

Ijraset Journal For Research in Applied Science and Engineering Technology
Military Based Fixed Wing Scouting of an Unmanned Aerial Vehicle
Authors: Priyashree S, Praveen Prabhu, Mahesh R, Nandeesh D K, Jayanth A Kanago
DOI Link: https://doi.org/10.22214/ijraset.2023.49564
Certificate: View Certificate
Abstract
Unmanned Aerial Vehicles (UAV) is in constant development since First World War. As the technology became complex and compact, the UAVs are also being utilized for commercial purposes. The main purpose of a UAV was for scouting, to perform certain operations in remote areas with minimal human interference and to eliminate the risk of human pilots. UAVs are classified based on their weight, range of operation, type of model, and fuel consumption. At present, multi-rotor drones with high mobility are widely used for commercial sectors especially, aerial photography, sports, surveys, etc. Most of the drones are electric-based which provide a maximum of 30 minutes flight time that is sufficient for small scale applications. There are combustible fuel based drones in development, but they are very expensive, also multi-rotor drones are inefficient and provide less output per input. Hence fixed winged drones come into picture with an acceptable output to input ratio that are very inexpensive for mass production. They have longer flight time, a very wide range of operation and can cover more ground area in less time compared to multi-rotor drones. This model also has its cons, which include necessity of wide area to operate, with less mobility in smaller area, complex design, need for skilled personnel and complex pilot training process. From this perspective it is observed that the implementation of fixed winged UAV is very efficient, especially for performing long distance operation with larger ground coverage, such as forest survey, delivering cargo in remote locations, scouting border territories and as signal flares to signal the current crash location.
Introduction
I. INTRODUCTION
Unmanned Aerial Vehicles (UAVs) were originally developed through the twentieth century for military missions and by the twenty-first century they had become the most essential asset for most of the military operations. As control technologies improved and costs reduced, their usage expanded into many non-military applications which include aerial photography, product deliveries, agriculture, policing, surveillance, infrastructure inspections, science, smuggling and drone racing. The term drone has been used from the early days of aviation, being applied to remotely-flown target aircraft. They are used especially for practice firing of a battleship's guns, such as the 1920s Fairey Queen and 1930s de Havilland Queen Bee. Some of the classic applications of drones include Airspeed Queen Wasp and Miles Queen Martinet, before ultimate replacement by a radio-controlled target drone produced by the Australian Government Aircraft Factories - GAF Jindivik.
An unmanned aerial vehicle (UAV) is defined as a “powered, aerial vehicle that does not carry a human operator, it uses aerodynamic forces to provide vehicle lift that can fly autonomously or be piloted”. UAV can be classified based on three parameters, (i) Based on the weight, (ii) Based on the degree of autonomy and (iii) Based on the altitude.
Taking all these factors into consideration, the designing and building a fixed wing-based UAV focuses mainly on high-speed scouting capabilities. The significant features of this model includes: Monoplane with dual propulsion system (twinjet), full operating range of 500 meters, operate in auto mode with GPS tracking system and live telemetry (data link), first person view (FPV) system and all these facilities take up with a minimum flight time of at least 29 minutes.
II. LITERATURE REVIEW
The Brushless Direct Current (BLDC) Motor [1] are typically used for low-speed high torque appliances. There are also various tests being performed over a specifically designed BLDC motor for high torque low-speed appliances. BLDC is the most preferred motor type due to high efficiency and high torque in the low-speed range for specific applications like avionics.
The Angle of Attack Sensor for Small Fixed-Wing Unmanned Aerial Vehicles [2] aims to designs and construct an angle of attack (AOA) sensor for small fixed-wing unmanned aircraft.
