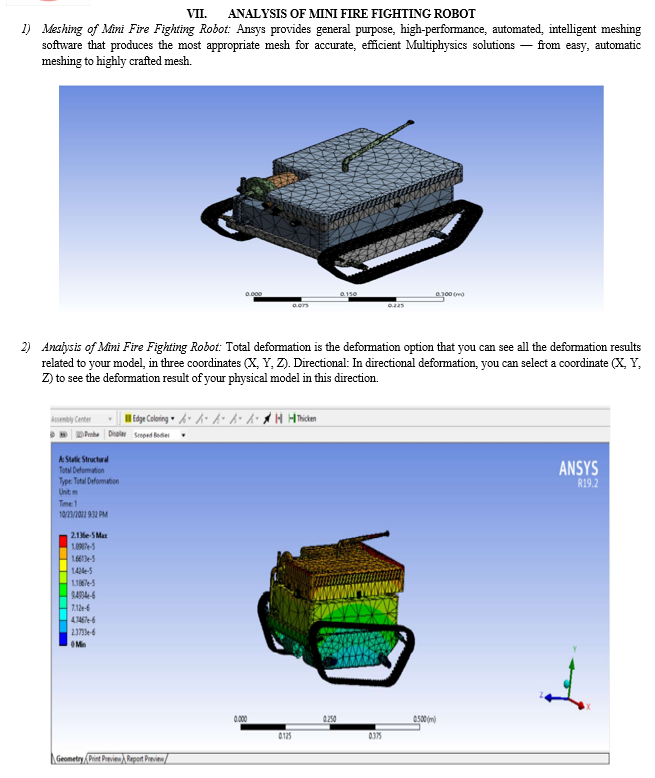
Design and Analysis of Mini Fire Fighting Robot
Authors: Priyanshu Singh, Ankit Solanki, Priyanshu Paras, Devendra Soni, Shreya Bhavsar, Suveer Dubey
DOI Link: https://doi.org/10.22214/ijraset.2022.47515
Certificate: View Certificate
Abstract
Fire Incident is a disaster that can potentially cause the loss of life, property damage and permanent disability to the affected victim. The Victim of Fire Incident can also suffer from prolonged psychological and trauma. Fire fighters are primarily tasked to handle fire incidents, but they are often exposed to higher risks when extinguishing fire, especially in hazardous environments such as in nuclear power plant, petroleum refineries and gas tanks. They are also faced with other difficulties, particularly if fire occurs in narrow and restricted places, as it is necessary to explore the ruins of buildings and obstacles to extinguish the fire and save the victim. With high barriers and risks in fire extinguishment operations, technological innovations can be utilized to assist firefighting. Therefore, this paper presents the design of a firefighting robot dubbed that can extinguish fire without the need for fire fighters to be exposed to unnecessary danger. It is designed to be compact in size than other conventional fire-fighting robot to ease small location entry for deeper reach of extinguishing fire in narrow space. It is also equipped with an ultrasonic sensor to avoid it from hitting any obstacle and surrounding objects, while a flame sensor is attached for fire detection. This resulted in It demonstrating capabilities of identifying fire locations automatically and ability to extinguish fire remotely at distance.
Introduction
I. INTRODUCTION
Firefighting is the act of extinguishing destructive fires. A firefighter must be able to stop fire quickly and safely extinguish the fire, preventing further damage and rescue victims to a safer location from the hazard. Technology has finally bridged the gap between Firefighting and machines allowing for a more efficient and effective method of firefighting. Robots were designed to find a fire before it rages out of control. The robots could one day work with fire fighters in reducing the risk of injury to victims. Our team was always more interested in security-related projects. We determined that our idea would be security-related, but we also wanted to create something unique, both in terms of the market and for a social cause. As a result, we devised the concept of a fire-fighting robot. One of the most crucial factors in a fire tragedy is the number of lives lost in the process of saving another's life. Because of explosive materials, smoke, and high temperatures, it is sometimes hard for firefighting workers to reach the scene of a fire. Many disastrous outcomes can be avoided if the fire is detected quickly. A single spark can start a huge conflagration. Because of an inadequate fire management system, not only industrial workers' lives are in danger, but also the lives of domestic workers. Many lives can be lost in a fire, and many more can be permanently injured. However, employing correct firefighting techniques, this can be prevented. We plan to construct a Fire Extinguishing Robot that can detect and move a little flame to extinguish it. With the use of flame sensors, it will automatically identify a fire. It navigates itself to the fire source and extinguishes the fire using the built-in fire extinguishing system once it recognizes the location of the fire breakout. It employs flame sensors for fire detection. When a fire is detected, the fire extinguishing system will be engaged. When the water pump detects a fire, it will begin ejecting water. The primary function of this system is to provide fire surveillance in order to prevent severe fire accidents and reduce human life loss. progress to location-dependent services and requests in wireless arrangements endures to need the progress of extra precise and reliable positioning and pursuing systems. The main and only work is to deploy the robot in a fire prone area and the robot will automatically work once it detects a fire breakout. This prototype helps in Rescue operations during fire accidents where the entry of service man is very difficult in the fire prone area. There are several existing types of vehicles for firefighting at home and extinguish forest fires. Our proposed robot is designed to be able to work on its own or be controlled remotely. By using such robots, fire identification and rescue activities can be done with higher security without placing fire fighters at high risk and dangerous conditions. In other words, robots can reduce the need for fire fighters to get into dangerous situations.
