

Ijraset Journal For Research in Applied Science and Engineering Technology
Electric Go-Kart
Authors: Mr. A. Kuppuswamy, M. Govindharajen, S. Nithish Nandha, M. Manojh, P. Sanjai
DOI Link: https://doi.org/10.22214/ijraset.2023.53084
Certificate: View Certificate
Abstract
: This project presents the design and analysis of an electric motor-powered Go-kart. The main aim of this project is to reduce the usage of organic fuel powered vehicles and to design a vehicle which works efficiently in the emerging electric vehicle sector. In order to maintain the speed levels of the Go-kart, seamless decision was made in motor selection. Alternate materials have been applied in the Go- kart to reduce both static and dynamic forces in pursuance of improving the efficiency and performance of the Go-kart. The main focus of the frame design was on the stability of the Go-kart and safety of the driver. The MS light weight steel has been employed for the frame to reduce the overall weight. To check the feasibility of the frame design, finite element analysis has been done. The results obtained showed that the frame design was safe under maximal impact load conditions. Motor, the heart of the electric vehicle was selected and installed in such a way that it can perform well for an extended run time. BLDC motor was selected in this case. Speed control of the kart was done using a Motor controller. The kart is provided with a chain drive to achieve maximum efficiency in transmission of power from the motor to the wheels. Hydraulic disc brakes were provided for smooth and effective braking under both dry and wet conditions. Design calculations were carried out and optimum results were obtained.
Introduction
I. INTRODUCTION
The Electric Go Kart is a system design to create a small-scale unit of transportation without an internal combustion engine. This system is intended to create an efficient and fun experience for those who use this product. The Electric Go kart is designed using DC-Brushless motors that use a 60V battery. The general definition of any Go-kart, a vehicle without suspension and differential it is a vehicle specially designed for a flat track race. a large range of engine karts were on track since the mid of the 20th century. Electric go-karts are low maintenance, requiring only that the lead acid batteries of the karts to be plugged into an array of chargers after each run. Since they are pollution- free and emit no smoke, the racetracks can be indoors in controlled environments. Most fully charged electric karts powered by lead-acid batteries can run a maximum of 30 minutes before performance is affected. The current automotive scenario encourages eco-friendly vehicles to attenuate the damage done by the emissions. an efficient alternative for the engine is that the motor.
Electric go-karts do not have fuel tanks or other flammable materials which can prove to be safer in case of an accident. Motor replaces the engine and hence the kart gets dramatically changed in both design and performance. The vehicle hence runs only on electricity and is designed to satisfy the mandatory requirements for karting. The design of the frame indicates that it is an open kart with a straight chassis. The frame acts as a suspension in karts. It must also be rigid to not break under extreme load conditions. Hence, flexibility should be compromised with stiffness. The first objective is to design a stable and safest vehicle for the driver. Every subsystem is designed supported the first objective then integrated into a final blueprint. Finite Element Analysis is applied on the frame model in cases of front, side and rear impact based on the result obtained from the above tests the design is modified accordingly. The center of gravity is kept as low as possible to get maximum stability. The length of the vehicle is shortened so as to reduce the weight of the vehicle.
The wheelbase and track width of the vehicle are chosen accordingly. The front track width is minimized to reduce the turning radius of the vehicle and to increase the efficiency. Motor, the heart of the electric vehicle was selected and installed in such a way that it can perform well for an extended run time. BLDC motor was selected in this case. Speed control of the kart was done using a Motor controller.
The kart is provided with a chain drive to achieve maximum efficiency in transmission of power from the motor to the wheels. Hydraulic disc brakes were provided for smooth and effective braking under both dry and wet conditions. Design calculations were carried out and optimum results were obtained. An extensive market survey was also done on frame material, brakes, motor, transmission system for cost and availability. International standards were followed throughout the design process.
II. FLOW CHART FOR ELECTRIC GO-KART

The flow chart is showing the working principle of Electric Go-Kart.
- 230 Volt AC supply was given to the circuit then this supply was connected to the charge control circuit. Charge control circuit contains rectifier, filter circuit, overvoltage protection circuit and regulator circuit.