The AOA sensor for small aircraft has two main components: a mechanism for measuring wind direction and a sensor for measuring the angle of rotation of the device. The mechanical design is asymmetric cross-sectional shape, NACA 009, that can operate with airspeed 10–30 m/s. AOA sensor with Pixhawk4 board is more preferred for electronic devices of electronic aircraft that must be lightweight, durable, and accurate. The design and the verification of a brushless DC motor is integrated into an actuator for aircraft applications. The electromagnetic design with thermal analysis has been carried out to verify the brushless DC motor temperatures during its operation. BLDC motors are more suitable for Aircraft as it is verified that the loads can be sustained for several minutes without exceeding the insulations temperature limits.
The Design Analysis and Considerations of Power Efficient Electronic Speed Controller (ESC) for Small-scale Quad-copter Unmanned Aerial Vehicle [3], focuses on the power electronics design considerations of ESC for drones. Multiple power transistor technologies implementations Si-IGBT, SiC, and GaN are implemented to achieve the best flight time optimization. GaN technology appears to have the advantage of having the minimum loss across all throttle conditions.
The Development of a Dynamic Electronic Speed Controller for Multi-copter [4], discusses about a self-developed free programmable ESC equipped with a rotary encoder that is used for precise and dynamic speed control with a high-resolution position sensor in combination with a 72MHz microcontroller. This paper also provides details about assembly design and the mathematical modelling of the permanent magnet synchronous motors (PMSM) with a propeller for the multi-copter.
The implementation of ESC for multi-copter provides high dynamic and low energy consumption, with underlying flatness-based control during aviation. The proposed fixed wing UAV is estimated to be aviating efficiently and navigate with maximum accuracy. The airplanes are designed based on suitability of type of foam for light weight and durability. Also, various test models are built for different design features and recurring flight tests are conducted on these models based on their design specifications.
III. METHODOLOGY
A. Working principle
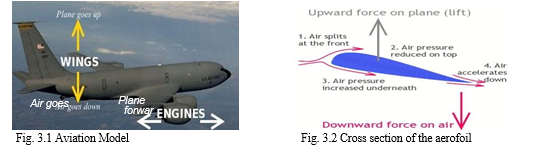
A plane's engines are designed to move the plane forward at high speed. That makes air flow rapidly over the wings, which throw the air down toward the ground, generating an upward force called lift that overcomes the plane's weight and holds it in the sky as shown in Fig 3.1. According to Newton's third law of motion, “For every action, there is an equal and opposite reaction” which explains how the engines and wings work together to make a plane move through the sky. The force of the hot exhaust gas shooting backward from the jet engine pushes the plane forward. That creates a moving current of air over the wings. The wings force the air downwards and this pushes the plane upward.
B. Aerodynamics
- Pressure difference in Plain
The wings make lift by changing the direction and pressure of the air that crashes into them as the engines shoot them through the sky. When air rushes over the curved upper wing surface, it has to travel further than the air that passes underneath to a principle of aerodynamics called Bernoulli's law, fast-moving air is at lower pressure than slow-moving air, so the pressure above the wing is lower than the pressure below, and this creates the lift that powers the plane upward shown in Fig 3.2.
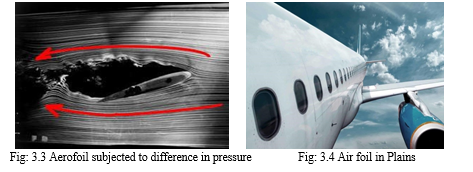
According to Newton's third law of motion, if air gives an upward force to a plane, the plane must give an (equal and opposite) downward force to the air. So, a plane also generates lift by using its wings to push air downward behind it. That happens because the wings are not perfectly horizontal, but tilted back very slightly so they hit the air at an angle of attack. The angled wings push down both the accelerated airflow (from up above them) and the slower moving airflow (from beneath them), and this produces lift. Since the curved top of the airfoil deflects (pushes down) more air than the straighter bottom (in other words, alters the path of the incoming air much more dramatically), it produces significantly more lift shown in Fig 3.3.
