

Ijraset Journal For Research in Applied Science and Engineering Technology
War Field Spying Robot Controlled by Raspberry Pi
Authors: Dr. S. Ramachandran, Dr. S. Rathinavel, Dr. G. Balaji, V. Kokilavani, V. Sounthariya, S. Tamilarasi
DOI Link: https://doi.org/10.22214/ijraset.2022.44440
Certificate: View Certificate
Abstract
The major goal of this design is to deal with delicate scenarios when people are unable to navigate scripts such as darkness, entering tiny spaces, and spotting retiring losers. The robot is an ideal machine for the defense sector, as it will help to reduce mortal life loss while also preventing illegal conditioning. The robot is tone-powered, with a backup installation in case the base station\'s connection is lost. Wireless cameras transmit real-time videotape and audio inputs to a base station examiner, which may be viewed, and action taken as needed. With a major view, to increase the amount of safety of the soldiers, if we know the activities of the enemy by maintaining a safety distance with them because, the flexibility of defense and attacking of the soldiers can be increased. It consists of a lock to position the enemy and to guide the missile, and the robotic system will also consists of a metal sensor that detects the metals such as land mines and other explosives that could cost the lives of our soldiers and the system can be controlled remotely. In creating this concept, we wanted to offer our army the ability to locate and land mains safely and attack them without damaging their lives. The project was created an army could locate explosives in the land safely, for increasing the safety of our army men and live to attack the enemies without putting our lives at risk.
Introduction
I. INTRODUCTION
Every minute, robotics will advance, while our country's troops will perish in large numbers. We have to find a solution with that way we can design robots that are useful to the warriors, we can increase the safety of their lives. Nowadays there a particular number of robots which are assisting the soldiers, and it will be the future generation of robots that can be handled by anyone [1-5].
This robotic system will be adaptable to all types of environment. Then the mobile phone may manage it up to 800 meters away. We can assure this robot to detect any building because the robot can climb stairs.
This robot will be able to adapt to any environment. It can be controlled from a mobile phone up to 800 meters away. we can send it to any building because it can climb stairs. It has a metal sensor that can start the movement if it detects land mains, and we may view the camera on our laptop, computer, or television. With our controller, we can turn off and on the metal sensor, then it has a laser that locks the position where the missile can be guided [6-8].
This chassis of this system was designed as a separate setup. This robot can run inverted on the rocks, stairs, and uninhabited lands as well as forward and backward. We use a stepper motor for this, allowing us to run for a complete revolution and to stop at a specific direction and angle. Our goal is that the adjustment of the motor’s position in order to raise and lower robot’s speed whenever we like. A “C” form has been carved out of the wheels to assist the user in climbing steps and stones [9-11].
The chassis was designed in Solid Works and printed using 3D printing, with ABS as the material.
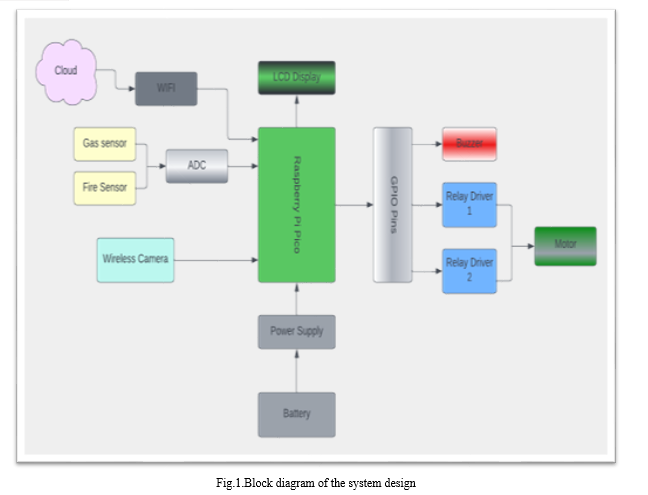
II. SYSTEM DESIGN
An electromagnetic relay is a device which contains a wire coil that is allowed to wrap around an iron core (soft) (solenoid), and a yoke of iron, an iron armature that can be moved, and it also consists of a set of contact or more sets of contacts. And the robot’s armature was pivotally connected to the yoke of the system and mechanically connected to one of the set of contact or more sets of moving contacts. If the relay of the system is in off condition, the spring holds the armature in place, creating the air gap which is caused in the magnetic circuit.
Anyone in the two set moving contacts in the system relay shown is in on condition, while the opposite is in off condition during this scenario. This is based on their role within the relay. Then the remaining relays can have a lot of sets of connections or a small number sets of connections. And by wiring the armature with the yoke of the relay that is used. The yoke connected to the PCB ensures circuit continuity between the armature's movable contacts and thus the circuit track of the computer circuit board (PCB).