- Then this output of the charge control circuit was connected to the input of the sealed lead acid battery.
- Then the output of the sealed lead acid battery is connected to the motor control circuit. This motor control circuit contains the acceleration command, brake command, forward/reverse and regenerative braking control circuit.
- Then the output of the motor control circuit connected to the Brushless DC motor (BLDC) through the Acceleration command and brake command block.
- Then this Brush Less DC motor (BLDC) directly connected to the forward/reverse control through the motor control circuit.
III. BLOCK DIAGRAM OF ELECTRIC GO- KART
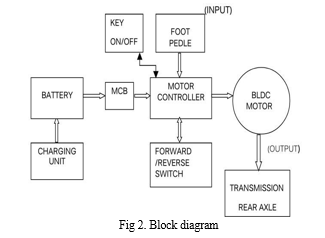
First, we have to connect the battery with charging unit. The battery was connected to the Miniature Circuit Breaker (MCB) for the protection of the battery from over voltage and short circuit.
Then the output of Miniature Circuit Breaker (MCB) was directly connected to the motor circuit. This motor controller contains IGBT and Micro controller combination circuit.
Also, this motor controller controls the acceleration and forward/reverse operation of the Brushless DC motor. Foot pedal also connected in this motor controller.
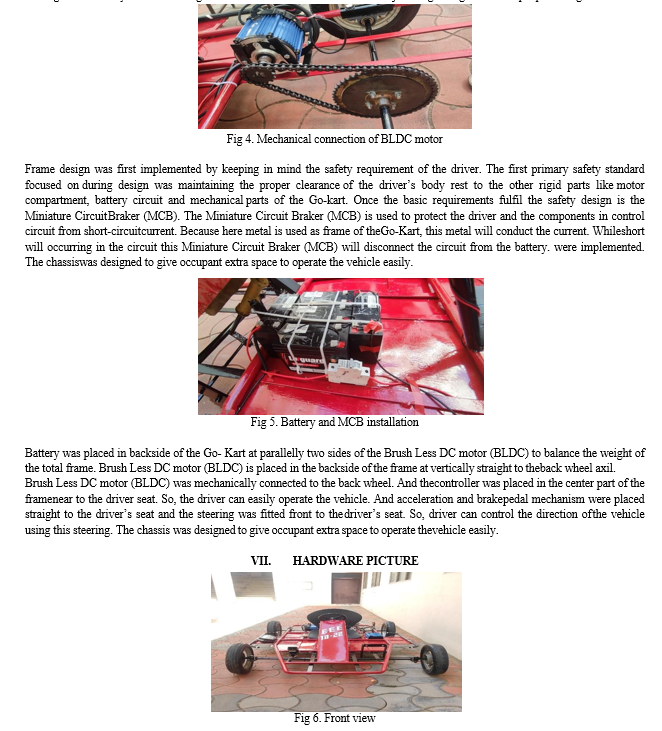
This motor controller is directly connected to the brushless DC motor and this brushless DC motor was mechanically connected to the rear axle transmission.
IV. CIRCUIT DIAGRAM OF A CONTROL CIRCUIT
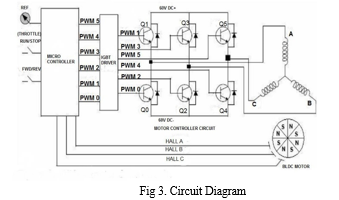
Power circuit of BLDC motor is consist of six power semiconductor switching devices connected in bridge configuration across a dc supply. Feedback diodes are connected across the device. The armature winding is assumed to be star connected. The control circuit consists of a commutation logic unit (controller for electronic commutator) which gets the information about the rotor shaft position and decides which switching devices are to be turned on and which devices are to be turned off. This provides six output signals out of which three are used as the base drive for the upper leg devices. The other three output signal are logically ANDed with the high frequency pulses (PWM) and the resultant signals are used to drive the lower leg devices. The switching sequence of the motor control circuit are 1, 6-1, 2-3, 2-3, 4-5, 4-5,6-…. This is for one specific direction of rotation (i.e) clockwise.5, 6-5, 4-3, 4-3, 2-1, 2-1, 6-…. This mode of operation is called 120- degree mode of operation. This is for counter clockwise direction.