II. OBJECTIVE OF MINI FIRE FIGHTING
Nowadays, machinery and robotic design become important in helping human. This Fire Protection Robot was design to help people in any destructive burnt situation where this robot can extinguish burnt area immediately using autonomous system. The objective of the project will be to design a Fire Fighting Robot is to detect fire event, and use extinguish to fight the fire source. The goal of the fire-fighting robot project is to create a wheeled robot with capabilities to navigate through a specially designed maze, detect a candle flame (simulating a fire), extinguish the flame, and return to a designated location within the maze.
III. LITERATURE SURVEY
- Author Ratnesh Malik et al. has developed an approach towards firefighting robot. The robot is designed and constructed which is able to extinguish fire. The robot is fully autonomous. It implements the concept likes environmental sensing and awareness, proportional motor control. The robot processes information from its sensors and hardware elements. Ultraviolet, Infrared and visible light are used to detect the components of environment. The robot is capable of fighting tunnel fire, industry fire and military applications are designed and built. Ultraviolet sensors are used to detect fire. Once fire is detected, robot sounds an alarm. Then the robot activates an electronic valve which release sprinkles of water on the flame. Detailed concept of robot is explained which automatically detects fire and extinguishes it in short time by the use of sensors, microcontroller etc. This robot is used in places where human lives are at high risk.
- Author Kristi Kakashi et al. has developed intelligent firefighting tank robot. Tank robot is made from acrylic, plastic, aluminum and iron. Robot components are two servo motors, two DC motors, ultrasonic sensor, compass sensors, flame detector, thermal array sensor, white detector (IR and photo transistor), sound activation circuit and micro switch sensor. The objective is to search certain area, find and extinguish the flame for different flame positions, room configuration with disturbance. Robot is activated through DTMF transmitter and receiver.
- Control of an Autonomous Industrial Fire Fighting Mobile Robot is developed by H.P. Singh et al. The paper describes the construction and design of mobile firefighting robot. The system contains two optically isolated D.C. motors. Robot performs analog to digital conversion of the data provided by infrared sensors. Five infrared sensors are used. Two sensors control the motion of the robots and three are for flame detection. The extinguisher comprises of D.C water pump and a water container. The basic theme of the paper is to sense the flames of fire and extinguish it. For this infrared sensor is used as input sensor which senses the infrared rays coming out of the fire. The microcontroller controls the extinguishing system.
- Wireless firefighting robot is developed by Swati Deshmukh et al. It comprises of machine which has ability to detect fire and extinguish it. The firefighting robot can move in both forward and reverse direction and can turned in left and right directions. Thus, fire fighter can operate the robot over a long distance and there is no need for human near the area on fire. Light dependent resistors are used for detection of fire. These resistors are highly sensitive devices and can detect very small fire. The robot provides security at home, buildings, factory and laboratory. It is an intelligent multisensory based security system which contains firefighting system in daily life.
- Cell phone-controlled robot with fire detection sensors developed by Lashay Arora consist of mobile phone which controls a robot by making a call to the mobile phone which is attached to the robot. During the call activation period, if any button is pressed on the phone, the tone corresponding to the button pressed is heard at the other end of the call that is placed on the robot. The robot perceives Dual-Tone Multiple-Frequency (DTMF) tone with the help of phone mounted on the robot. The received code is processed by the microcontroller and then the robot performs actions accordingly. In the proposed system DTMF technology is used to position the shaft of motor at a required point with different sensors, each performing its own task. Rugged, Simple and cost-effective system is proposed here.
