

Ijraset Journal For Research in Applied Science and Engineering Technology
Design and Fabrication of Rehabilitation Instrument for Upper and Lower Limb
Authors: Ashish R. Borse, Hardik K. Bhoir, Nishant V. Gawad, Pritesh R. Jaiswal, Prof. Dipak J. Choudhari
DOI Link: https://doi.org/10.22214/ijraset.2022.42053
Certificate: View Certificate
Abstract
In today’s world, most of the people have a busy and hectic schedule. They hardly get time to look after their physical health which then affects them in their elderly age or in some cases at a young age. To take care of such physical problems rehabilitation is necessary. Rehabilitation improves and returns functional capacity and quality lifespan of people with physical injuries or disorders. Rehabilitation is not only used for treatment of physical diseases but also in sports industry. It helps in fast recovery of athletes and increases their performance on the field. Our project proposes a design of a rehabilitation instrument for upper and lower limbs. The upper limb rehabilitation instrument is designed for our shoulders and arm. It is designed to provide natural shoulder and arm movements in all directions possible. The lower limb rehabilitation instrument focuses mostly on knee and ankle joints and the EMS (Electro –Muscle Stimulator) is used to send external electric signals to the inactive muscles (muscles which have lost contact with the brain). The external electric signals sent are similar to the signals sent by brain to muscles. These signals help in contraction and expansion of muscles and thus, help in movement of that part of the body. The Rehabilitation instrument we are developing would be user-friendly, compact and budget friendly.
Introduction
I. INTRODUCTION
Rehabilitation is the process of curing by providing training and treatment to a person. All the different techniques of rehabilitation provide a unique purpose in the treatment which varies from person to person. But the main goal is to provide healthy life and active lifestyle to the patient. As the population has increased, the number of people with physical disabilities has increased and has been increasing steadily in recent years and because of the hectic lifestyle lead by people these days, they are prone to various ailments. These physical ailments are mainly found in the upper and lower limbs. These disorders can be treated but the cost of their treatment is high, which cannot be afforded by the middle class. Also, these therapies require rehabilitation that requires staff nurses to look after the patient. In such a hectic life, it is impossible for a family member to look after a patient.
II. OBJECTIVE
The objective of our project is to design and fabricate a low cost, user friendly and compact rehabilitation instrument. This instrument must be useful for upper and lower limbs.
III. LITERATURE REVIEW
A. Previous work
As the population ageing problem is increasing, elderly diseases and non-functioning of physical parts caused by age can quickly cause to dyskinesias, necessitating the care and nursing of a huge number of rehabilitation nursing personnel. This is a type of care for the relatives of patients. This is a huge weight. However, number of persons suffering from lower limb abnormalities due to stroke has steadily climbed in recent years. As a result of the mentioned situation above, research has come to a solution of an automation that could help in rehabilitation for stroke diseases and lower limb disorders and also for old people with physical function degeneration. Lower-limb rehabilitation robots of different types have been created over the period of last ten years to restore movement to the damaged limbs. They can be classified on the basis of principle they employ for rehabilitation, such as Treadmill trainers, Footplate type trainers, Overground trainers and stationary trainers.
The count of younger patients has been increasing rapidly with non-functioning of upper limb caused due to the strokes. The poor lifestyles and poor environment factors have accelerated this disorder. Limb movement disorder is caused due to a disease called hemiplegia after the occurrence of stroke. It not only reduces the life of the patient but also give him/her high pain to their physiology and psychology. Good exercises can enhance the nerve functioning of the patient. Electric Muscle Stimulation also known as EMS is a method which has been widely used in rehabilitation medicine and sports for many years. This method improves muscle tonus and completely restores it, but it is also used to treat medical conditions that cause loss in muscle mass.
B. Literature Summary
After going through various research papers and articles, it was noticed that the rehabilitation instruments available in today’s market can only be used for one body part, either upper limb or lower limb. This project overcomes this gap, as it is a combinational rehabilitation instrument for both upper and lower limbs. Also, this project is way too much cheaper than the instruments available in the market.