When the current passes in the coil, it creates a sustainable magnetic field that is responsible for the activation of armature, which in turn responsible for the movement of the moving contacts and establishes and disconnects the contacts which are fixed (depending on structure). When the coil is activated with direct current, diodes or resistors are frequently placed in a direction that is crossed to the coil for the dissipation of the energy from the field (magnetic) that decays when we stop the activation. Causes harmful voltage spikes in semiconductor circuit components. In some cases the relay is responsible for driving a large amount or extreme amount of reactive load, where surge currents can occur around the output contacts.
III. HARDWARE AND SOFTWARE USED
In this system the coil is designed to get a power supply with an (AC) alternating current, the magnetic flux of the system is allowed to split to a two components which is out-of-phase that cancel each other out, reducing the minimum consumption of the armature throughout the AC cycle. Different types of relay contacts are used depending on the application. Low-resistance materials have a tendency to get oxidized by the atmospheric air or it have a tendency to "stick" instead of splitting (cleanly) on opening. Low electrical resistance, high strength, or high capacity may be possible characteristics of a contact material. Additional dissipation of heat features and arcing management that occurs if a circuit breaks can be included in circuits which consists of contacts that is carrying ten or more amount of amperes. Switching between normal open and normal close for the accommodation changes caused in the system circuit in controlled condition.
A. Raspberry Pi
The Raspberry Pi is a microcontroller circuit board which is completely based on the RP2040. This board comprises a size of 51mm in length and 21 mm in breadth, which comprises the same amount of size like the ESP3 Kit and somewhat large in size than the Arduino Micro. The Pico has 2 Mega Bytes memory of QSPI flash, and accurate amount of 25pins of RP2040's and 30 GPIO pins have been extended for expansion connections. In this project, you will learn how to program Raspberry Pi using Micro Python which is connected to a computer. This is the regular Raspberry Pi, with which no pins attached. We can also purchase a pre-soldered Raspberry Pi board (pico). The RP2040 is their first in-house microcontroller chip and it is very powerful. The main chip is on board
B. Gas Sensor
There are many types of gas sensors, each with different sensitivity levels, gas types, and other specifications. This Insi0.2ght is about a methane gas sensor that can detect gases like ammonia that are created by methane. The gas being monitored comes into contact with the sensing element, which ionizes it and then adsorbs it.
A steel exoskeleton with a sensing device makes up the gas sensor module. The current is applied to this sensing device by connecting the leads. The heating current is causing the gases near the sensing element to be ionized and absorbed by the element. The sensing resistance varies depending on the applied voltage.
C. Flame/Fire Sensor
A flame sensor is defined as a sensor which has the ability to detect and give responds to the existing flame or presence of fire, making flame detection possible. By producing sounds with an alarm, and disconnecting the fuel line connected which includes propane or natural gas line, and a fire suppression system can be activated then the possible responses are detected from the flame, depending on the installation. When flame detector is used in the industries, the major work of the sensor to check that the furnace used in the industries are operating properly; the flame detector can also be used to disconnect the ignition system, During many abnormal situations they do a little higher by not only warning the operator or the control system. Not only fire the fire detectors has the ability to detect several other phenomena or products of fire which includes smoke, heat and any other infrared or ultraviolet light radiation that are caused due to fire or it can also detect the combination of all these..
D. WIFI Module
Your ESP8266 WiFi module is a powerful, low-cost WiFi module that can be used to add WiFi connectivity to an existing microcontroller project. When powered up, the module can even be used as a standalone WiFi device. The physical connection to the ESP8266 module is simple, but there are a few things to keep in mind about the power supply: the ESP8266 requires a 3.3V power supply and should not be connected to a 5V power supply. To communicate with a 5V microcontroller like most Arduinos, the ESP8266 requires level conversion to 3.3V.
E. ADC
An analog-to-digital converter (ADC) is a device that converts data from an analog form to a digital one. An audio CD is created by transforming analogue sound signals into digital data. Analog-to-digital conversion is a process of producing digital signal from an analog signal, without converting the essential information in the signal.
The Analog to digital converter consisting a voltage signal can take anyone from a numerous number of values which results as an infinite number. Some of the known examples for the creation of images with waves are sine waves, waves generated by human speech and the signals that gets transmitted from the old tv camera. The ADC's output has specific amount of levels and/or states. The number of levels or states is always equal to a power of square values which is two: 2, 4, 8, 16, and so on.
