

Ijraset Journal For Research in Applied Science and Engineering Technology
Smart White Cane
Authors: Veer Chandra Kamati, Abishek Raj
DOI Link: https://doi.org/10.22214/ijraset.2022.43617
Certificate: View Certificate
Abstract
In this paper, I describe my own model of an ultrasonic blind walking stick with the use of Arduino that helps the visually impaired walk independently. According to the World Health Organization, 30 million people are completely blind, with 285 billion people suffering from vision impairment.[1] If u notice them, you can very well know about they can’t walk without the help of others. One has to ask for guidance to travel without hitting on an obstacle. A person can walk more confidently with this blind stick. This stick detects the object in front of the user and responds by vibrating or issuing a sound command to the user. As a result, the person can walk without stress. This device will be the best solution to overcome their either indoor or outdoor as its ranges can be adjusted from 2 feet to 8 feet distance using a switch.
Introduction
I. INTRODUCTION
A smart white cane or smart blind stick is simply a modified cane for the visually impaired that helps the user to avoid hitting things either indoors or outdoors ranging from 2 feet to 8 feet distance. To record information about the obstacles present on a road, an ultrasonic sensor can be used.
The sensor has two openings: One transmitter and another receiver that works on the principle of sending and receiving its own signal called ultrasonic waves or acoustic waves of frequency 25kHz to 50kHz.[2] It detects reflected responses from objects irradiated with artificially generated energy sources.
This kind of sensor is capable of sensing and detecting far and near obstacles. In addition, It calculates an accurate distance between the blind and the obstacle.
This solution still has some disadvantages, for example, They can’t detect obstructions when the object is placed inclined in such a way, reflected rays don't come to the receiver, and also situations like downward stairs, construction road holes, etc. Usually, the output information comes out as either vibration or sound signals having different frequencies with respect to the distances. Thus, these systems communicate their recommendations to the user through sound frequency or vibration.
The device is user-friendly, reliable, and durable. As it is so handy, users don't need tough training but only 10 to 15 minutes to get comfortable with the device. The device is divided into two parts, one is the closed kit consisting of all circuits, battery, and switch and another is the normal cane either foldable or not.
II. SENSOR AND ACTUATORS
A. Ultrasonic Sensor HC-SR04
It is an ultrasonic sensor, also known as an ultrasonic transducer that is based on a transmitter and receiver and is mainly used to determine the distance between 2 cm to 4 meters from the target object having a measuring area angle of 15 degrees.[3]

The transmitter and receiver are two main parts of the sensor where the former converts an electrical signal to ultrasonic waves while later converts that ultrasonic signal back to electrical signals. It gives precise measurement details and comes with an accuracy of around 99% with an error of 2mm. Altogether it has total of 4 pins having different works of each.
B. Vibration Motor
An eccentric rotating mass vibration motor (ERM) is a DC motor with a small unbalanced mass (called an eccentric weight) that provides a centrifugal force to make vibrations when it turns.[4]

C. Buzzer
A buzzer or beeper is a mechanical, electromechanical, or piezoelectric audio signaling device. Alarm clocks, timers, trains, and other alerting systems are typical applications for buzzers and beepers.

III. PROPOSED SYSTEM
A. System Architecture
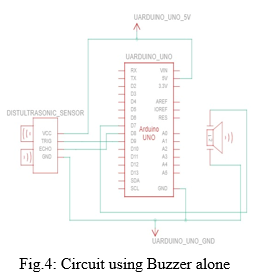
- Using Buzzer
The design of the smart white cane using buzzer is shown in figure 4.
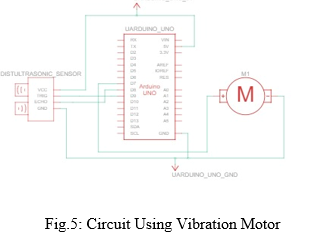
2. Using Vibration motor
The design of the smart white cane using vibration motor is shown in figure 5.
B. Prototype
The smart white cane is designed as shown in figure 6. The stick uses a single sensor called an ultrasonic sensor, a processing unit called an Arduino Uno, an actuator called a buzzer or beeper (type 1), a vibrating motor (type 2), and a 9V battery. The ultrasonic sensor is adjusted in such a way that it makes a straight position for the detection of objects in front of it making it at an angle of 75 degree which is connected to either buzzer or motor.

Tests on an ultrasonic sensor as a barrier and obstacles object detector, in this test the sensor can detect objects with a distance of 2 cm to 400 cm. An Arduino UNO is used to control the sensor and actuators. The complete circuit including ultrasonic sensor, beeper, and motor is powered by a 9V battery. Trig pin and echo pin is connected to digital pin 9 and 8, the buzzer or motor is connected to pin 7 whereas all the negatives are connected to gnd. As the object gets closer, the time lap of sound produced by the buzzer becomes shorter as well as the speed of vibration of motor increases. This helps users to figure out how far the object is or how close they are approaching it.
Conclusion
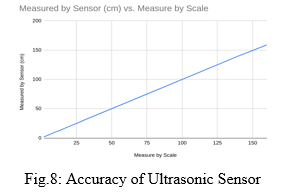
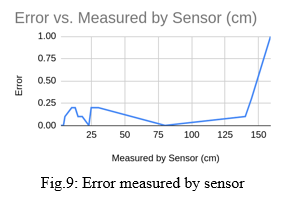
Ultrasonic sensor, Arduino is tested individually as well as integrated. As ultrasonic sensors work on the principle of echo, studying its reflection on different obstacles is very important. The measurement cycle starts with transmitting the ultrasonic waves from a transmitter with a speed of 343 m/s and then waits for 2 sec, while the receiver is receiving the reflected waves from the obstacles. The rising frequency depends onmeasured distance as shown in Fig.8. We tested how the ultrasonic sensors performed during practical use compared to manual calculation using scale/ inch tape.After several trials of the system on the smart white cane, it can be concluded that: 1) The process of detecting objects using ultrasonic sensors works well and is stable by having distance conditions. 2) The maximum distance of object detection on a smart stick reaches 400cm. Also as a whole, this system offers a low-cost, reliable, portable, low-power consumption, and robust solution for obstacle detection with an obvious short response time. Though the system is not yet completed as a device to launch in the market, it is useful to a greater extent due to its accuracy and lightweight. Further aspects of this system can be improved via technology for determining the speed of approaching obstacles. Adding features like GPS tracking, water sensor, and more.Visually handicapped and blind individuals in all developing countries were at the forefront of our minds as we developed such an empowering solution.
References
[1] World Health Organization, “Visual Impairment and Blindness,” Fact sheet N “282”, Oct 2014. [2] Ultrasonic sensor In engineering, Available from : https://www.sciencedirect.com/topics/engineering/ultrasonic-sensor, 2016 [3] Use of Ultrasonic Sensor to Measure Distances by TechMartian [4] AB-004: Understanding ERM Vibration Motor Characteristics.
Copyright
Copyright © 2022 Veer Chandra Kamati, Abishek Raj. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET43617
Publish Date : 2022-05-30
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online