Generally, the air flowing over the top and bottom of a wing follows the curve of the wing surfaces very closely and as the angle of attack increases, the smooth airflow behind the wing starts to break down and become more turbulent and that reduces the lift. At a certain angle (generally round about 15°, though it varies), the air no longer flows smoothly around the wing. There is a big increase in drag, a big reduction in lift, and the plane is said to have stalled.
2. Thrust in Plain
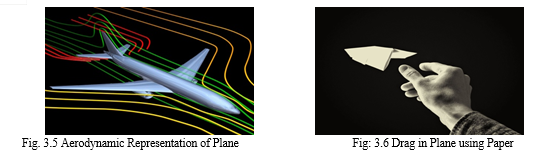
One crucial component of an airplane’s aerodynamics is the force of thrust. The propulsive force created by the propeller or rotor works to counteract the effects of two of the other four forces of flight -weight and drag as shown in Fig. 3.4.
If this weight is not accurately determined, it will affect the plane’s performance. It will also result in miscalculating the fuel volume needed for the flight, and even the plane’s ability to take off safely. If the plane cannot generate enough lift and thrust to compensate for the weight, then some weight must be removed. It is usually suggested to replace materials with stable, yet lighter materials or carry fewer passengers and less cargo, to reduce the excess load on the vehicle.
An airplane’s propeller generates thrust by utilizing the principle of Newton’s Third Law, which states that for every action, there will be an equal and opposite reaction. A propeller or jet engine pushing air to the rear will have the effect of moving the plane forward unless some other force offers a force in the opposite direction. The plane’s propeller will push enough air past it to cause the aircraft to move in the opposite direction of this force. The propeller must work with a high level of efficiency to provide the necessary thrust for takeoff and flight. The mass of the fuel needed to power the propeller flight must also be accommodated. As the flight continues, fuel is consumed. As the fuel is consumed, its mass is reduced. As mass is reduced, less thrust is needed.
3. Weight in Plain
One of the significant forces among the four forces of flight is weight. Weight is the force caused by gravity. This weight includes not only the aircraft itself, but also the mass of the cargo, fuel, pilot, and any passengers. Increased weight indicates that the aerodynamic forces of thrust and lift must also increase as shown in Fig 3.5. If this weight is not accurately determined, it will affect the performance of the plane. It will also result miscalculating the fuel volume needed for the flight and plane’s ability to take off safely.
4. Drag in Plain
Drag is a rear-facing force caused by the disruption of airflow over the wing, fuselage and other components of the plane. The force of drag must be overcome through the forward momentum of the aircraft. To reduce drag, it also needs to alter the design of the aircraft. The concept of Drag in Plane using Paper is shown in Fig 3.6. The curved shape of the wing creates lift by making the air move faster across the top of the wing and lowering the air pressure. This reduced pressure results in less force pushing down on the wing while maintaining an upward force under the wing, creating lift. It is important to note that these axes move with the aircraft, and change relative to the earth as the aircraft moves. For example, for an aircraft whose left wing is pointing straight down, its "vertical" axis is parallel with the ground, while its "transverse" axis is perpendicular to the ground.
On the other hand, the cup will catch the air and not allow it to flow past. Catching or trapping the airflow will result in much more drag. The shape of the plane will allow the air to continue in the direction it was initially flowing without much interruption.
IV. AIRCRAFT FLIGHT CONTROL SURFACES
Aircraft flight control surfaces are aerodynamic devices allowing a pilot to adjust and control the flight attitude of an aircraft. The development of an effective set of flight control surfaces is one of the critical advances in the development of aircraft. Some of the early efforts at fixed-wing aircraft design succeeded in generating sufficient lift to get the aircraft off the ground, but once aloft, the aircraft proved uncontrollable, often with disastrous results. The development of effective flight controls is what allowed stable flight.
A. Axes of motion
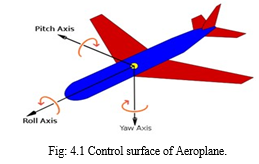
An aircraft is free to rotate around three axes that are perpendicular to each other and intersect at its centre of gravity (CG). To control position and direction a pilot must be able to control rotation about each of them. The Axis of motion is shown in Fig 4.1.
