

Ijraset Journal For Research in Applied Science and Engineering Technology
Implementation of Flex Sensor based Prosthetic Hand
Authors: Prof. Amit Narote , Shaikh Noor Alam, Shaikh Faizan Azad , Manjeet Kagada
DOI Link: https://doi.org/10.22214/ijraset.2022.41541
Certificate: View Certificate
Abstract
Amputees face a variety of physical and emotional challenges. Because they have lost organs, they have to rely on others to carry out their daily activities. Amputees may now live more independently and freely thanks to prosthetics. As a result, the study\'s objective is to develop a Prosthetic Hand with a real-time flex sensor to assist them. To govern arm movements, the suggested design asks for the use of flex sensors in a glove controller. The findings are backed up by real-time oscillations of phantom mimicry, a unique trait of the human hand. Each of the five fingers may be moved individually thanks to its unique design. A nRF24 transceiver was used to establish a wireless communication link between the controller and the sensor. The main purpose of the project is to demonstrate how 3-D printing technology can be utilised to construct a low-cost, user-friendly prosthetic hand that allows amputees to do tasks that need both hands. By restoring the functionality of the wounded physical component, it assists the disabled in gaining the confidence to live an independent life.
Introduction
I. INTRODUCTION
According to a recent survey done in India, there are around 0.62 amputees per thousand people, as illustrated in Figure 1. The loss of a body component or a limb is referred to as amputation. Amputations can be caused by diseases such blood vessel disease, diabetes, cancer, and so forth, as well as traumas or accidents. Even though the amputees are physically capable, society will treat them differently, making them feel alone. They are primarily reliant on others to accomplish their everyday tasks, so prosthetics were created to help them live more independently.
Figure 2 shows the amputation rate by age group, and we can see that the bulk of amputations occur in the elderly. When compared to high-income countries, India's amputation rate for those over 60 years is lower since they are less afflicted by vascular problems and diseases like cancer.
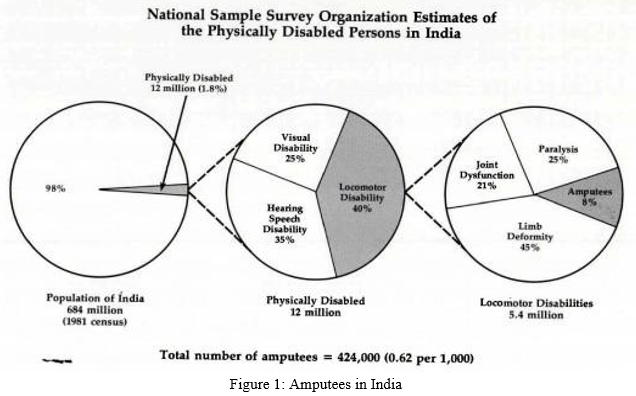
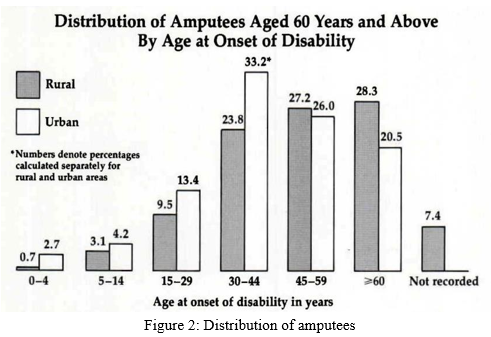
Figure 3 depicts the first prosthetic hand, the prosthetic hook hand, which was produced during the Civil War. Various types of prosthetic arms with various control techniques, such as Electromyography (EMG) sensors, Electroencephalogram (EEG) sensors, and so on, are now being developed and sold on the global market. Obtaining the signals and processing the input signals in the above-mentioned control approaches is a time-consuming procedure, and obtaining precise output is a difficult undertaking. The prosthetics on the market that use the above-mentioned control systems are expensive and out of reach for most people.
As a result, the research suggests an electronically controlled prosthetic to compensate for the loss and perform the same functions as the original limb. It would also eliminate reliance on others. A microprocessor directs the actions that the 3D printed prosthetic arms will do. The suggested work makes use of flex sensors to obtain the movement of the fingers created by the human hand, which is then supplied to the microcontroller to duplicate the hand's working, allowing the prosthetic arm to execute the same operation as the human hand. The prosthetic hand has servo motors to make finger movements and a gyroscope to control wrist movements, allowing it to act as an artificial hand. The amputee would be able to grab objects and hoist large goods without the assistance of others if this was used.