F. Python
Python is a free and widely-used programming language that can run on a variety of platforms. Python is a programming language that can help you work more efficiently with your systems. You can improve your productivity and reduce your maintenance costs by learning Python
G. Idle
First, Idle must write our Python programs before we can use them. IDLE is a text editor that is like Microsoft Word, which is known for its ability to understand the Python programming language. This allows us to write in a language that the Raspberry Pi can understand and execute.
H. Morse Code
Morse code was created to send text through a series consisting of various phenomena such as on and off tones, through lights, or through clicks. A unique sequence of dots is used and the dashes can also be of use or it can be represented by "Dits" and "Dahs" for each character. "SOS" -a global distress signal-is the most well-known message to send
I. Raspbian GUI
A graphical user interface, or GUI, is an operating system feature that allows users to interact with the system using a graphical interface. The most frequent user interface is the most user-friendly way for people to interact with computers. The name "Graphical" User Interface comes from the fact that it uses pictures, graphics, icons, and pointers.
IV. IMPLEMENTATION OF THE ROBOT AND RESULT
An html web page is set to be open by making use of the HTML programming that can helps us to controls the robot's movement. The generated web page can also be done for supporting live streaming of media output which includes video taken from the integrated Pi camera. I don't know how to do that. The web app displays a manual control interface for the robot.

To make automation as complete as possible, the robot's hardware and software would need to be set up in the same way as described earlier. In addition, the spying robot can be converted into more efficient by comprising the usage of radar sensors, or by using the ultrasonic sensors, and we can also comprise the usage of infrared sensors to detect and locate obstacles.
Conclusion
This study describes a robot that uses a wireless camera which contains an ability to work during the night also which is said to be night vision that is controlled with a mobile phone application. Gas sensors and a bomb dispersal kit can be used to make this robot even more customizable. Military missions, wireless security and surveillance, and search and rescue operations are just some of the applications for this robot model. Every day our army warriors will face death and risk their lives to save ours. I had intended to provide them with something that would help them lower their danger. My war field spy robot project is designed to allow the robot to go anywhere and to detect bombs and missiles. It consists of a laser which can be used to guide the robot missile to the enemy terrain target.
References
[1] Smart Border Management, Sept. 2018, [Online]. Available: http://ficci.in/spdocument/23030/FICCI-BDO-Report-Smart Border Management-.pdf [2] Environmental health in emergencies and disasters 2002. [Online]. Available: https://www.who.int/water-sanitation health/hygiene/emergencies/em2002intro.pdf [3] J. Patoliya, H. Mehta and H. Patel, “Arduino controlled war field spy robot using night vision wireless camera and Android application,” 2015 5th Nirma University International Conference on Engineering (NUiCONE), Ahmedabad, 2015, pp. 1-5. [4] Ashish Zade, Priyanka Rahangdale, Akshay Giri,” X-bee Based Spy Robot with Night Vision Camera”, International Journal of New Technology and Research (IJNTR), Volume 3, Issue 2, February (2017), pp.63-66. [5] S. Meghana, T V. Nikhil, R. Murali, S. Sanjana, R. Vidhya and K. J. Mohammed,” Design and implementation of surveillance robot for outdoor security,” 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information and Communication Technology (RTEICT), Bangalore, 2017, pp. 1679-1682. [6] S. Juang and J. Juang, ’’Real-time indoor surveillance based on smartphone and mobile robot,” IEEE 10th International Conference on Industrial Informatics, Beijing, 2012, pp. 475-480. [7] A. Singh, T. Gupta and M. Korde,” Bluetooth controlled spy robot,” 2017 International Conference on Information, Communication, Instrumentation and Control (ICICIC), Indore, 2017, pp. 1-4. [8] A. Sundaram, M. Gupta, V. Rathod and K. Chandrasekaran” Remote Surveillance Robot System - A Robust Framework Using Cloud,” 2015 IEEE International Symposium on Nanoelectronic and Information Systems, Indore, 2015, pp. 213- 218. [9] G. O. E. Abdalla and T Veeramanikandasamy, ’Implementation of spy robot for a surveillance system using Internet protocol of Raspberry Pi,” 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information and Communication Technology (RTEICT), Bangalore, 2017, pp. 86-89. [10] R. Lin, M. Li and L. Sun,”Real-time objects recognition and obstacles avoidance for mobile robot,” 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, 2013, pp. 1157-1162. [11] A.M. Alex, M.E. Jose, K.S. Rinsily, S. Bosco, S. Shaji, ”Android based intelligent robot for border security,” International Research Journal of Engineering and Technology, vol.4, no.4, pp. 2041- 2043
Copyright
Copyright © 2022 Dr. S. Ramachandran, Dr. S. Rathinavel, Dr. G. Balaji, V. Kokilavani, V. Sounthariya, S. Tamilarasi. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET44440
Publish Date : 2022-06-17
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online