B. Propeller
The propeller, coupled with the engine, is what produces enough thrust to move a plane forward. Once the plane is moving forward, the remaining four forces of flight combine to provide the necessary lift to get the aircraft in the air. These aerodynamic forces of flight, all working optimally together, result in an efficient and a safe voyage.
C. Transverse axis
The transverse axis is also referred to as lateral axis. It passes through an aircraft from front wingtip to rear wingtip. The rotation about this axis is called pitch. The pitch changes the vertical direction based on the nose of aircraft that is pointing towards. Among the flight control surfaces, the elevators are the primary control surfaces for pitch.
D. Longitudinal axis
The longitudinal axis passes through the aircraft from nose to tail. Rotation about this axis is called roll. The angular displacement about this axis is called bank. The pilot changes bank angle by increasing the lift on one wing and decreasing it on the other. This differential lift causes rotation around the longitudinal axis. The ailerons are the primary control of bank. The rudder also has a secondary effect on bank.
E. Vertical Axis
The vertical axis passes through an aircraft from top to bottom. The rotation about this axis is called yaw. This yaw changes the direction the nose of the aircraft is pointing towards left or right. The primary control of yaw is with the rudder. Ailerons also have a secondary effect on yaw.
V. BLOCK DIAGRAM
The block diagram of the proposed UAV model is as shown in Fig. 5.1. The system consists of major components that include: Propulsion System, RC Transmitter and Receiver, Control surface, Power system, Flight Controller, Radio Telemetry, Video Telemetry and Global Positioning System.
A. Propulsion system
The proposed model consists of two BLDC motors coupled with propellers that are used to generate thrust required to develop propulsive force for the propeller. The ESC are used to regulate the BLDC motors.
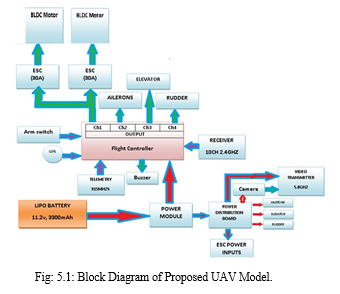
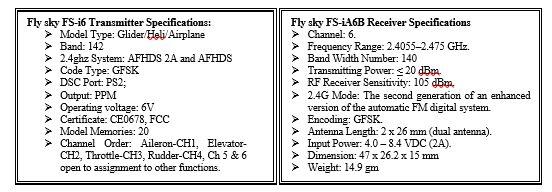
B. RC Transmitter and Receiver
Radio Transmitter is an electronic device that uses radio signals to transmit commands wirelessly via a set radio frequency over to the Radio Receiver, which is connected to flight controller of the UAV being remotely controlled.
???????C. Control surfaces
The three control surfaces namely rudder, ailerons and elevator which are being controlled using servo motors and flap mechanism.