The system described above would be able to emulate human hand functions and be dexterous with natural control. The most crucial factor to consider is the price, which should be as low as feasible and accessible to all.
II. LITERATURE SURVEY
There are several prosthetic hand designs available all around the world. Some prosthetic hands may be identified by the sensors they use, the materials they're made of, and the technique they use. These prosthetic hands are more expensive and more difficult to use since the design and operation are so complicated. Below are a few publications that demonstrate how similar or unlike our work is to theirs.
- “On the use of 3D printing technology towards the development of a low cost robotic prosthetic arm”: The proposed method for replicating human hand movement in this study includes two methods: one employs a flex sensor incorporated into a glove to monitor finger movement, and the other uses an electromyography (EMG) sensor linked to the amputee's muscles. The biggest problem is that detecting and processing an EMG signal is quite challenging.
- “Prosthetic hand with Biomimetic Tactile sensing and force feedback”: According to this study, the motors that control the movement of the fingers would be controlled by a force feedback actuation system. The feedback actuation mechanism is housed within the residual limb's myoelectric band, and the sensor is made using a biomimetic approach. A 3D printed structure is merged with a surface. The disadvantage is that it only has linear properties, making it difficult to work with non-linear movements.
- “Thumb controlled Low-Cost Prosthetic Robotic Arm”: The circuit is held together by a particle board frame in this work's suggested technology. As a result, the prosthetic hand could become more bulky. The prosthetic arm also has a claw-like shape, which defies our goal of making it look exactly like a real arm so amputees may wear it easily.
- “Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides”: The proposed approach in this research makes use of optical waveguides, which are quite expensive. The optoelectronic strain sensors utilised here are subject to environmental disturbance. The use of a solenoid valve demands a continual control signal, which is difficult to provide.
- “Three-Dimensional Printing of Prosthetic Hands for Children”: This study primarily discusses 3D printing technology and materials utilised in the development of prosthetic hands. Growing up involves a lot of physical changes in children, which can be tough to adjust to. To help children adapt to these changes, a 3D printed prosthetic hand was made specifically for them. As a result, 3D printing technology may be used to design and create prosthetic hands faster, as well as provide greater quality, creative design, and customization options.
- “Design and Fabrication of a Soft Robotic Hand with Embedded Actuators and Sensors”: The suggested technology makes use of a soft silicone rubber material for the arm's body, which restores its shape once pressure is removed. The finger motions are detected using a piezoelectric transducer. The fabrication process is time-consuming. The movement is provided by an embedded shape memory alloy (SMA) actuator, which is built of Ni-Ti strip. Because NiTi strips are so sensitive, they pick up misleading signals.
- “Use of accelerometers in the control of practical prosthetic arm”: Accelerometers are used to regulate the movement of the prosthetic arm and to provide information on the orientation of limb segments in the suggested approach. A mixture of accelerometers, gyroscopes, and magnetometers is employed in the Inertial Measurement Unit (IMU). Muscle contractions are detected using an EMG sensor. The fundamental issue, however, is that the manufactured prosthetic limb is extremely heavy, slow to operate, and difficult to use.
- “Voice control based prosthetic human arm”: The suggested technology in this study includes a prosthetic arm that can be operated by speech. This is a significant stride forward in technology, but it comes with its own set of drawbacks. Because the prosthetic arm is operated by speech, it poses issues in a loud setting. The prosthetic arm may have a delayed reaction as compared to the glove-controlled prosthetic arm. The main issue is that, because it uses Google's API to transform voice instructions to text, it requires a continual internet connection.
- “Design of multi grip patterns, prosthetic hand with single actuator”: The suggested technology in this study uses only one actuator to operate a prosthetic hand with a five-finger multi-grip pattern that aids in daily tasks. However, the actuator is somewhat large. The fingers do not have a secure grip.
- “User friendly LabVIEW GUI for prosthetic hand control using Emotive EEG headset”: The prosthetic hand is controlled using a Brain Computer Interface in this article (BCI). The emotional Electroencephalograph (EEG) headset is used to record the signals. EEG is created in LabVIEW and coupled with a Graphical User Interface (GUI). It has a number of drawbacks, including a limited range of tasks, the need to teach it to execute the essential functions, and data disruptions caused by artefacts.