IV. METHODOLOGY

B. Material Specification
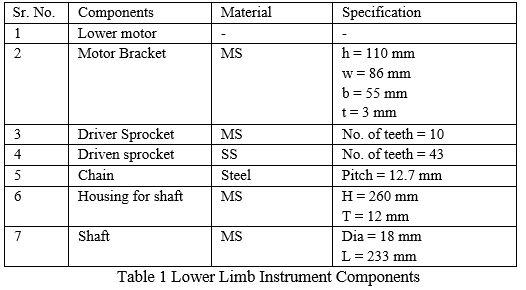
1. Lower Limb Instrument Specification
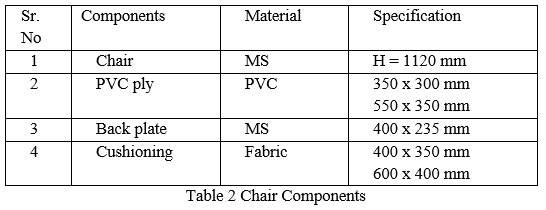
a. Chair
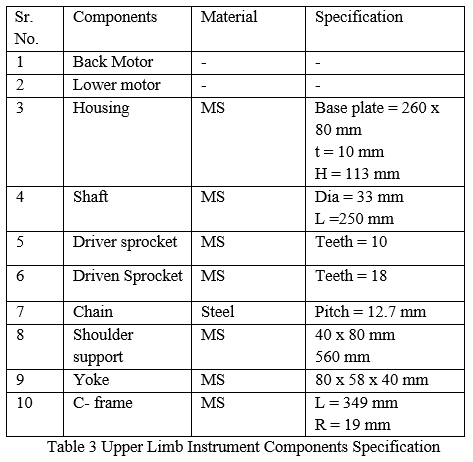
b. Upper limb rehabilitation Instrument Specification
C. Manufacturing of components
- Lower Limb rehabilitation
a. Chain and Sprocket: A profiled wheel with teeth that mesh with a chain is known as sprocket, chain wheel or sprocket- wheel. They are used in bicycles, vehicles, motorcycles and other machinery to transmit motion between two shafts. it was manufactured by Milling process.
b. Bracket: Bracket is used to hold the motors. They are made of MS plate of 3mm thickness bent at 90°. 3 holes are made to mount the motor to the bracket and two capsules holes to mount the bracket to the base plate or plywood.
c. Shaft and Housing: This shaft is for holding the leg sprocket. The shaft provides free rotation on the housing. It is for holding the shaft at a certain height from the base ply. So that complete rotation of pedals takes place without touching the ground.
d. Bearing: Bearing are used to support the shaft which rotates inside the housing. It reduces friction of the shaft.

2. Upper Limb Rehabilitation
a. Back Housing: It is used for holding the shaft at a certain distance from the back plate mounted on back of the chair. The height of housing is kept according to sprocket dimensions.
b. Shaft: It provides free rotation of the sprocket that is mounted on the shaft.
c. Back Bracket: This component is used for holding the back motor.
d. Pipe for hand: A rectangular hollow pipe is used for holding hand & motor at elbow point. The shoulder motor rotates the pipe vertically upward and downward.
e. Yoke: Yoke is welded at the end of hollow rectangular pipe at the elbow area. It provides inward and outward rotation of elbow.
f. C-Frame: A bent MS rod is used to provide support from elbow to wrist while rehabilitation.
g. DC Wiper Motor: The motor is used for driving the mechanism.
h. Battery: A DC battery of rating 12 Volts and 32 Amperes is used as power supply for the project.
