

Ijraset Journal For Research in Applied Science and Engineering Technology
Path Finder Autonomous Robot
Authors: Prof. A S Salavi , Prof. D A Bhosale
DOI Link: https://doi.org/10.22214/ijraset.2023.49614
Certificate: View Certificate
Abstract
Now a days many robots have come Developed for automation and navigation is robotics Emerging technologies that reduce human work. Many A variety of robot navigation techniques are available. This is a project to create a robot that finds the world safe way Plan and avoid obstacles. It has an infrared sensor Used to detect obstacles in the robot\'s path. Robot avoid the obstacles in the way and move forward specific direction. An infrared sensor is used for detection Interrupt and send the information to the controller and then Processing input microcontroller redirects using robots Motors that are controlled by motor drivers.
Introduction
I. INTRODUCTION
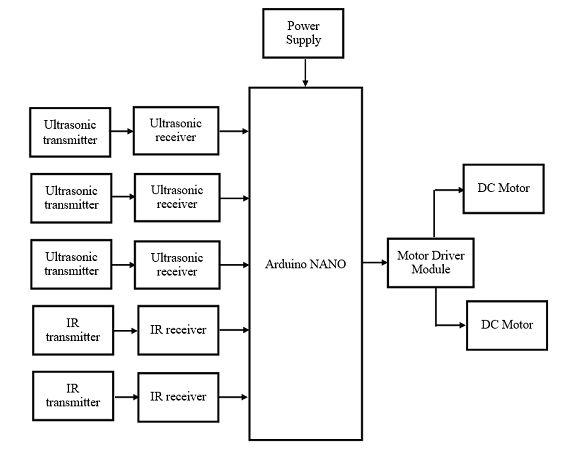
Now a days, robots are considered as an important element in society. This is due to the replacement of humans by robots in basic and dangerous activities. However, designing an efficient navigation strategy for robots and ensuring their securities are the most important issues in autonomous robotics. Many industries are using robots due to their high level of performance and reliability. The obstacle avoidance robotics is used for detecting obstacles and avoiding the collision. The path planning problem is one of the most interesting and popular topics. The aim of the robot path planning is to search a safe path for the autonomous robot. The design of path finder with obstacle avoidance robot requires the integration of many sensors according to their task. The obstacle detection is the primary requirement of this autonomous robot. The robot gets information from surrounding area through mounted sensors on the robot. The path finder with obstacle avoidance robot uses ultrasonic sensors for its movement by detecting obstacle and avoiding collision. A microcontroller Arduino NANO is used to achieve the desired operation. The motors are connected to the motor driver Module to microcontroller. Our contribution is to solve the problem of robot path planning with obstacle avoidance.
II. INFORMATION GATHERING AND ANALYSIS (LITERATURE SURVEY)
A. R Ismail1*, Z Omar2 and S Suaibun3, “Obstacle-avoiding robot with IR and PIR motion sensors”
Obstacle avoiding robot was designed, constructed and programmed which may be potentially used for educational and research purposes. The developed robot will move in a particular direction once the infrared (IR) and the PIR passive infrared (PIR) sensors sense a signal while avoiding the obstacles in its path. The robot can also perform desired tasks in unstructured environments without continuous human guidance. The hardware was integrated in one application board as embedded system design. The software was developed using C++ and compiled by Arduino IDE 1.6.5. The main objective of this project is to provide simple guidelines to the polytechnic students and beginners who are interested in this type of research. It is hoped that this robot could benefit students who wish to carry out research on IR and PIR sensors.
B. Yee Mon Nyein, Nu Nu Win, “Path Finding and Turning with Maze Solving Robot”
A maze solving robot is a self-contained fully autonomous mobile robot, it can capable of transporting itself to the target of an unknown arbitrary two-dimensional maze. The robot must find its way to the target of the maze simply to return again and again in increasingly more courageous attempts in order to certain the fastest run time. The individual components of maze solving robot system consist of the motor control system, navigation sensor array, and a mapping system or algorithm for navigating the maze intelligently.
The aim of this research is to develop and implement a maze solving robot and find the possible path from the starting point to the target by reducing the collision. This system can also reduce the collision errors which are caused by unbalancing the speed of the two motors.
The main objective is to build fully maze solving robot systems with complex environment. There are a number of techniques which have been used for solving the maze by robot. In this research, flood fill algorithm is used as path finding method to reach the target of the maze.
C. Anupoju Sai Vamsi1, Badana Manasa2, Kocherla Rama Krishna1, Tarigoppula Venu3, A N V N Shashank1, “Design to Implementation of A Line Follower Robot Using 5 Sensors”
The main objective is to design a line follower robot is to carry products in the manufacturing process in industries. In this paper, we mainly focused on the design to work the line follower efficiently with lighter weight. The line follower robot designed with 5 sensors to make the robot move in even complex paths. This paper discussed the mechanical and technical issues with the line follower robot and applications in various fields. In the working model, we used black detector infrared sensors So that speed of response of the robot is high. This paper gives an brief idea about all the components used to prepare a line follower robot.