- “A Prosthetic hand control interface using ESP8266 Wi-Fi module and android application”: To set the angle of rotation, logic functions are built in the suggested project. The finger motions are determined by servo motors, which are controlled by a Wi-Fi module. The prosthetic limb is controlled via an Android application, and the system is manually controlled using the mobile control framework. The proposed solution use an Android application to select gestures. The disadvantage is that it can only be used at certain angles and that the complete machine needs to be connected to a Wi-Fi network
- “Data for benchmarking low-cost, 3D printed prosthetic hands”: The grip, finite element modelling, and tensile test on ABS and PLA materials are discussed in this study (3D printing). The hold of fingers on spherical, cylindrical, and cubic items is compared between human and artificial hands. A finite element model is a technique for analysing how prosthetic fingers interact with items. The mechanical characteristics of 3D printing materials such as ABS and PLA were tested by applying load. The suggested study has the problem of being confined to simply performing three activities and failing to analyse the arm's functionality.
- “Design of a robotic hand using Flex sensor”: For rotation, servo motors are employed in the proposed work, resulting in consistent pulse width modulations (PWM). The motion of the finger is sensed using flex sensors, and the bend of the finger is analysed using an ATmega8 microprocessor. The waveform is obtained using a four-channel oscilloscope. Serial communication connects the servo driver with the servo module. Current is delivered by a power transistor in an emitter follower. The downside is that high-repeatability, accuracy, and reliability sensors should be utilised
- “A method for 3D printing patient specific prosthetic arm with high accuracy shape and size”: The planned study involves obtaining tomographic pictures with CAD software and designing a prosthetic arm. The damaged and unaffected arms are compared using Blender software, and functions are performed appropriately. The problem is that replicating the working hand is tough and necessitates a lot of material deposition.
- “Gesture controlled prosthetic arm with sensation sensors”: The input signal in the suggested article comes from flex sensors in the glove. Servo motors are employed as actuators for finger movement, while Peltier plates are used to provide cooling. The temperature of the environment is measured using the LM35. The downsides are that it has fewer degrees of freedom and requires a very small amount of grip power to retain items.
III. METHODOLOGY AND WORK FLOW
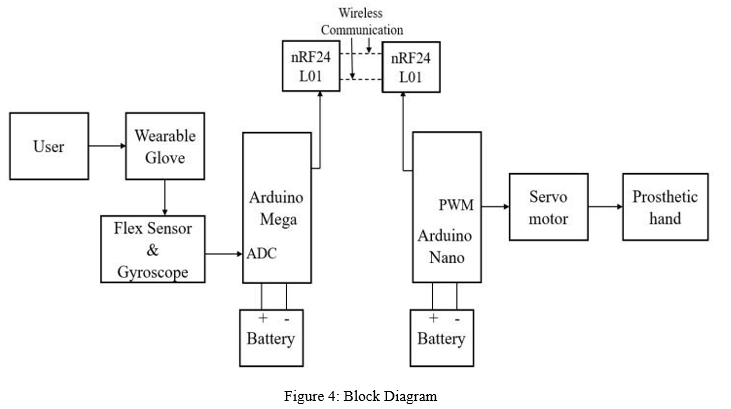
The idea offers a wearable glove controller for controlling the prosthetic arm's motions. The glove and the prosthetic arm are the two primary components of the prototype. To create a wireless communication link between the glove controller and the prosthetic arm, two nRF24L01 wireless transceiver modules are employed.
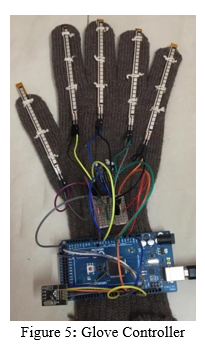
A. Glove Controller
The glove controller utilised in the experiment is shown in Figure 5. This controller is a type of wearable Human Machine Interface (HMI), in which the machine (prosthetic arm) responds to control signals from the user via a glove controller. As shown in Figure 5, the glove controller contains five flex sensors inserted in each finger, which collect information about the finger positions. Flex sensors are used to measure the change in resistance caused by bending or deflection, which is read as voltage in a voltage divider. At the wrist, a gyroscope module measures angular fluctuations and simulates them in the prosthetic arm. In the glove controller, an Arduino Mega microcontroller interprets data from the flex sensors via the Analog to Digital Converter (ADC) pin and provides the digital output to the Arduino Nano with the help of nRF24L01 wireless communication module to get the output at the prosthetic hand.
B. Prosthetic Hand
The 3-D printed Prosthetic Hand created in project is shown in Figure 6. The Arduino Mega's digital data is transformed into a Pulse width Modulation (PWM) signal. These signals then serve as a reference for guiding the servomotors' rotation accordingly.