V. CONSTRUCTION
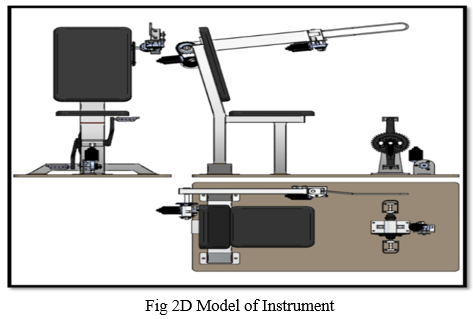
The project is divided into three parts
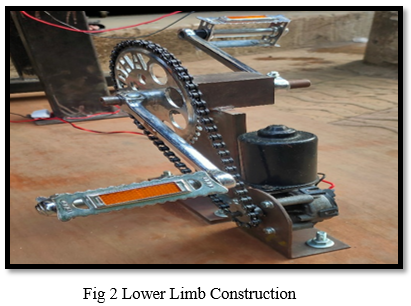
A. Lower limb Rehabilitation Instrument
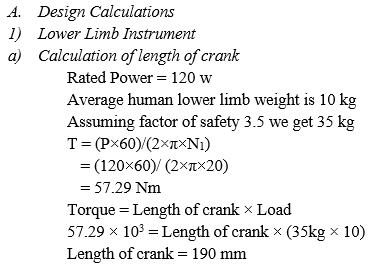
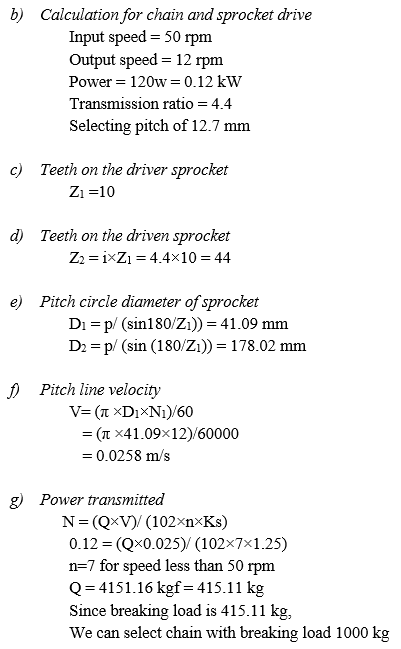
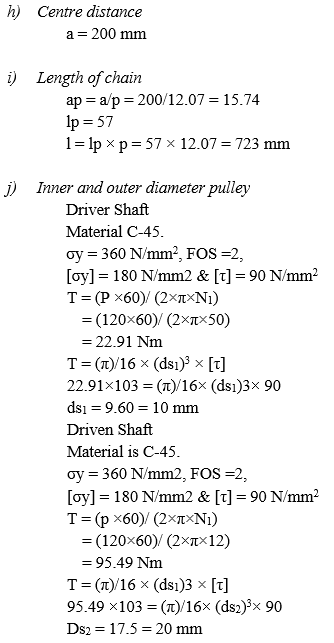
The lower limb rehabilitation instrument consists of motorized chain and sprocket mechanism. The motor is fixed to the platform with the help of a bracket. The shaft is placed inside the housing which is fixed to the platform. The small Sprocket of 10 teeth is connected to the motor shaft which rotates the bigger Sprocket of 43 teeth. The reduction ratio is 4.3. The shaft at bigger Sprocket has crank and pedal on which user or patient keeps his feet during rehabilitation.
B. Chair
The chair is design according to standard chair dimension. Rectangular pipe of cross section 50mm x 100 mm is used for the construction of chair. The total height of chair is 1120 mm. The height of bottom seat from surface is 450 mm. The angular base is provided for uniform distribution of user weight. The chair is made up of Mild steel material.

C. Upper limb rehabilitation instrument
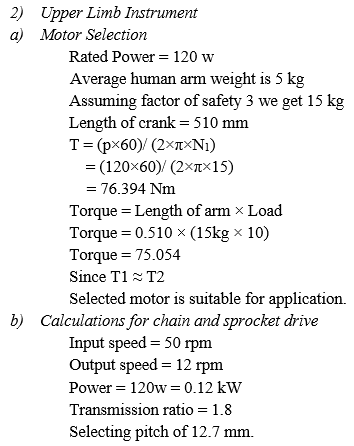
Shoulder mechanism consist of motorized chain and sprocket arrangement. The shaft is placed inside the housing which is mounted on the back plate on the back of the chair. The motor is fixed with the chair with the help of bracket. The small Sprocket of 10 teeth is connected to motor shaft which is connected to the bigger Sprocket of 18 teeth. The reduction ratio is 1.8. The rectangular pipe is connected at the end of bigger Sprocket shaft for the rotation of shoulder.

