

Ijraset Journal For Research in Applied Science and Engineering Technology
Race Car Design and Obstacle Avoidance
Authors: Yash Rajput, Sameer Gupta
DOI Link: https://doi.org/10.22214/ijraset.2024.58326
Certificate: View Certificate
Abstract
Introduction
I. INTRODUCTION
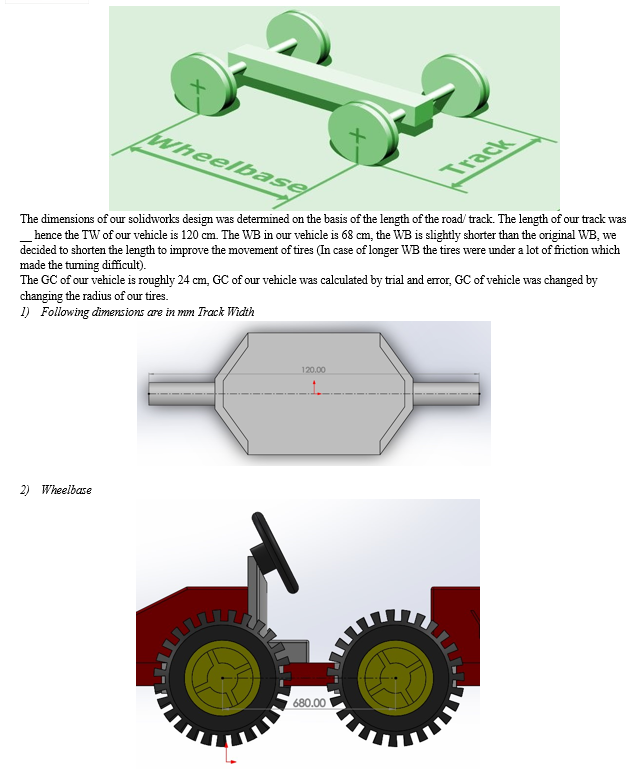
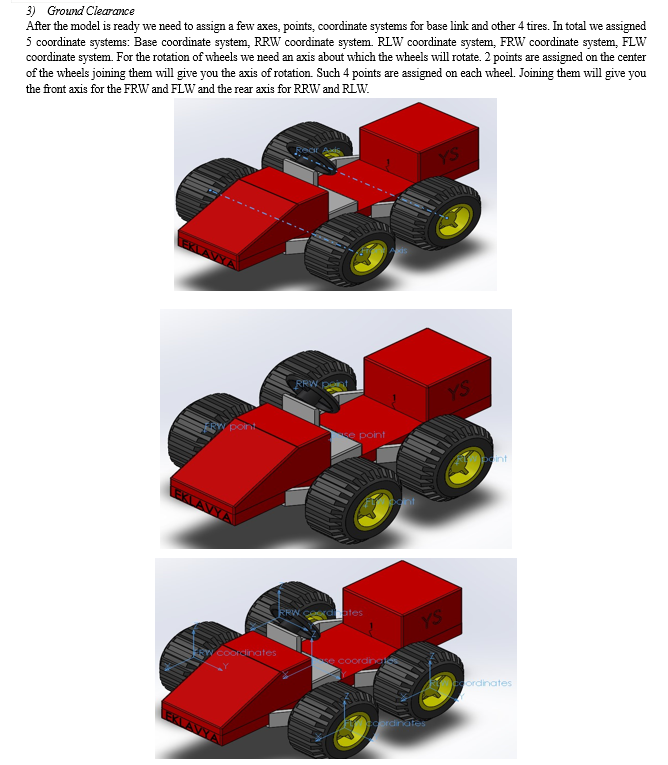
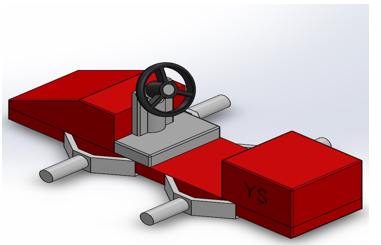
A. Designing of Race car on Solidworks
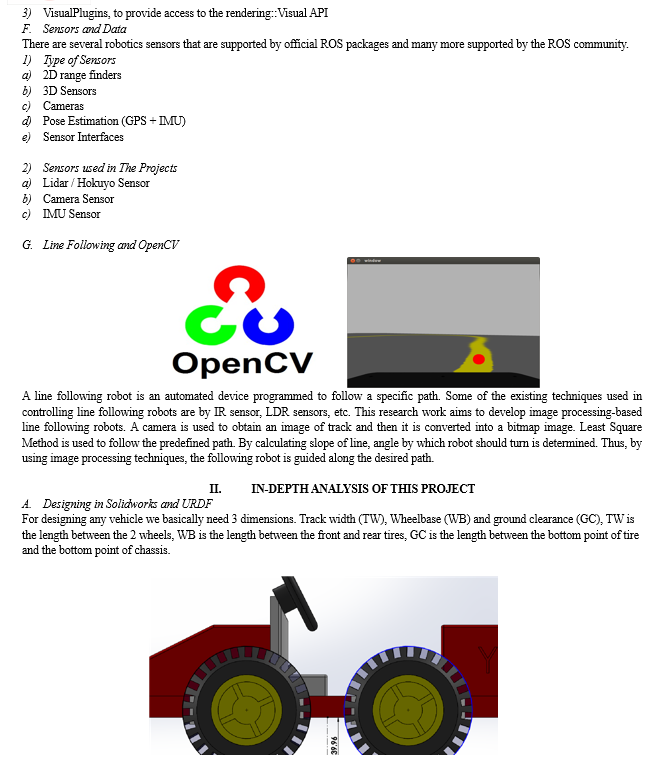
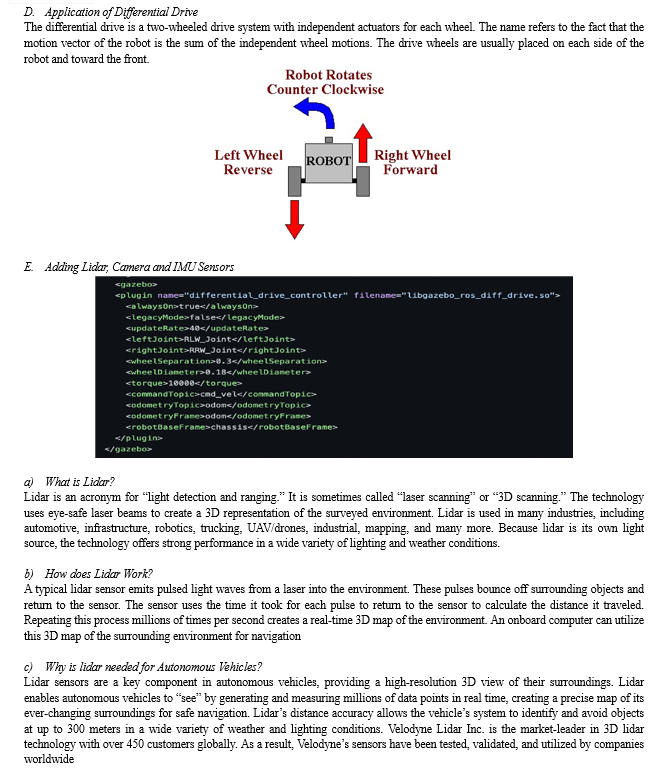
SolidWorks is a solid modeling computer-aided design and computer-aided engineering application Race car was designed on the basis of different measurements such as wheelbase, track width and ground clearance. For the design of the vehicle we had 2 options: Gyro car and Quadracycle A gyrocar is a two-wheeled automobile. The difference between a bicycle or motorcycle and a gyrocar is that in a bike, dynamic balance is provided by the rider, and in some cases by the geometry and mass distribution of the bike itself, and the gyroscopic effects from the wheel. Quadracycle is a European Union vehicle category for four-wheeled microcars, which allows these vehicles to be designed to less stringent requirements when compared to regular cars. We decided to proceed with quadracycle to have better stability and to use diff_drive_controller.