Six servo motors are used, five for finger movements and one for wrist motion. The wrist movement is limited to a 45-degree angle. To function as artificial tendons in the fingers, KK77 strings were utilised to link the fingers to the servos. With the supplied input data and the servo pulleys, synchronised movement of each finger is achieved. The microcontroller utilised for processing in the prosthetic arm is the Arduino mini board.

The prosthetic arm's components were 3-D printed. CAD software was used to sketch up the hand design.
The flowcharts in figures 7 and 8 are used to programme the microcontroller.
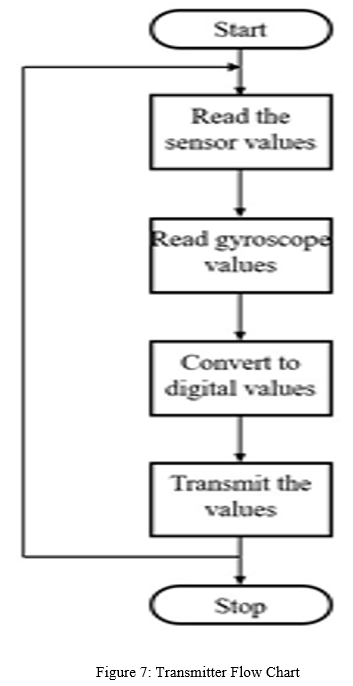
Figure 7 depicts the work flow or flow chart of the transmitter, or glove controller, as it relates to how the glove's input signals are conveyed to the receiver, which is the prosthetic arm. The motions of the prosthetic arm are controlled by the input signals from the glove controller.
As shown in figure 7, the variable flex sensors output is detected according to the action or movement in the glove and the output acquired is transformed into matching voltage values using the voltage divider circuit setup.
The x, y, and z axis alignments from the five flex sensors, as well as the gyroscope's output, are translated into digital numbers. The nRF24 transceiver module is then used to send these digital values.
The sensors' output is continually and uninterruptedly relayed. The output varies depending on how the glove is used, which affects the output of the flex sensors and gyroscope. When power is lost, the process comes to a halt.
The sensors' output is continually and uninterruptedly relayed. The output varies depending on how the glove is used, which affects the output of the flex sensors and gyroscope. The process comes to an end when power is lost.
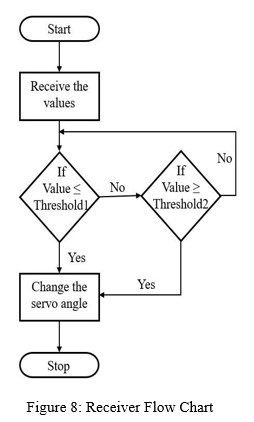
In terms of how the output signals from the transmitter or glove controller are received and processed to acquire the required actions, Figure 8 depicts the work flow of the receiver, or in other words, the prosthetic hand.
The Arduino must first be powered up before the rest of the process can begin. PWM waves are generated as a result of the digital output. Based on the digital readings of the flex sensors at two extremities, two threshold values, Threshold 1 and Threshold 2, were chosen. The servo motors are aligned properly when the digital values vary between the Threshold 1 and Threshold 2 values, as shown in the flow chart. The gyroscope's output controls the prosthetic hand's wrist motion; the wrist's angle of rotation is limited to 45 degrees. Until the output values acquired are modified, the prosthetic arm stays in the same position. Because of its fluid motions, the prosthetic hand gained the capacity to position itself according to the form of the item in acts where grasping of certain objects is necessary.
IV. RESULT AND DISCUSSION
The flexing and rotating motions of a typical human hand were studied in depth, and a prosthetic arm was conceived and produced utilising 3-D printing technology as a result. For motion control of the prosthetic arm, a glove controller with flex sensors and a gyroscope was created and set up in line with the prosthetic arm motions.
