

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review on Robotic Arm Vehicle with Object and Facial Recognition
Authors: Mr. Mahesh Runnaware, Miss. Damini Chaudhari, Mr. Kunal Muddamwar, Mr. Someshwar Muddamwar, Mr. Hemant Shende, Prof. Mr. Mohammad Hassan Ansari , Miss. Neetu N Gyanchandani
DOI Link: https://doi.org/10.22214/ijraset.2022.40162
Certificate: View Certificate
Abstract
In this review paper, we were highlighting the assorted Features of a robotic arm after performing several research papers on Manipulators. Currently, Robotic Arms are widely employed in Multiple Industries to attenuate human errors and increase efficiency, Productiveness, the precision of operations going down. The foremost advantage of introducing a Robotic arm in Industries is that it can add crucial conditions like very heat, pressure environment where it’s hazardous for the human to figure. Since the manipulators come under Flexible Automation they will update and be modified easily. we\'ve got referred to various research papers which have been experimentally verified to verify the various sorts of controllers used, and different methodologies employed in different authors to determine the degree of freedom of a manipulator used for the picking of an object and placed it in an exceedingly specific position. Thus, knowledge acquainted after referring to all these papers will help in designing the Robotic arm.
Introduction
I. INTRODUCTION
During or on the present day in the world, robots and humans are working simultaneously for the completion of their assigned tasks. A Robot is a useful machine that is helping humans in hand-in-hand work in multiple sectors like Industries, Transports sectors, Military undertaking, Medical industries sectors are those common fields in which robotic technologies are highly used. The Technologies are highly effective to work in various hazardous conditions like chemical compounds, radioactive materials, and Bomb Detection, handling molten metal at high temperatures where it might be fatal for people for work. Hence, Robotic is the best replacement for humans to perform these kinds of hazardous tasks.
A. Robotic Arm Definition
A Robotic arm technology could be a robotic human hand prototype during which the arm is formed from several combinations of links attached non-parallel or parallel. Which is been controlled by programmable components like microcontrollers to perform several programmable tasks. The robotic hand is designed to perform several tasks like welding, gripping, spinning, etc. counting on the application. e.g., Robotic arms are the automotive assembly that performs several tasks like welding part rotation and placement during assembly. In some occurrences, close emulation of the human hand is desired.
Types-
- Cylindrical Robot: This kind of robot is utilized to handle assembly operations, handling machine tools like spot welding and handling die casting machines.
- Spherical Robot: This will be a coordinate robot system used for die casting, spot welding, fettling machines arc welding, etc.
- Articulated Robot: It is a robot whose arm includes a minimum of three rotary joints and is used for assembling operations like die-casting, gas welding, and fettling machines.
- Parallel Robot: It is a robot whose arms have concurrent prismatic or rotary joints which are extremely employed in mobile components handling like cockpit flight simulators.
- Anthropomorphic Robot: This type of robot can be a prototype of somebody's hand which is created form of a robotic arm with independent figures and thumbs.
B. Controller
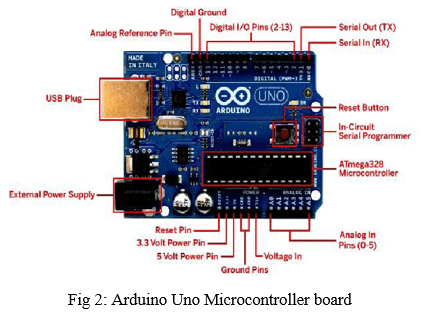
Arduino UNO is a programmable board that comes under the family of Arduino it's a low-cost, flexible, and easy-to-use programmable open-source microcontroller this board contains an ATmega328P microcontroller. Pin configuration it's 14 digital input/output pins (out of 6 pins will be used as PWM outputs), 6 analog inputs pin, and a 16 MHz ceramic resonator, it also contains a USB connection, power jack of 5V and ICSP header, and a button.
It contains every component needed by the microcontroller. This board contains a USB interface to attach to the pc and Arduino IDE (Integrated Development Environment) software is employed to program the board. Serial communication is been established by RX/TX pin where TX could be a transmit pin wont to transmit the serial data were RX pin is employed to receive the serial data.