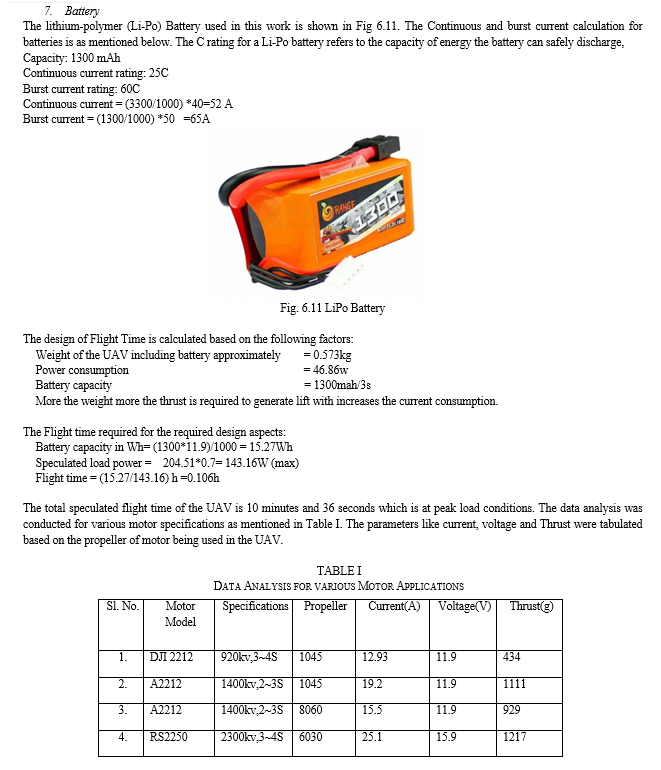
???????D. Power System
The power system consists of lithium-polymer (Li-Po) battery as power source and a power distribution board with battery eliminator circuit (BEC) which steps down the voltage to 5V and supply other additional system & the direct battery supply is distributed to BLDC motors and First-person view( FPV) system.
???????E. Flight controller
The flight controller (FC) is the brain of the aircraft. It consists of a circuit board with a wide range of sensors that detect movement of the drone, as well as user commands. Using this data, it then controls the speed of the motors to make the craft move as instructed. It prevents the motor from turning when the pilot is not ready to fly (a safety feature). Also, it prevents take-off before the autopilot is fully configured and ready to fly.
???????F. First Person View (FPV) System
First-person view (FPV), also known as remote-person view (RPV), or video piloting, is a method used to control a radio-controlled vehicle from the driver or pilot's view point. Most commonly it is used to pilot a radio-controlled aircraft or other type of unmanned aerial vehicle (UAV). It consists of Radio telemetry and video telemetry.
- Radio Telemetry: The radio telemetry refers to the scientific payload installed onto the UAV. This system uses a Software Defined Radio (SDR) front-end and is designed to communicate with the UAV during flight. This system provides us vital information of the UAV’s live status like acceleration, battery charge, height, pressure, GPS co-ordinates and operating mode which enables the system to determine the right course of action and helps us to recover the UAV when crashed.
- Video Telemetry: Video telemetry provides real-time video footage from the FPV camera to the remote screen. There are 3 components in this system: FPV camera, Audio\Video Transmitter and Audio\Video Receiver.
???????G. Global Positioning System (GPS) module
The Global Positioning System (GPS) is a satellite-based navigation system that provides location and time information. A GPS module calculates its position by precisely timing the signals sent by GPS satellites and conveys the information to the flight controller.
VI. DESIGN AND ANALYSIS OF FIXED WING UNMANNED AERIAL VEHICLE
A. Hardware Components
The major components used in the fixed wing UAV are: Plane Body Design, BLDC Motors and appropriate ESC, Propellers, Servo motor & control horns, Radio Controlled Transmitter & Receiver, Flight Controller & GPS and Battery.
- Plane Body Design: The technical data for the design of plane body is as follows: Minimum number of channels: 4, that includes Ailerons, elevator, rudder and throttle, Size of the plane body: 810 mm wing span and 640 mm length, Average maximum weight with battery: 495 gm, Centre of gravity: 46mm – 52cm from the front of the wing.
- Fuselage: The fuselage is a long cylindrical shell, closed at its ends, which carries the internal payload. The dominant type of fuselage structure is semi-monocoque construction. These structures provide better strength-to-weight ratios for the central portion of the body of an airplane than monocoque construction. A semi-monocoque fuselage consists of a thin shell stiffened in the longitudinal direction with stringers and longerons and supported in the radial direction using transverse frames or rings measurements are shown in Fig. 6.1.