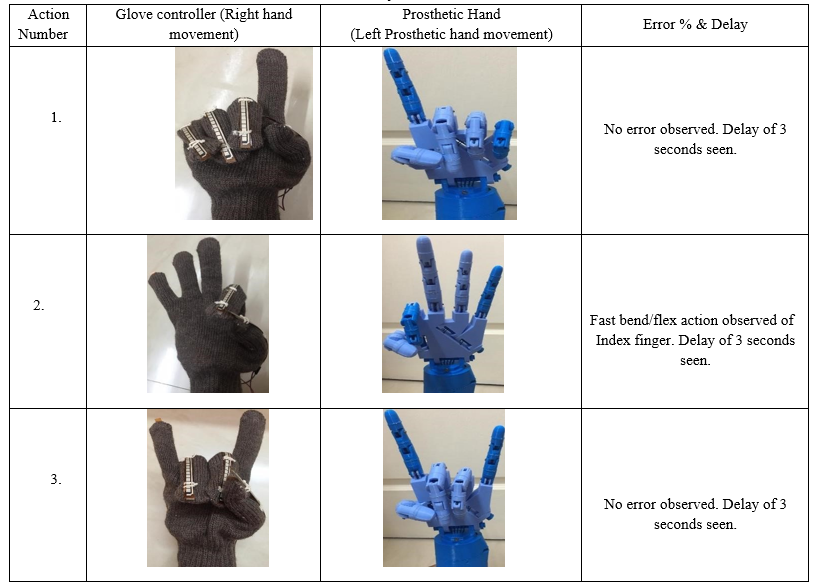
Different actions and motions of the produced prosthetic arm were performed in order to determine the functioning of the prosthetic arm, as shown in Table I. With only a few guarantees, different motions of the prosthetic arm might be captured. There was a delay at the output end due to the usage of nRF24L01 wireless transceiver modules for input signal transfer from glove to prosthetic arm. similar recorded in table 1.
Let’s take a detailed look at Table I,
In action 1, we can observe that the glove controller's index finger, which is worn on the right hand, is the only pointing finger, with the rest of the fingers in a closed grasp. The output received was desirable since it was a perfect reproduction of the controller's provided input, however it took 3 seconds to obtain the result.
The index finger of the glove controller has been totally flexed together with the thumb finger in action 2 (ok sign), whereas the remaining fingers have no flex action. Despite the fact that we could witness a quick bend/flexing of the index finger, the result was wanted since it was an identical reproduction of the supplied input from the controller with a 3 second delay in obtaining the output.
The middle and ring fingers of the glove controller have been entirely flexed in action 3 (Yo sign), while the rest of the finger has been left open or not flexed. The smooth flexing movement of the middle and ring fingers was observed, and the final output was synchronised to the input signal.
The output was obtained after another 3 second delay.
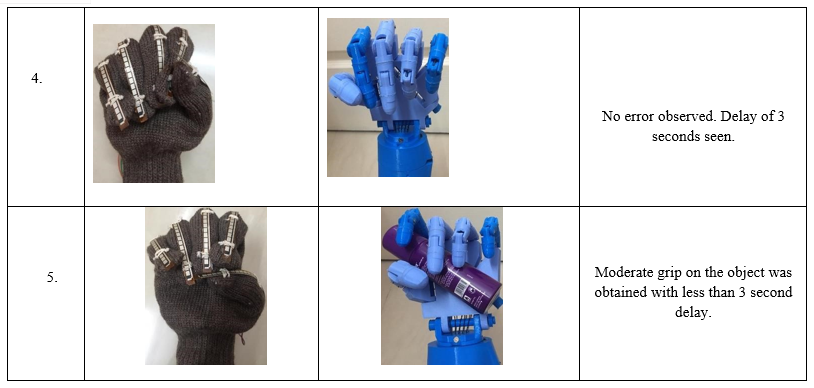
In action 4 (closed fist), all of the fingers have been flexed and a tight grasp can be seen in the glove controller; the prosthetic arm has a similar action, a closed grip with a significant tight grip. This activity had an almost 3-second delay.
Action 5 was performed to test the gripping capabilities of the arm; the glove controller had a closed grasp with mild finger pressure in order to avoid mayhem with the item. The prosthetic arm was able to grasp the thing by matching its fingers to the contour of the object in the photograph and establishing a strong grip on the object. The output was delayed by 3 seconds.
The foregoing delays were decreased to the maximum using baud rate control, and later study revealed that it may be lowered even further with the use of high-end transceiver modules to almost 0.5 seconds.
The connecting wire adjustment, which is currently under progress, can also help with the quick flexing of the index finger. With specific delays, desirable outputs might be obtained.
Table I- Few different actions obtained in prosthetic arm governed by the glove controller and corresponding error in allignment and delay observed.
Conclusion
The concept offers a mechanically active and multifunctional 3-D printed prosthetic arm that physically and functionally mimics a natural human hand. The goal of being able to do broad actions and activities in the same way that a regular human hand can was achieved. A working glove controller with a prosthetic arm has been created. The glove controller was able to manage the activities of the prosthetic arm in the most appropriate manner, not only the flexing action, but also the wrist motion, which was an extra benefit for the item grasping action. The prototype created is a low-cost model that can assist prosthesis in the most efficient manner. As a result, a humanoid 3-D printed prosthetic arm was created and constructed to satisfy the project\'s goal.