Elbow mechanism consists of yoke mechanism. One of the parts of yoke is fixed and welded to rectangular pipe while the other part is movable. A pin is provided for the locking of yoke mechanism. The motor is mounted on Elbow mechanism with the help of bracket. The motor shaft is placed inside the yoke which gives rotates the movable part of the yoke. A C-frame is welded to yoke for supporting the user’s hand.
VI. WORKING

The working of instrument as follow
A. Lower Limb Rehabilitation Instrument
The user or patient keeps his feet on the pedal during rehabilitation. The motor starts rotating small Sprocket which rotates the bigger Sprocket shaft through chain mechanism. Due to 4.3 reduction ratio the output at shaft gives low rpm generally around 12 rpm.
B. Upper Limb Rehabilitation Instrument
The user’s hand is attached to the rectangular pipe. The motor rotates the small Sprocket, which rotate the bigger Sprocket through chain arrangement. Due to reduction ratio of 1.8 reduction ratio the output shaft rotates at low rpm. The pipe is connected to the end of shaft, which gives he flexion of shoulder around 135 to 140 °. The motor drives the yoke mechanism which gives the inward rotation of 90 to 110* at lower speed generally around 10-15 rpm
VII. TESTING AND RESULTS
As per the requirements of physiotherapist’s requirements, we needed our instrument to perform 3 motions, 2 for upper limbs and 1 for lower limb. One of our team member, was made to sit on chair with his left and tide to the rectangular pipe and C frame with the help of straps, to avoid slippage during testing. We performed shoulder flexion and extension and then inward and outward rotation of elbow at different speeds. Then, cycling motion was tested for lower limbs. After several tests, we can conclude that our project was able to provide the following motion at variable speeds: -
- Cycling motion for lower limbs.
- Shoulder flexion and extension.
- Inward and outward rotation of elbow.
VIII. FUTURE SCOPE
The seat can be made adjustable so that it will be useful for patients of different heights
- The distance between the lower limb rehabilitation instrument and chair can be made adjustable.
- The upper limb rehabilitation instrument can be made for both limbs.
- More degrees of freedom in instrument can be added for better rehabilitation.
Conclusion
In this project, we have developed a rehabilitation instrument which could be used by physiotherapists for medical therapy of paralyzed patients. This device provides 3 motions, one for the legs and two for the hand. Our project being a combinational rehabilitation instrument is too cheap as compared to the ones present in the current market.
References
[1] Xun Lian. “Structure design and kinematics analysis and stimuation of exercise bike type lower limb rehabilitation instrument” (2021) [2] Rakto Pavlovic, Drena Trkulja-Petkovic and Stanislav Dragutinovic. “Electro-Muscle Stimulation -The Application in Practice” (2016) [3] Zaixiang Pang, Tongyu Wang, Zhanli Wang, Junzhi Yu, Zhongbo Sun & Shuai Liu. “Design and Analysis of a Wearable Upper Limb Rehabilitation Robot with Characteristics of Tension Mechanism” (2020) [4] Fuhai Zhang, Legeng Lin, Lei Yang & Yili Fu. “Design of an Active and Passive Control System of Hand Exoskeleton for Rehabilitation” (2019) [5] Darwin G. Caldwell and N. G. Tsagarakis. “Design, Control & Testing of Soft Exoskeletons for Upper and Lower Body Rehabilitation” (2007) [6] Design, Control & Testing of Soft Exoskeletons for Upper and Lower Body Rehabilitation. “Design of an Exoskeleton Mechanism for the Shoulder Joint” (2014) [7] B. Birch, E. Haslam, I. Heerah, N. Dechev & E. J. Park. “Design of a Continuous Passive & Active Motion Device for Hand Rehabilitation” (2018) [8] Diaz I, Gil JJ, Sanchez E “Lower-limb robotic rehabilitation: literature review and challenges. J” (2011)
Copyright
Copyright © 2022 Ashish R. Borse, Hardik K. Bhoir, Nishant V. Gawad, Pritesh R. Jaiswal, Prof. Dipak J. Choudhari. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET42053
Publish Date : 2022-04-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online