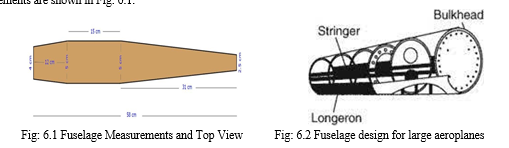
The strength of a semi monocoque fuselage depends mainly on the longitudinal stringers (longerons), frames and pressure bulkhead. The skin carries the cabin pressure (tension) and shear loads, the longitudinal stringers carry the longitudinal tension and compression loads, and circumferential frames maintain the fuselage shape and redistribute loads into the airframe shown in Fig. 6.2
The fuselage and most of the plane body will be built with foam board and 3D printed parts. Planes are drawn for parts made out of foam and 3D models using in .stl file for 3D printing. The Fuselage design from side view is shown in Fig. 6.3.
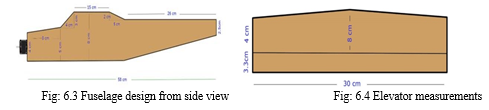
3. Elevator
Elevators are flight control surfaces, usually located at the rear end of an aircraft, which control the pitch of the aircraft and along with the angle of attack and the lift of the wing. The design of the elevator is as shown in Fig. 6.4
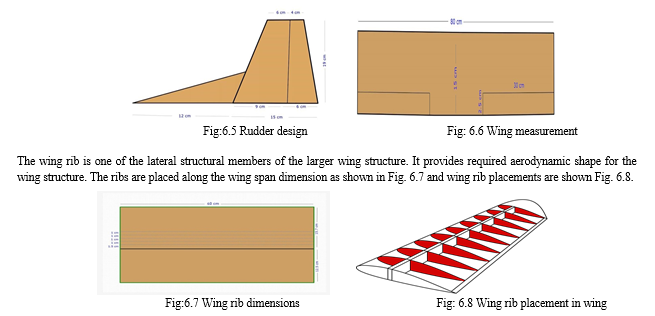
Rudder is a flight control surface, usually located at the rear of an aircraft, which control the yaw of the aircraft. Wing is an airfoil that helps lift a heavier-than-air craft. When positioned above the fuselage (high wings), wings provide an unrestricted view below and good lateral stability. The design and view of the Rudder is shown Fig. 6.5 and wing measurements are shown in Fig. 6.6
4. Servo Motor and Control Horns
Servo motors are used to provide actuation for various mechanical systems. Since they have high mechanical strength and low weight they are ideal for the control surfaces on a plane. Due to their affordability, reliability, and simplicity of control by microprocessors, they are used in robotics applications which is one of their advanced features.
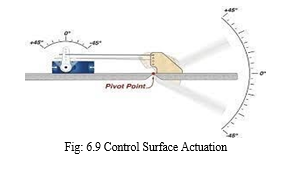
Flaps – Increase lift as shown in Fig. 6.9 but also increase drag. Using flaps, an aircraft can fly slower before stalling. Flaps are often used to steepen the landing approach angle and let the plane land at a slower touchdown speed (as well as letting the aircraft lift off at a slower takeoff speed).
5. Radio Controlled Transmitter and Receiver
A radio frequency transmitter-receiver board receives data and transmits it wirelessly to different components via its antenna. The wireless communication technique is extremely useful, especially for small scale applications where data exchange is required. Radio control (often abbreviated to RC) is the use of control signals transmitted by radio to remotely control a device.
The essential criteria for selection of components include: Minimum number of channels required = 4, which includes BLDC Motor, Rudder, Elevator and Ailerons.
6. Flight Controller
Pixhawk 2.4.8, as shown in Fig.6.10, is used as the flight controller in this work. It is a general-purpose flight controller based on the Pix-hawk project FMUv2 open hardware design Processor along with appropriate sensor and Interface facilities.