References
[1] Alejandro Ca˜nizares, Jean Pazos and Diego Ben´?tez, “On the use of 3D printing technology towards the development of a low cost robotic prosthetic arm”, 2017 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC 2017), Ixtapa, Mexico. [2] William Taube Navaraj, Habib Nassar and Ravinder Dahiya, “Prosthetic hand with Biomimetic Tactile sensing and force feedback”, 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, Japan. [3] Amit Hasan Khan, Fairoz Nower Khan, Lamiah Israt and Md. Saiful [4] Islam, “Abdulla Samy, “Thumb Controlled Low-Cost Prosthetic Robotic”, 2019 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India. [5] Huichan Zhao, Kevin O’Brien, Shuo Li and Robert F. Shepherd, “Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides”, December 2016, Science Robotics, Vol. 1, Issue 1, eaai7529. [6] Matthew B. Burn, Anderson Ta and Gloria R. Gogola, “ThreeDimensional Printing of Prosthetic Hands”, March 2016, The Journal of Hand Surgery. [7] Yu She, Chang Li, Jonathon Cleary and Hai-Jun Su, “Design and Fabrication of a Soft Robotic Hand with Embedded Actuators and Sensors”, May 2015, Journal od Mechanisms and Robotics. [8] Peter J Kyberd and Adrian Poulton, “Use of accelerometers in the control of practical prosthetic arm”,October 2017, IEEE Transactions on Neural Systems and Rehabilitation Engineering, Volume: 25, Issue: 10. [9] Ujwal, Rakshith Narun, Harshell Surana, Naga Surya and Ch Preetham Dheeraj, “Voice control based prosthetic human arm”, July 2018, International Research Journal of Engineering and Technology (IRJET), Volume: 05 Issue: 07. [10] Panipat Wattanasiri, Pairat Tangpornprasert, and Chanyaphan Virulsri, “Design of multi grip patterns, prosthetic hand with single actuator”, June 2018, IEEE Transactions on Neural Systems and Rehabilitation Engineering, Volume: 26, Issue: 6 . [11] Mohamad Amlie Abu Kasima, Cheng Yee Lowb, Muhammad Azmi Ayuba, Noor Ayuni Che Zakariaa, Muhammad Haszerul Mohd Salleha, Khairunnisa Johara and Hizzul Hamlia, “User friendly LabVIEW GUI for prosthetic hand control using Emotiv EEG headset”, 2016 IEEE International Symposium on Robotics and Intelligent Sensors, IRIS 2016, Tokyo, Japan. [12] Shiva Subhashini Pakalapati, G. Govardhana Chary, Atul K. Yadaw, Sushil Kumar, Hitesh K. Phulawariya and Rahul Kumar, “A Prosthetic hand control interface using ESP8266 Wi-Fi module and android application”, 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India. [13] Farah Alkhatib, John-John Cabibihan and Elsadig Mahadi, “Data for benchmarking low-cost, 3D printed prosthetic hands”, Data in Brief, Volume 25, August 2019, 104163. [14] Jayant Y. Hande, Niket Malusare, SubodhSawarbandhe and HarshalDarbhe, “Design of a robotic hand using Flex sensor”, December 2015, International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE) Volume 4, [15] Issue 12, . [16] John-John Cabibihan, M. Khaleel Abubasha, and Nitish Thakor, “A method for 3D printing patient specific prosthetic arm with high accuracy shape and size”, 2018 IEEE Access, Volume 6, 2018. [17] Mohammed Fattah Saqib, Aurnab Islam, MD Labib Arefin Bari, Mir Sadif Ahmed and MD. Arif Abdulla Samy, “Gesture controlled prosthetic arm with sensation sensors”, 2018 3rd International Conference for Convergence in Technology (I2CT), Pune, India. [18] SR Yadhuraj, BG Sudarshan, SCP Kumar, DM Kumar, “Analysis of Linear and Non-linear parameters of HRV for opting optimum parameters in wearable device”, materials today: proceedings. [19] Dinesh Mohan, “A Report on Amputees in India”,The American Orthotic and Prosthetic Association.
Copyright
Copyright © 2022 Prof. Amit Narote , Shaikh Noor Alam, Shaikh Faizan Azad , Manjeet Kagada . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET41541
Publish Date : 2022-04-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online