In existing system human had to enter in the area where human penetration can be dangerous to find the path to reach to the destination. This may be very harmful for human to enter in such area.
After that line follower robot took place of human. These robots could find path by following a line, but it is not possible to use this robots in unknown cluttered environment.
Here we aimed to design an autonomous path finder with obstacle avoidance robot to find the safe path to move source to destination in cluttered environment with detecting obstacles and avoiding collision without any human guidance.
III. PROBLEM STATEMEN
To find out safe path by detecting obstacles and avoiding collision to move from source to destination
IV. SYSTEM ARCHITECTURE AND MODULES
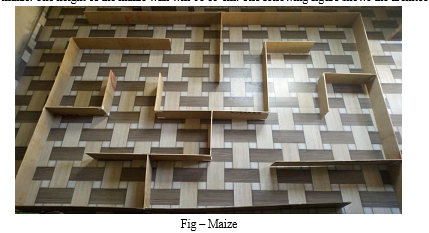
A. Module 1: Maize Building
Build maize by using cardboards. It will be baseless maize. The distance between two walls will be 20 cm which is suitable for robot motion through maize. The height of the maize wall will be 15 cm. The following figure shows the architecture of the maize.
B. Module 2: Robot Building
Built robot using hardware components such as:-
|
Components |
Specifications |
|
Ultrasonic Sensor |
Range 2cm to 400cm |
|
IR (Infrared) sensor |
Range 2cm to 5cm |
|
Motor |
DC motor, 60 RPM |
|
Battery |
12 Volt. |
|
Arduino Nano |
Flash memory- 32Kb SRAM -8Kb EEPRAM -1Kb Input/output pins -22 |
|
Motor Driver Module |
L293D |
|
Caster Wheel |
Caster Wheel Diameter -15mm Wheel Height -17mm Mounting hole –Three, 1200 apart, 3.4mm diameter |
???????C. Module 3: Robot Motion With Obstacle Detection
- Obstacle detection by using ultrasonic sensor
- Calculate distance between the sensor and obstacle
- Move the robot after obstacle detection
???????D. Module 4: Tree Traversal Algorithm
- This algorithm is based on tree data structure.
- This is used to determine the direction towards which robot will move.
- This can be done in 3 ways-
- Pre-order
- In-order
- Post-order
- In our project, we implemented Pre-order tree traversal algorithm
E. Working
When robot will move, this path finder robot will detect the obstacle by using ultrasonic sensor. These ultrasonic sensor work on the sound waves. It contains one transmitter and another is receiver.
When transmitter transmits the sound waves and obstacle is detected then some of these sound waves will be received by receiver. Ultrasonic sensor calculates the distance between the sensor and the obstacle by multiplying the duration taken by sound wave to travel and the speed of sound wave in air.
When obstacle will detect then robot will change the direction. That means when the obstacle is in front of the robot then robot will be move either right side or left or it will take back turn to travel on back side. This way robot avoids the obstacle and also finds safe path to reach to the destination.
Conclusion
A simple, cost effective obstacle detection and avoidance system has been shown in this paper. For detecting obstacles one single sensor was used along with a servo motor. The percentage of accuracy and minimum probability of failure were obtained. The system shows that it can avoid obstacles, able to avoid collision and change its position. It can be said that, with the design more function can be added to perform various work to lessened human’s stress. Finally, the project will be helpful for our environment, defense, and security sectors of the country.
References
[1] B. You, J. Qui, and D. Li, “A novel obstacle avoidance method for low-cost household mobile robot,” in Proceedings of the 2008 IEEE International Conference on Automation and Logistics (ICAL), pp. 111–116, Qingdao, China, September 2008. [2] C. Yang, H. Jianda, and W. Huaiyu, “Quadratic programming based approch for autonomous vehicle path planning in space,” Chinese Journal of Mechanical Engineering, vol. 25, no. 4, pp.665–673, 2012. [3] J.-H. Liang and C.-H. Lee, “Efficient collision-free path Planning of multiple mobile robots system using efficient Artificial bee colony algorithm,” Advances in Engineering Software, vol. 79, pp. 47–56, 2015. [4] J. Borenstein and Y. Koren, “The vector field histogram Fast obstacle avoidance for mobile robots,” IEEE Transactions on Robotics and Automation, vol. 7, no. 3, pp. 278–288, 1991. [5] Y. Koren and J. Borenstein, “Potential field methods and their inherent limitations formobile robot navigation, in Proceedings of the IEEE International Conference on Robotics and Automation,pp. 1398–1404, Sacramento, CA, USA, April 1991. [6] H. Seki, S. Shibayama, Y. Kamiya, and M. Hikizu, Practical Obstacle Avoidance Using Potential Field for A Nonholonomic Mobile Robot with Rectangular Body,” in Proceedings of the 13th IEEE International Conference on Emerging Technologies And Factory Automation, pp. 326–332, Hamburg, Germany, 2008.
Copyright
Copyright © 2023 Prof. A S Salavi , Prof. D A Bhosale. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET49614
Publish Date : 2023-03-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online