- Android Phone controlled Robot Using Bluetooth is developed by Arpit Sharma et al. Various techniques of Human Machine interaction using gestures are presented. Gestures are captured by using the accelerometer. The paper analyses the motion technology to capture gestures using an android smart phone which has inbuilt accelerometer and Bluetooth module to control kinetics of the robot. The microcontroller controls the signals of the Bluetooth module. Features like user friendly interface, lightweight and portability OS based smart phone has overtaken the sophistication of technologies like programmable glove, static cameras etc making them obsolete.
- ISSN(Online): 2319-8753 ISSN (Print): 2347-6710 International Journal of Innovative Research in Science, Engineering and Technology (An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 11, November 2015 Copyright to IJIRSET DOI:10.15680/IJIRSET.2015.0411051 10703 Author Saravanan has designed and developed an Integrated Semi-Autonomous Fire Fighting Mobile robot. The System controls four D.C. motors powered by Atmega2560 and controlled autonomously by navigation system. Navigation system comprises of integrated ultrasonic sensors and infrared sensors. The robot is fitted with wireless camera which captures the video and transmits it to the base station. The fire detection comprises of LDR and temperature sensor. If there is a fire the sensor detects it and the robot will be moved to the source and extinguishes it. The extinguishing system consists of a BLDC motor with water container. The SABOT can be operated manually for extreme conditions. It comprises of a GUI support through which robot can be controlled from the base station.
- Intelligent Fire Extinguisher System is developed by Poonam Sonale et al. The paper proposes of an adaptive fusion algorithm for fire detection. It uses a smoke sensor, flame sensor, temperature sensor for fire detection. It contains intelligent multisensory based security system m that contains a firefighting system in daily life. The security system can detect abnormal and dangerous situation and notify. Intelligent buildings are expected to be safer convenient and efficient living environments for society. The purpose of Intelligent Fire Extinguisher System is to extinguish flame in a certain amount of time. The system detects the fire location and extinguish fire by using sprinklers. As being Intelligent System, it cuts off the electricity of area where fire has been caught and starts the sprinklers only of that area.
IV. METHODOLOGY
The methodology is divided into two parts. The first part is on the designing of the robot followed by hardware description and the second part on the analysis of design. All parts were assembled, and experiments were then performed to determine the optimal distance of to extinguish the fire were carried out. Initially we need to make sure all the components are connected and give power supply through an external device the robot remains idle initially, later it starts rotating in 360 degrees to detect the presence of object with the help of flame sensor. If the object is not within the range, it moves ahead and then again checks the presence of object within the range. The signal is sensed to the one of the 5-channel flame sensor and then robot moves if it signals to center sensor so that we can move to the object accurately. After detecting the flame, it moves to certain distance and again checks the range of distance until it moves near the flame object. After it reaches it then in turn activates fire extinguisher or water pump to sprinkle the water on fire object.
V. COMPONENTS OF MINI FIRE FIGHTING ROBOT
IR Flame Sensor, HC-SR04 ultrasonic Sensor, Servo-Gear, Battery, Ejector, Mounting Plate, IR Sensor, Servo Motor, UV Sensor, Controller, Base, Motor, Module, Cover, Pump, Pump Support, Pipe, Support Shaft, Tank, Wheel, Tread Shaft, Wheel Shaft.
Conclusion
This project describes about the real time firefighting robot which moves in a constant speed, identify the fire, and then extinguish it with the help of pumping mechanism. It has advantageous features such as ability to detect location of fire automatically besides having a compact body and lightweight structure. The robot can be used at a place that has a small entrance or in small spaces because it has a compact structure. The system can potentially be useful to accompany fire fighters and prevent an outbreak. From the experimental results, the robot can sense smokes and fire accurately in a short time. Fire causes tremendous damage and loss of human life and property. It is sometimes impossible for the fire fighter personnel to access the sight of fire because of explosive materials, smoke and high temperature. Through this we can conclude that robot can be placed where human lives are at risk. The robot can operate in the environment which is out of human reach in very short time. In such environments, firefighting robots can be useful for extinguishing fire. These robots should be controlled remote operators who are located far away from the fire site using remote communication systems. The robot accurately and efficiently finds the fire within minimum time after the fire is detected. In future work Project aims to promote technology innovation to achieve a reliable and efficient outcome. Mobile robot that can move through a model structure, find fire and extinguish it. The movement of the robot is controlled by the sensors which are fixed on the mobile platform .is to provide security of home, laboratory, office, factory and building is important to human life. We develop an intelligent multisensory based security system that contains a firefighting system in our daily life. We design the fire detection system using sensors in the system, and program the fire detection and fighting procedure using sensor-based method.
