

Ijraset Journal For Research in Applied Science and Engineering Technology
Vehicle Overspeed Detection and Number Plate Extraction Using Raspberry Pi
Authors: Rakesh Kumar Y, Suma Latha.P
DOI Link: https://doi.org/10.22214/ijraset.2023.54195
Certificate: View Certificate
Abstract
The worst possible scenario for a road user is a traffic accident. The majority of fatal incidents are caused by overspeeding. Vehicles travelling faster are more likely to be involved in collisions. In the past, numerous gadgets were employed to catch reckless highway driving. Most of the approaches require human concentration and involve a lot of effort, which is difficult to implement With the help of this project, we hope to create a system for the early identification and warning of reckless driving-related unsafe vehicle driving patterns. The entire implementation requires an IR transmitter, an IR receiver, a control Raspberry Pi. The police employ a system to determine the speed limit based on the volume of traffic in the area. The time taken by the vehicle to travel from one set point to the other is calculated by control circuit and depending on that value the speed of the vehicle is calculated. Moreover, if the vehicle crosses the speed limit, it captures the image and extract the details of number plate using “Optical Character Recognition”.
Introduction
I. INTRODUCTION
Road transportation is the transport service for passengers or goods on roads can be via bike or automobiles or by animal such as horse or oxen. Standard networks of roads were adopted by Romans, Persians, Aztec, and other early societies. Modern roads came into adoption during the late 1700's with civil engineering.
It is the second important mode of transport in India. It reaches every region of the nation that even the railway transportation could not. The country's industrial and agricultural sectors both benefit from the basic infrastructure services provided by road transport.
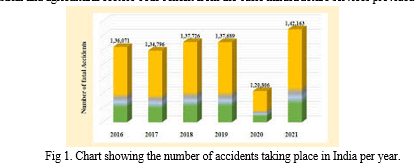
Over the years, India has seen a steep rise in road accidents. Fig1 shows the number of accidents taking place in India per year. According to a report on road accidents in India released by the Ministry of Road Transport and Highways, 2022 has seen the greatest rise in number of accidents in five years’ accidents more than the previous years, of which over speed is main cause of increase in accidents. To overcome this problem and decrease death rate due to accidents, introduction of new and innovative speed enforcement technology is necessary.
Today, reckless driving puts both the driver and the broader public in grave danger. Although reckless driving is a severe issue, patrol officers' present methods for detecting it are insufficient. First of all, given the huge mileage of driveways, the number of patrol officers is far from enough to observe and analyze every driver's behaviours. Second, rash driving norms are merely descriptive, and visual observations cannot accurately capture the specifics of nighttime or inclement weather driving. Today, authorities must utilise a handheld radar gun to aim at the car and record the speed in order to identify reckless driving. If a car is travelling faster than the posted limit, the nearest police station is notified, and the car will be stopped. This is a time-consuming and inefficient process because one must inform the appropriate parties following detection. This system cannot be trusted with human life since the number of automobiles grows daily.
After taking into account all of these factors, a model is created for a highway over-speeding car detection circuit to prevent reckless driving by utilising various electrical tools including IR sensors and Raspberry pi. Though the proposed model can also be designed by using only microcontroller alone but due to its high complexity and high cost, use of Raspberry pi preferable over it.
II. LITERATURE SURVEY
Various methods are used for vehicle speed detection. These methods used in various area according to their function, advantages and limitation. There are various methods describe which are used for speed detection of vehicle in different areas like Fixed instantaneous speed cameras (Gatso speed cameras, Truvelo speed cameras), Average speed cameras, Police operated equipment (LIDAR speed gun, Radar speed gun), GPS system, GSM Network.
The vehicle counting system[1], which can indentify traffic density. PCA is used to classify vehicles into a spesific class. Vehicle feature data training is fed into the system by Haar training method [2].
Real-time video processing is used to estimate vehicle speed. Vehicles are classified using Principal Component Analysis (PCA). In real time, the Kalman filter is used to track and identify passing cars. The vehicle's speed can then be estimated using the Euclidean Distance approach [3].
This system is used to detect the speed of the vehicle [5], uses 8051 Micro controller to detect the speed. If vehicle crosses the speed limit, it gives a buzzer which alerts the police at that location and at the control room through wireless transmission. This system is designed only to find the speed of the vehicle. Using this we can’t extract the details of Number plate.
For the control of excessive speed violations, this system features a reporting, recording, and warning system [6]. When the car is approaching the speed limit, a warning is displayed, and if the limit is exceeded, the microcontroller logs the speed and time that were violated. Implementation is system is complex since it requires separate receiver and transmitter section.
In order to calculate the speed of moving objects without experiencing the issues associated with conventional radars, SDCS employs a number of image processing techniques on video streams in online (recorded from a single camera) or offline modes [7]. The four steps of the SDCS process can be broken down into the following groups: the object detection phase, the object tracking phase, which entails three subsequent operations, the object segmentation, labelling, and the object canter extraction. Then speed calculation phase, which is calculated from the number of frames consumed by the object to pass-by the scene. The last stage is called "Capturing Object's Picture," when objects that exceed the speed limitations are photographed.