VII. RESULTS AND DISCUSSIONS
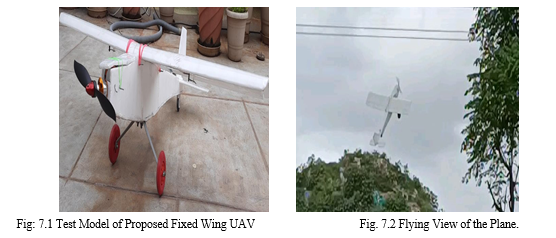
The UAV designed in this work is built with Deprone foam board which was lighter weight compared to the PVC foam board. The Deprone foam based RC airplanes are observed to be very durable. Different types of foam can be used in the manufacture of planes based on different applications. The main foams used are Expanded Polystyrene (EPS), Expanded Polypropylene (EPP), Expanded Polyolefin (EPO) and Depron.
This project was executed with three different UAV models. Each of these models weighted around 300 grams with good flying system but moderate mechanical strength. The model was also laminated to provide better mechanical strength. Fig. 7.1 shows the Test Model of the proposed Fixed wing UAV model and Fig. 7.2 shows the flying view of the model.
VIII. ACKNOWLEDGMENT
We express our most sincere acknowledgements to the Management of B.N.M Institute of Technology for giving us an opportunity to execute the work effectively. We also express our sincere gratitude towards the faculty of Electrical & Electronics Engineering Department for their continuous encouragement and co-operation during the conduction of this work.
Conclusion
The proposed fixed wing UAV is aviated efficiently and navigated with maximum accuracy. This efficient model weighed around 1.287Kg and consumed 82.46W of power. The estimated flight time of the UAV is 28 minutes. The budget for the project is around Rs. 40,000. The process also included, building of various test models and performing different flight tests on these models. The test flight is simulated using flight simulation software. The design is adaptable for changes in design specifications. The system is compliant for additional features for future enhancement of the model. The thrust test is executed successfully and suitable propulsion system for the flight system is selected very effectively. The UAV is expected to aviate efficiently.
References
[1] Mustafa Yaz, “Brushless Direct Current Motor Design and Analysis”, Crimson Publishers, published on 29 September 2021. [2] Kriangkrai Wanngoen, Nanthawat Saetunand, Watcharapol Saengphet and Suradet Tantrairatn, “Angle of Attack Sensor for Small Fixed-Wing Unmanned Aerial Vehicles”, MDPI, Basel, Switzerland, 2020. [3] Young Tae Shin, Ying-Khai Teh , “Design Analysis and Considerations of Power Efficient Electronic Speed Controller (ESC) for Small-scale Quadcopter Unmanned Aerial Vehicle”, 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC). [4] Lukas Herrmann, Tobias Bruckmann , Markus Brocker and Dieter Schramm, “Development of a Dynamic Electronic Speed Controller for Multi-copter”, 2019 18th European Control Conference (ECC), June 2019. [5] Lukas Herrmann, “Development of a Dynamic Electronic Speed Controller for Multicopter”, Conference: 2019 18th European Control Conference (ECC), DOI- 10.23919/ECC.2019.8795711. [6] M. D’Andrea, “Brushless DC Motor for Primary Flight Surface Actuator”, 2020 International Conference on Electrical Machines (ICEM), DOI- 10.1109/ICEM49940.2020.9270696, Aug-2020. [7] Nathalie Mitton,“Long-Range Wireless Radio Technologies : A Survey ”, DOI-10.3390/fi12010013, January 2020. [8] Roman Nadolski, Krzyszt of Ludwinek,Jan Staszak, Marek Jaskiewick, “Utilization of BLDC motor in electrical vehicles”, PRZEGL?D ELEKTROTECHNICZNY (Electrical Review), ISSN 0033-2097, R. 88 NR 4a/2012. [9] Martin Simons , “Model Aircraft Aerodynamics”, 5th edition , published by Chris Lloyd Sales & Marketing, 15 January 2015. [10] M. D Singh, “Power electronics”, TMH publisher, 2nd edition 2007.
Copyright
Copyright © 2023 Priyashree S, Praveen Prabhu, Mahesh R, Nandeesh D K, Jayanth A Kanago. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET49564
Publish Date : 2023-03-15
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online