Conclusion
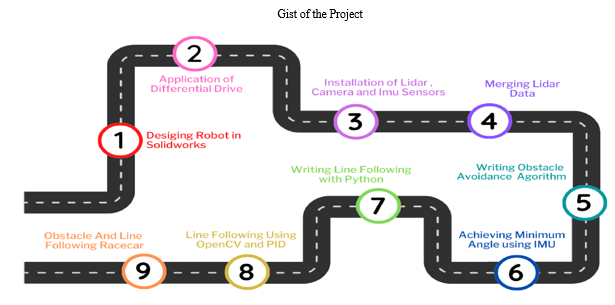
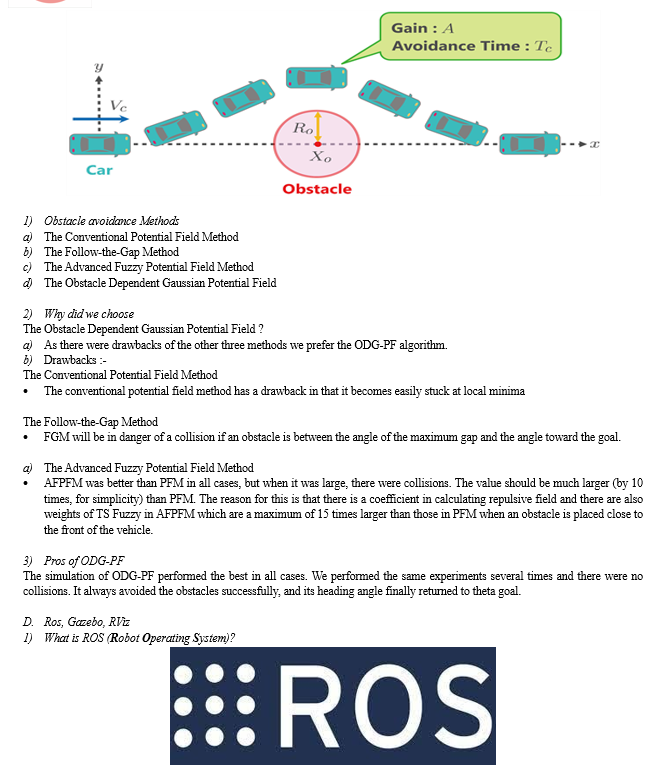
1) So finally in this project we got to learn how to develop your own dynamic robot which solves a real world problem, of automating driving precisely. 2) Writing various python scripts to control a particular operations, Like simple actuations or movements and also the complex ones Like avoiding obstacles and following lines. 3) In this paper, we introduce a novel method for obstacle avoidance, ODG-PF, which avoids obstacles very efficiently and safely. Although AFPFM is an improvement that avoids the local minima problem, its attractive field coefficient should be adjusted when the environment is changed. As with conventional PFM, when the vehicle is in a narrow environment, the repulsive field becomes strong; thus value needs to be large. Otherwise, the robot will be stuck at a local minimum or go toward the goal very inefficiently. 4) Simulations and experiments showed that vehicle movements with ODG-PF were very stable. It seems that this stable movement is because of two reasons. One reason is that it detects and defines obstacles first rather than directly calculating the repulsive field from the distance data, and the other is that it finds the angle with minimum values from the total field function. Thus, ODG-PF does not have the local minima problem that causes a vehicle to become stuck at certain points. 5) One more merit of ODG-PF is that it avoids both static and moving obstacles without any adjustments. In the performed moving obstacle scenarios, the vehicle using it did not collide with any of the static or moving obstacles and instead avoided them using the same method. This is also quite a good point in that it does not need to carry out any time-consuming activities such as image processing or computer vision processing.
Copyright
Copyright © 2024 Yash Rajput, Sameer Gupta. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58326
Publish Date : 2024-02-06
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online