C. Esp32 cam Module
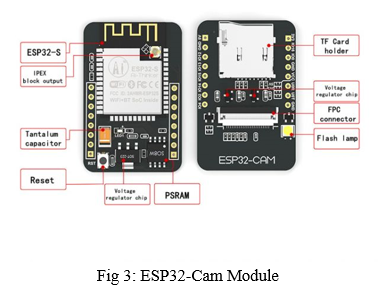
The ESP32-CAM could be a small size, low power consumption camera module supported ESP32 comes under (Electronic Stability Program) components Family. It comes with an OV2640 camera module and provides an onboard TF card slot that supports up to 4G TF cards for data storage. ESP32-S module supports Wi-Fi + Bluetooth with video monitoring and Wi-Fi image upload
And is widely utilized in intelligent IoT applications like QR identifications, smart home devices image upload, Face recognition, intelligent agriculture, and wireless monitoring.
D. Artificial Intelligence
In today’s world AI may be a wildly used Technology in various sectors this technology is employed for programming the pc to create supercomputers. Which have their own intelligence like problem-solving, language processing, higher cognitive process, logical reasoning Etc... AI is nothing but a computer-based program that mainly depends upon their algorithms and therefore the data sets analysis during which the machine can develop their own behavior and act sort of a human mind. To unravel the given task whichever need to perform by the human which helps in advancing the comfort of human but also increasing the productivity of the industries which has cost efficiency both in a qualitative and quantitative way.
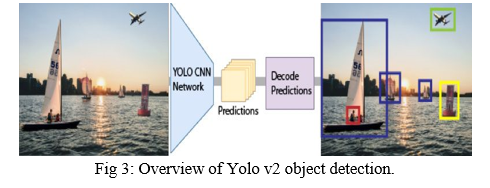
E. Object Detection
Object detection is a region that comes under computer science with the skills of robots and other Ai implementations to acknowledge various things and objects or entities through computer vision. In object detection, the written AI program allows to the selection of photographs and identifying the objects that the vision is taking as input and process through the written algorithm. Mostly this technology is employed in video surveillance or image retrieval system. Etc... The main purpose of object detection is to duplicate the intelligence employing a computer.
F. Facial Recognition
Facial Recognition may be a technology that comes under the branch of computing during which the thing or the person is identifying or confirming an individual’s by their faces. This method is wont to identify the peopling photos, videos, or in real-time, this technology comes under biometric security. for instance, People are were much acquainted with biometric authentication technology by using Facial-ID to unlock their smartphones face detection, face analysis, converting the image to data, etc. during this technology the algorithm runs under several programs and collection of datasets to present the finite accuracy. This technology was highly employed in enforcement, airports, and border control, finding missing persons, and reducing retail crime.

II. APPLICATION OF ROBOTIC ARMS
A. Cooperative Robots
These cooperative robots are erected to work together with other robots, on enormous assembly lines. Robots must unite between running and welding robots to make similar assembly lines serve duly.
B. Robotic Oil
Professional painters are delicate to find and the job is a largely poisonous bone. This makes it perfect for robots, because the makeup job needs to be largely harmonious over a large area of makeup, and reducing the quantum of wasted material can add up to quite a bit of savings over time.
C. Robotic Welding
Robotic welding has been the top robotic operation in the automotive sector for a long time, as every auto needs a high number of welds before it’s complete. Given the high value of the finished product, productivity from robotization is enormous.
D. Robotic Assembly
In numerous automotive shops, robots are assembling lower factors like pumps and motors at high pets. Frequently, robots are performing tasks like windshield installation and wheel mounting to increase outturn.
E. Material Junking
High thickness and repetition make robots perfect for material junking processes like trimming and cutting. This could be in the form of cutting fabrics, trimming plastic moldings and die castings, or indeed polishing molds.
F. Part Transfer and Machine Tending
Pouring molten essence, transferring essence prints, and loading and unloading CNC machines are each stylishly completed by a robot as they're dangerous. When completed constantly with little time-out they can also be a source of major productivity.