V. WORKING PRINCILE
Supply from the battery was connected to the motor control circuit. in this circuit has microcontroller and IGBT combinational circuit. Also, this circuit contains regenerative braking control circuit.
Acceleration command and brake command was connected to the controller circuit. Hall sensor was connected to the Brushless DC motor (BLDC). Output of the hall sensor was connected to the controller circuit.
While the Go-Kart was switched on the hall sensor will detect the magnetic position in the Brushless DC motor (BLDC) and the signal was given to the controller circuit.
Controller circuit will correct the motor’s rotor magnet position. While acceleration command was given to the circuit supply was flows through the motor by IGBT combinational circuit.
Then the motor will rotate the wheel by chain coupled mechanism. Forward and reverse command will be controlled by the controller circuit and also regenerative braking was controlled by controller circuit.
VI. HARDWARE INSTALLATION
This project, the frame to be strong because Go-Kart would need to carry at least 150 kg safely to account for one passenger. Here mild steel is used in frame work. The size of frame is 7.33 X 4 ft. because of mild steel usage the weight of the frame is 15 kg. Uprights for steering and mounting other components could be welded to the main structure.
Picture of the frame on top of the frame there needed to be a platform for sitting on. It would be clear, allowing for a view of the components under, and also be structural enough to allow for direct mounting of seats and other parts. The dimension of the Go-Kart is designed as it freely run in the racing track. This Go-Kart also wanted it to be just long enough to fit one people sitting.

Conclusion
Manufacturing of electric go kart is done successfully, according to planned schedule. According to calculations, it is able to sustain weight and speed achieved around 30-35 kmph. It was successfully built without compromising in its strength or other components quality. The biggest obstacle to the widespread adoption of electric- powered transportation is cost related, as gasoline and the vehicles that run on it are readily available, convenient, and less costly. As is demonstrated in our timeline, we hope that over the course of the next decade technological advancements and policy changes will help ease the transition from traditional fuel-powered vehicles. Additionally, the realization and success of this industry relies heavily on the global population, and it is our hope that through mass marketing and environmental education programs people will feel incentivized and empowered to drive an electric-powered vehicle.
References
[1] C.Cardaso, J Ferreira, V.Alves“ The design and implementation of an electric go-kart” International Symposium on Power Electronics, Electrical Drives, Automation and Motion, 2006. SPEEDAM 2006, IEEE 05 July 2006 ISSN:1-4244-0193-3, Page 111-118. [2] Govardhana Reddy, Md. Hameed, “design report of a go kart vehicle”, International Journal of Engineering Applied Sciences and Technology, 2016,Vol. 1, Issue 9, ISSN No. 2455-2143 , Pages 95-102, Published Online IEEE July – August 2016. [3] Asfan Mohiuddin, Mohd Sayeed, Md Nawaz “Steering System of Electric Go-Kart” International Journal for Research in Applied Science & Engineering Technology (IJRASET) Volume 5 Issue I, IEEE January 2017, IC Value: 45.98 ISSN: 2321-9653,Page 453-456. [4] Sayed Nashit, Sufiyan Adhikari, Shaikh Farhan, Srivastava Avinash and Amruta Gambhire, ‘Design, Fabrication and Testing of Regenerative Braking Test Rig for BLDC Motor’, (2016). [5] C. Jagadeesh Vikram, D. Mohan Kumar, Dr. P. Naveen Chandra, ‘Fabrication of Regenerative Braking System’, International Journal of Pure and Applied Mathematics Volume 119, (2018). [6] A. Eswaran, S Ajith, V Karthikeyan, P Kavin, S Loganandh, ‘Design and Fabrication of Regenerative Braking System’, International Journal of Advance Research and Innovative Ideas in Education-Vol-4 Issue-3 (2018).
Copyright
Copyright © 2023 Mr. A. Kuppuswamy, M. Govindharajen, S. Nithish Nandha, M. Manojh, P. Sanjai. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET53084
Publish Date : 2023-05-26
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online