References
[1] Jeelani, S., et al., Robotics and medicine: A scientific rainbow in hospital. Journal of Pharmacy & Bio allied Sciences, 2015. 7(Suppl 2): p. S381-S383. [2] Alif, M., S. Dota, and T. Akagi, Simple Trajectory Control Method of Robot Arm Using Flexible Pneumatic Cylinders. Journal of Robotics and Mechatronics, 2015. 27(6): p. 698-705. [3] Alif M, D.S., and Akagi T, Control and analysis of simple-structured robot arm using flexible pneumatic cylinders. International Journal of Advanced and Applied Sciences, 2017. 4(12): p. 151-157. [4] Alif, M., S. Dota, and T. Akagi, Control and analysis of robot arm using flexible pneumatic cylinder. Mechanical Engineering Journal, 2014. 1(5): p. DR0051-DR0051. [5] Kou L. So; “Automatic Fire Detection System Using Adaptive Fusion Algorithm for 11 October 2006, Pages: 966-971. [6] Scott Dearie; Kevin Fisher; Brian Rajala; Steven Wasson; “Design and Construction of a Fully Autonomous Fire Fighting Robot”, 2004 IEEE, Pages: 303-310. [7] Kashif Altaf; Aisha Akbar; Bilal Ijaz; “Design and Construction of an Autonomous Fire Fighting Robot”, 2007 IEEE [8] W. Budiharto, Membuat Robot Cerdas, Jakarta: Gramedia, 2006. [9] Ratnesh Malik, “Fire Fighting Robot: An Approach”, Indian Streams Research Journal Vol.2, Issue. I/March; 12pp.1-4 [10] Kristi Kosasih, E. Merry Sartika, M. Jimmy Hasugian, danMuliady, “The Intelligent Fire Fighting Tank Robot”, Electrical Engineering Journal Vol. 1, No. 1, October 2010 [11] H. P. Singh, Akanshu Mahajan, N. Sukavanam, VeenaBudhraja,” Control of an Autonomous Industrial Fire Fighting Mobile Robot”, DU Journal of Undergraduate Research and Innovation [12] Swati A. Deshmukh, Karishma A. Matte and Rashmi A. Pandhare, “Wireless Fire Fighting Robot”, International Journal for Research in Emerging Science and Technology [13] Lakshay Arora, Prof.AmolJoglekar, “Cell Phone Controlled Robot with Fire Detection Sensors”, (IJCSIT) International Journal of Computer Science and Information Technologies, Vol. 6 (3), 2015, 2954-2958 [14] Arpit Sharma, ReeteshVerma, Saurabh Gupta and Sukhee Kaur Bhatia, “Android Phone Controlled Robot Using Bluetooth”, International Journal of Electronic and Electrical Engineering.ISSN 0974-2174, Volume 7, Number 5 (2014), pp. 443-448 [15] Saravanan P, “Design and Development of Integrated Semi - Autonomous Fire Fighting Mobile Robot”, International Journal of Engineering Science and Innovative Technology (IJESIT)Volume 4, Issue 2, March 2015 [16] Poonam Sonale, Rutika Gawas, Siddhi Pisa, Anuj Kaldate, “Intelligent Fire Extinguisher System”, IOSR Journal of Computer Engineering (IOSR-JCE) e-ISSN: 2278-0661, p- ISSN: 2278-8727Volume 16, Issue 1, Ver. VIII (Feb. 2014), PP 59-61 www.iosrjournals.org [17] Phyo Wai Aung, Wut Yi Win, “Remote Controlled Fire Fighting Robot”, International Journal of Scientific Engineering and Technology Research Volume.03, IssueNo.24, September-2014
Copyright
Copyright © 2022 Priyanshu Singh, Ankit Solanki, Priyanshu Paras, Devendra Soni, Shreya Bhavsar, Suveer Dubey. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET47515
Publish Date : 2022-11-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online