III. PROPOSED MODEL FOR OVER SPEED DETECTION USING RASPBERRY PI
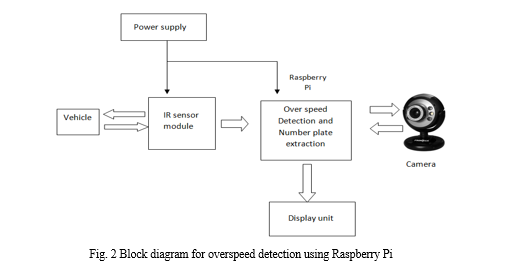
Due to the shortcomings of earlier techniques, a highway speed checker circuit was developed using various electronic components, including a Raspberry Pi [8], an IR sensor module, and other components. The block diagram for a common speed checker that uses a Timer to detect reckless driving on highways and consists of a Raspberry Pi, a sensor module, and a display module is illustrated in Figure 2.
A. Vehicle Detection
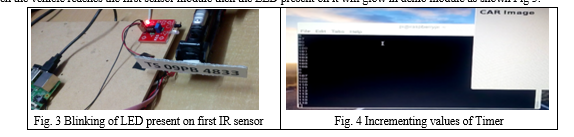
To detect the vehicle IR Sensor module is used. This IR Object Detection sensor module circuit is shown in Fig 3. It consists of a potentiometer, an IR LED, a photodiode, an IC Operational amplifier and an LED. Infrared LEDs produce this light. The infrared light is detected by the photodiode. A voltage comparator is an IC Op- Amp. The output of the sensor is calibrated using the potentiometer in accordance with the specifications. The photodiode's resistance decreases dramatically when the IR LED's light strikes an item before incidentally striking the photodiode. One of the op-amp's inputs is at the threshold value that the potentiometer has set. The series resistor of the photodiode serves as the other input to the op-amp. The voltage drop across the series resistor will be significant when the incident radiation is concentrated more on the photodiode. In the IC, the voltage across the series resistor and the threshold voltage are both compared. The output of the IC Op- Amp is high if the voltage across the resistor series to photodiode is higher than the threshold voltage. As the IC's output is coupled. A key element is where the IR LED and IR Receiver are placed. This configuration is known as Direct Incidence when the IR LED is held directly in front of the IR receiver. In this scenario, approximately all of the IR LED's radiation will hit the IR receiver. As a result, communication between the infrared transmitter and receiver is line of sight. If something is in this line, it prevents the radiation from getting to the receiver by either reflecting it back or absorbing it.
B. Over Speed Detection
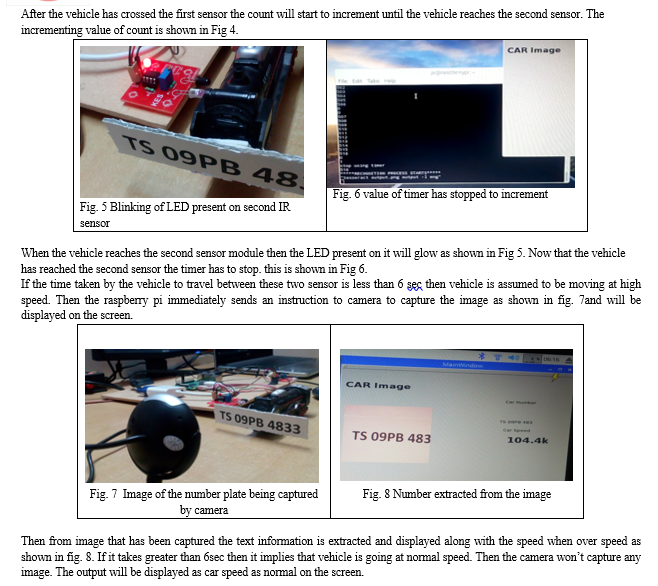
When the vehicle is detected at the first sensor a signal ‘1’ is written on to the GPIO pin 23 of raspberry pi. On receiving the signal, the timer starts to increment its value. It will be continued until the vehicle crosses the second sensor which is located 100mts apart. The input from second sensor is given to GPIO pin 24 of raspberry pi. The value of the timer is then stored in to variable. The value of timer is then compared to the threshold value. Here, the system has been built on the premise that, in accordance with traffic regulations, the top speed allowed on highways is 60 kmph. As the separation between the two sensors is 100mts the time taken for a vehicle which is moving at 60kmph should be 6 sec. Hence the threshold value is taken as 6 sec. As the threshold value is taken as 6 secs if a vehicle takes less time than this then it indicates it is over speeded otherwise it is not .so the raspberry pi gives instruction to camera to capture the image if it is over speeded.