III. ACKNOWLEDGMENT
This review paper was carried out at JD College of Engineering and Management, under the guidance of Prof. Mohammad Hassan Ansari.
Conclusion
Hence, we have successfully gone through several Research papers which are been published by different manipulators for better knowledge and understating of the development of Robotic Arm Vehicle.
References
[1] Priyambada Mishra, Riki Patel, Trushit Upadhyaya, Arpan Desai “Review of Development Of Robotic Arm Using Arduino UNO”, International Journal on Recent Researches in Science, Engineering and Technology, ISSN: 2348-3105 Volume 5, Issue 5, May 2017. [2] Priyambada Mishra, Riki Patel, Trushit Upadhyaya, Arpan Desai “Review of Development Of Robotic Arm Using Arduino UNO”, International Journal on Recent Researches in Science, Engineering and Technology, ISSN: 2348-3105 Volume 5, Issue 5, May 2017. [3] Areepen Sengsalonga, Nuryono Satya Widodo “ObjectMoving Robot Arm based on Color”, Signal and Image Processing Letters, Vol.1. No.3, November 2019, pp. 13-19 ISSN 2714-6677. [4] Anughna N, Ranjitha V, Tanuja G “Design and Implementation of Wireless Robotic Arm Model using Flex and Gyro Sensor”, International Journal of Recent Technology and Engineering (IJRTE) ISSN: 2277-3878, Volume-8 Issue-5, January 2020. [5] Rahul Kumar, Sunil Lal, Sanjesh Kumar, and Praneel Chand “Object Detection and Recognition for a Pick and Place Robot”. [6] Dr. Bindu A Thomas, Stafford Michahial, Shreeraksha. P, Vijayashri B Nagvi, Suresh M “Industry Based Automatic Robotic Arm”, International Journal of Engineering and Innovative Technology (IJEIT) Volume 2, Issue 11, May 2013, and ISSN: 2277-3754 ISO 9001:2008 Certified. [7] Timothy Karl Findling “Robotic Arm Tracing Curve Recognized by Camera”, Florida Institute of Technology, Melbourne, Florida December 2016. [8] Prasad Ban , Shweta Desal, Revati Barge , Pallavi Chava “INTELLIGENT ROBOTIC ARM” ,ITM Web of Conferences 32, 01005 (2020) ,ICACC-2020. [9] Sanzhar Rakhimkul, Anton Kim, Askarbek Pazylbekov and Almas Shintemirov “Autonomous Object Detection and Grasping Using Deep Learning for Design of an Intelligent Assistive Robot Manipulation System”. [10] Sharath Surati1, Shaunak Hedaoo1, Tushar Rotti1, Vaibhav Ahuja1, Nishigandha Patel2 “Pick and Place Robotic Arm: A Review Paper” International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 08 Issue: 02 | Feb 2021 www.irjet.net p-ISSN: 2395-0072 [11] Volume 3, Issue 3, March– 2018 International Journal of Innovative Science and Research Technology ISSN No:-2456-2165 IJISRT18MA413 www.ijisrt.com 527 “Review on Design and Development of Robotic Arm Generation-1” [12] © May 2021| IJIRT | Volume 7 Issue 12 | ISSN: 2349-6002 IJIRT 151134 INTERNATIONAL JOURNAL OF INNOVATIVE RESEARCH IN TECHNOLOGY 11 “Review Paper on Wireless Movable Robotic ARM” Rahul Mohadikar1 , Amit Bokade2 , Kalyani Barapatre3 , Sanjana Bagde4 , Dr. J. S. Gawai [13] The Federal Polytechnic Bida, School of Engineering Technology, 8th National Engineering Conference 2018 DEVELOPMENT OF A ROBOT ARM: A REVIEW *Ibrahim Sulaiman, 1Engr. Salam M. O. and 1Yamajin Tanimu.
Copyright
Copyright © 2022 Mr. Mahesh Runnaware, Miss. Damini Chaudhari, Mr. Kunal Muddamwar, Mr. Someshwar Muddamwar, Mr. Hemant Shende, Prof. Mr. Mohammad Hassan Ansari , Miss. Neetu N Gyanchandani. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET40162
Publish Date : 2022-01-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online