C. Number Plate Extraction
As soon as the vehicle is detected to have exceeded the speed limit then, aN instruction to camera to capture the image is sent. Then from image the Textual information present on it is extracted. This can be done using the technique called “Optical Character Recognition” [9]. So in order to do this Optical Character Recognition [10] Software used is “Tesseract”, an optical character recognition engine for various operating systems. So by sending an image, the text can be extracted from it. The command used for calling this software is //Extract=” tesseract output.png output -1 eng”.
But before giving an image for Tesseract to convert into text so need to capture the image. The image captured should be stored, resized according to our requirement and then save it. all this can be done using some of the predefined functions present in “OpenCV” [11] library functions. Some of the functions used are:
In order to instruct the camera to capture the image the function used is cvCaptureFromCAM(), and stored into the memory using cvcreatememstorage(), Then extract the frames from the captured image using the function cvQueryFrame();obtained image is saved using the function cvSaveImage(); after saving the image text from the image is extracted using QText Stream.
III. RESULTS AND DISCUSSIONS
Intially when the Raspberry Pi is connected to the power supply the LED present on it starts blinking. When the vehicle is about to reach the first sensor the timer is not at started so it gives the readings as zero on Raspberry pi Command Prompt.
When the vehicle reaches the first sensor module then the LED present on it will glow in demo module as shown Fig 3.
Conclusion
This project is a low cost and efficient embedded vehicular speed detecting system. The work aimed at implementing the better results by comparing the existing methods such as FFT, DSP and LASAR based techniques. The output is more accurate with no other moving objects in the surrounding. This project consists of three main modules; Sensor module to detect the vehicle, a Raspberry Pi which is used to calculate the speed of the vehicle detected, a camera that automatically captures the snap of the over speeded vehicle and license plate number is extracted. The prototype has been implemented and successfully detects the over speed and extracts the license plate along with informing the respected authority. A. Future Scope The need of vehicle security due to the fact that they are various cases of car robbery. The system can be integrated with face detection technique. An automatic SMS to can be send to the car owner to inform that he has crossed the speed limit.
References
[1] M. F. Rachmadi, F. Al Afif, W. Jatmiko, P. Mursanto, E. A. Manggala, M. A. Ma’sum, dan A. Wibowo, “Adaptive Traffic Signal Control System Using Camera Sensor and Embedded System” TENCON 2011 - 2011 IEEE Region 10 Conference, pp. 1261 – 1265, 2011. [2] F. Al Afif, M. F. Rachmadi, A. Wibowo, W. Jatmiko, P. Mursanto, and M. A. Ma’sum, “Enhanced Adaptive Traffic Signal Control System Using Camera Sensor and Embedded System” MicroNanoMechatronics and Human Science (MHS), 2011 International Symposium. pp. 367-372, 2011. [3] A. Nurhadiyatna, B. Hardjono, A. Wibisono, W. Jatmiko and P. Mursanto, \"ITS information source: Vehicle speed measurement using camera as sensor,\" 2012 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Depok, West Java, Indonesia, 2012, pp. 179-184. [4] D. F. Llorca et al., \"Two-camera based accurate vehicle speed measurement using average speed at a fixed point,\" 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 2016, pp. 2533-2538, doi: 10.1109/ITSC.2016.7795963. [5] Mr.Mulik Nitin Shivaji ,Mr.Mohite Vishal Laxman, Mr.Masal Omkar Suresh,Ms.Ukirde Navnee Sunil, “Wireless Speed Driving Detection System of Vehicle”,International Journal for Scientific Research and Development(IJSRD),Volume 3,Issue 02,2015. [6] Rubini.R and Uma Makeswari.A, “Over Speed Violation Management of a through ZIGBEE”, International Journal of Engineering and Technology (IJET), Volume 5,Issue 1 ,Feb-Mar 2013. [7] Osman Ibrahim, Hazem ElGendy, and Ahmed M. ElShafee, Member, IEEE., “Speed Detection Camera System using Image Processing Techniques on Video Streams”, International Journal of Computer and Electrical Engineering, (IJCEE) Volume. 3, Issue No. 6, December 2011. [8] Halfacree, Gareth. \"Raspberry Pi - The Model B\". bit-tech.net. Dennis Publishing Limited. Retrieved 10 June 2013. [9] Suen, C.Y.; Plamondon, R.; Tappert, A.; Thomassen, A.; Ward, J.R.; Yamamoto, K. (1987-05-29). Future Challenges in Handwriting and Computer Applications. 3rd International Symposium on Handwriting and Computer Applications, Montreal, May 29, 1987. Retrieved 2008-10-03 [10] Kay, Anthony (July 2007). \"Tesseract: an Open-Source Optical Character Recognition Engine\". Linux Journal. Retrieved 28 September 2011 [11] Pulli, Kari; Baksheev, Anatoly; Kornyakov, Kirill; Eruhimov, Victor (1 April 2012). \"Realtime Computer Vision with OpenCV\". Queue. pp. 40:40–40:56. doi:10.1145/2181796.2206309.
Copyright
Copyright © 2023 Rakesh Kumar Y, Suma Latha.P. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET54195
Publish Date : 2023-06-18
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online